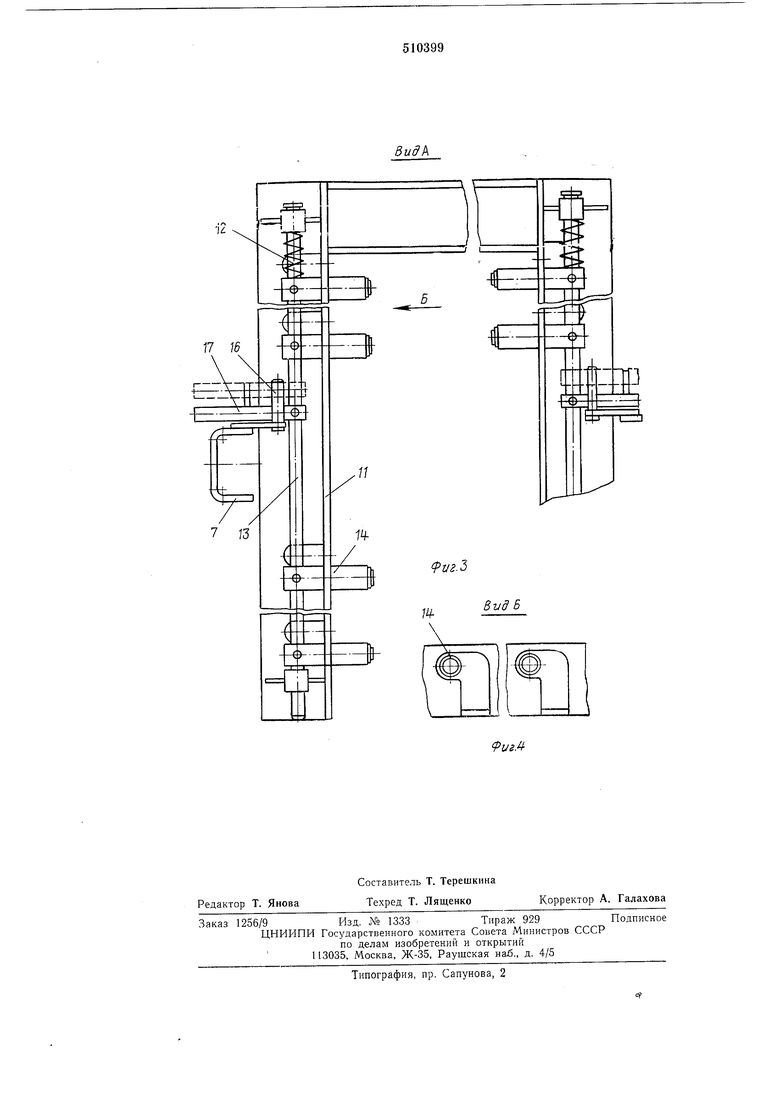
пальцы 14 под действием пружин 12 на поворотные валики 13 зафиксированы в торизонтальной части фигурных lUisoB, удерживая па себе контейнер.
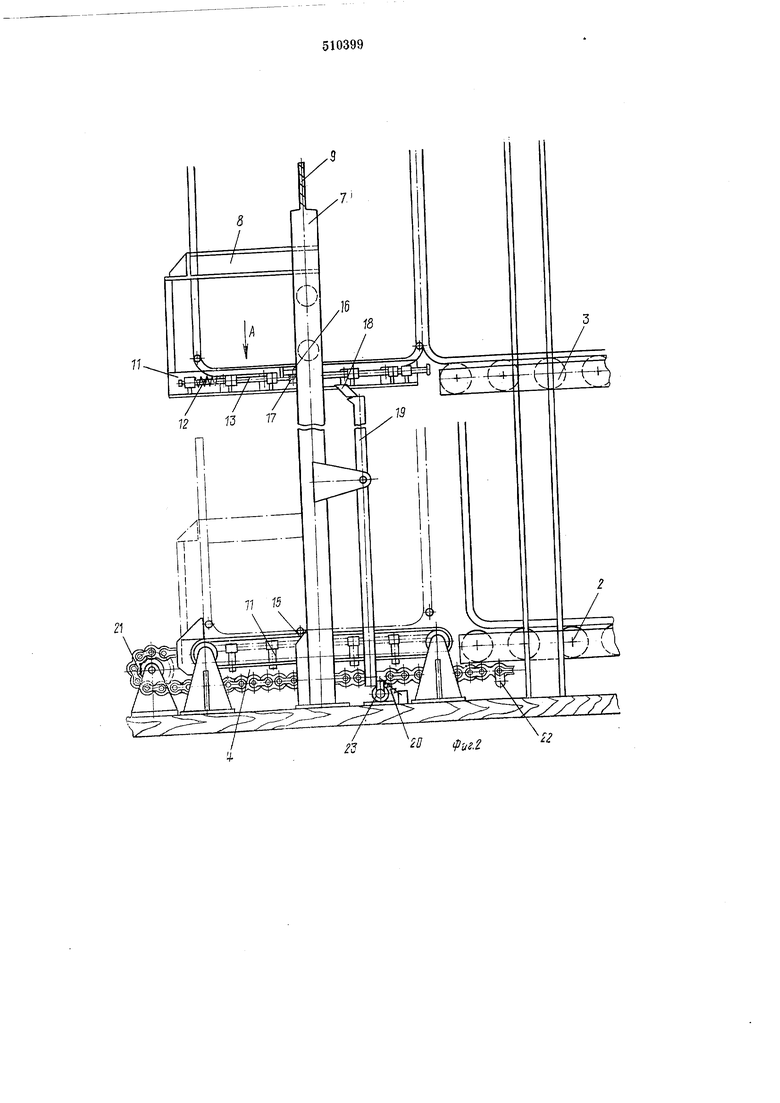
На вертикальных направляющих 7 па уровне верхнего и нижнего ярусов закреплены кронштейны 15 и 16, а на поворотных валиках 13 - рычаги 17, взаимодействующие с кронштейнами 15 и 16. В верхнем положении каретка 8 упорами 18 опирается на двуплечие рычаги 19 с пружинами 20. Двуплечие рычаги 19 шарнирно установлены на кронштейнах 15 и 16 вертикальных направляющих 7.
Цепь 2 устройства для горизонтального перемещения груза посредством упора 22 и распределительного валика 23 взаимодействует с двуплечими рычагами 19.
Работает устройство для перемещения груза с верхнего яруса па нижний следующим образом.
При перемещении пепи 21 устройства 4 для горизонтального перемещения груза на нижнем ярусе упор 22 поворачивает распределительный валик 23, который, в свою очередь, поворачиваетдвуплечие рычаги 19, разжимая пружины 20. Двуплечие рычаги 19 выходят из .зацепления- с упорами 18, освобождая каретky- 8, которая под действием вала стоящего на-ней кЪнтейнера опускается вниз, создавая запас энергии в механизме возврата каретки в верхнее положение. На уровне нижнего яруса рольгангов 2 рычаги 16 поворотных валиков 13 скользят по наклонной поверхности кронштейнов 15, сжимая при этом пружппы 12,И передвигают несущие груз пальцы 14 в вертикальные вырезы фигурных пазов. Под лЧействием веса контейнера пальцы 14 занимают повернутое вниз вертикальное положение, пропустив контейпер на устройство 4 для горизонтального перемещения груза.
Освободившись от контейнера, каретка 8 под действием механизма возврата, поджимается вверх. При подходе каретки 8 к верхнему ярусу рольгангов 3, рычаги 17 упираются в «ронштеййы 16, повернув .-при этом .пальцы 14 в исходное горизонтальное положение.
Как только упор 22 пройдет мимо распределительного валика 23, последний вместе с двуплечим рычагом 19 под действием пружин 20 занимает исходное положение. Каретка 8, поднимаясь вверх; наклонной плоскостью
пора 18 отодвигает двуплечие рычаги 19, пазжимая пружину 20. После достижения кареткой уровня верхнего яруса двуплечие рычаги 19 занимают рабочее положение, удерживая каретку 8 от опускания вниз.
Устройство для перемещения груза с верхнего яруса на нижний готово к следующему
.
Формула изобретения
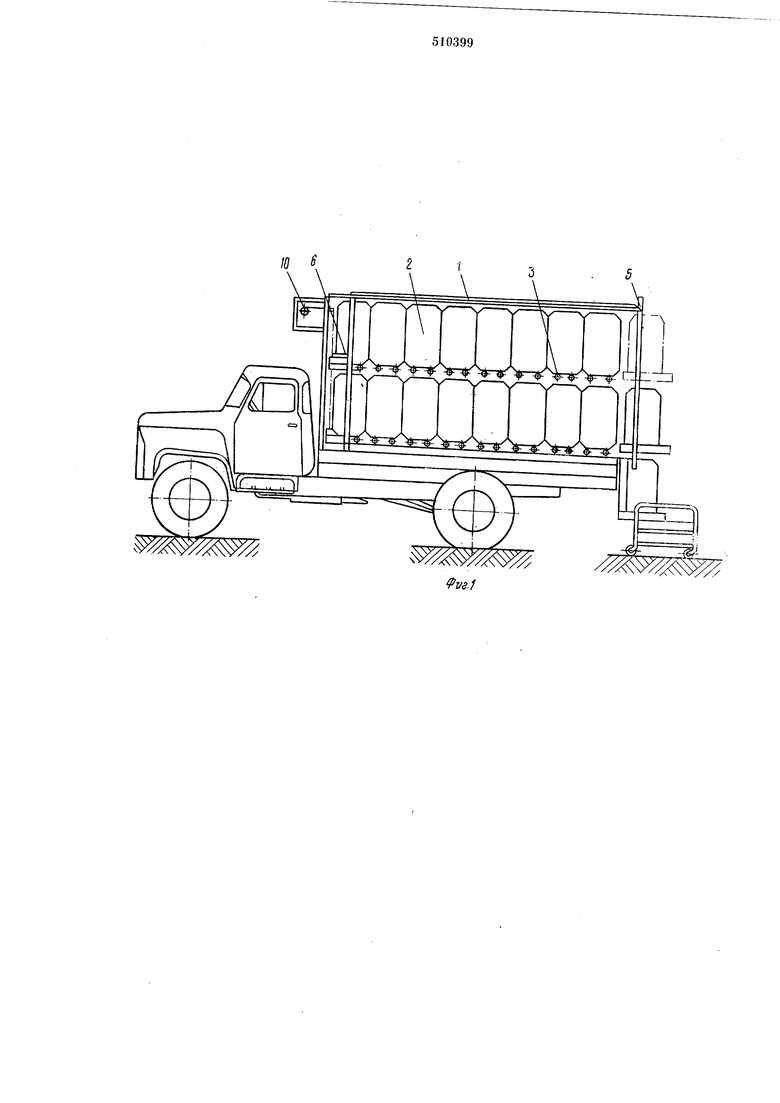
/Хвтомобиль-фургон для перевозки пакетированных грузов, содержащий направляющие, расположенные в два яруса, загрузочное устройство, устройство для перемещения груза с
верхнего яруса па нижний и устройство для горизонтального перемещения груза на нижнем ярусе, отличающийся тем, что, с целью обеспечения плотной загрузки кузова при кольцевой схеме загрузки-выгрузки, устройство
для перемещения груза с верхнего яруса на нижний выполнено в виде вертикальных направляющих с перемещающейся по ним кареткой рамной конструкции, в иоперечинах которой размещены подпружиненные валики
с несущими груз подвижными пальцами, при этом каретка связана с устройством для горизонтального перемещения груза на нижнем ярусе посредством дв).плечего рычага, щарпирно соединенного с вертикальными направляющими, а на вертикальных направляющих на уровне верхнего и нижнего ярусов закреплены взаимодействующие с подпружинениы.ми валика.ми кронштейны. . y 
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
| Кузов-фургон для перевозки пакетированных грузов | 1976 |
|
SU660865A1 |
| Гравитационный стеллаж | 1973 |
|
SU521191A1 |
| Шпаруточные ножницы к автоматическому ткацкому станку | 1958 |
|
SU120162A1 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |
| Устройство для склеивания деталей | 1990 |
|
SU1745556A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Вертикальный накопитель для штучных грузов | 1983 |
|
SU1194788A1 |
| УСТРОЙСТВО для УКЛАДКИ в ПАКЕТ ЛИСТОВОГОМАТЕРИАЛА | 1972 |
|
SU337322A1 |
| Устройство для поштучной выдачи заготовок | 1973 |
|
SU500857A1 |