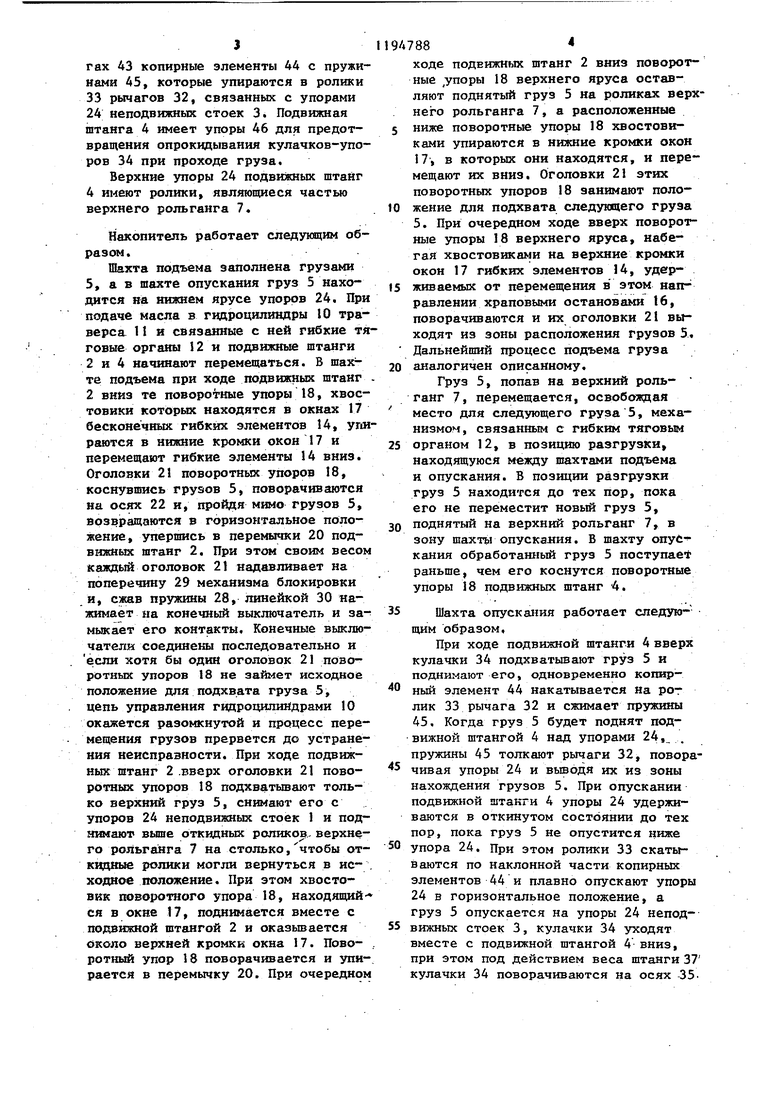
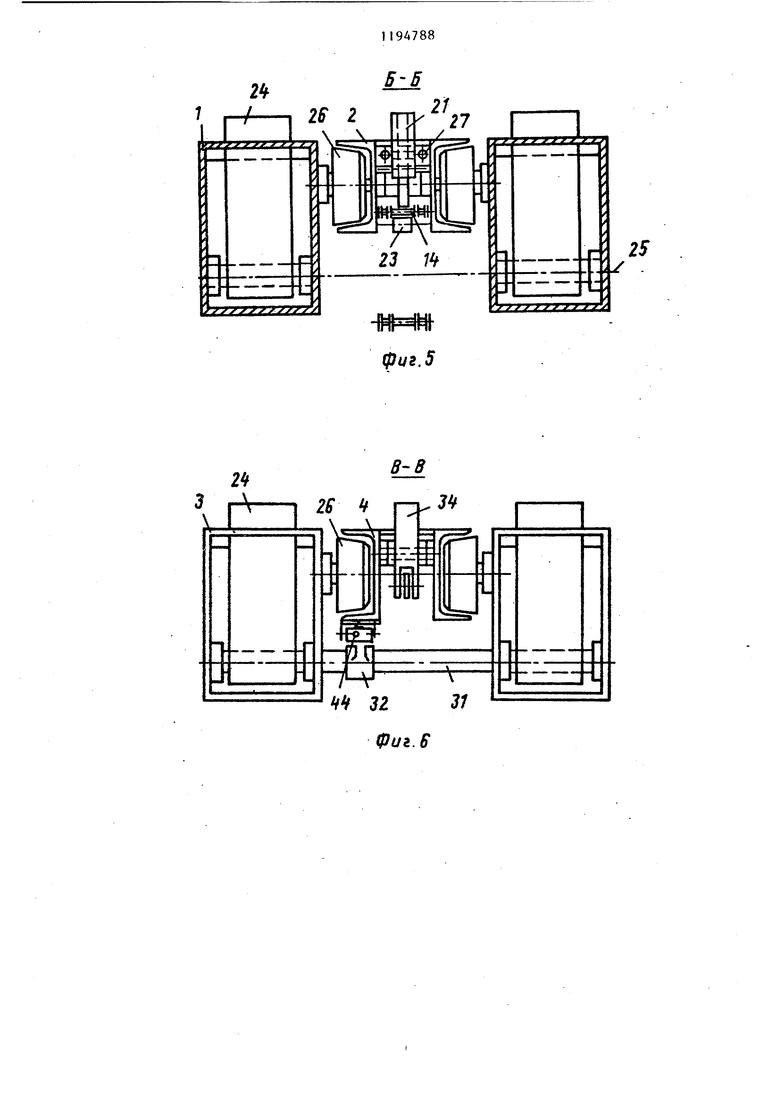
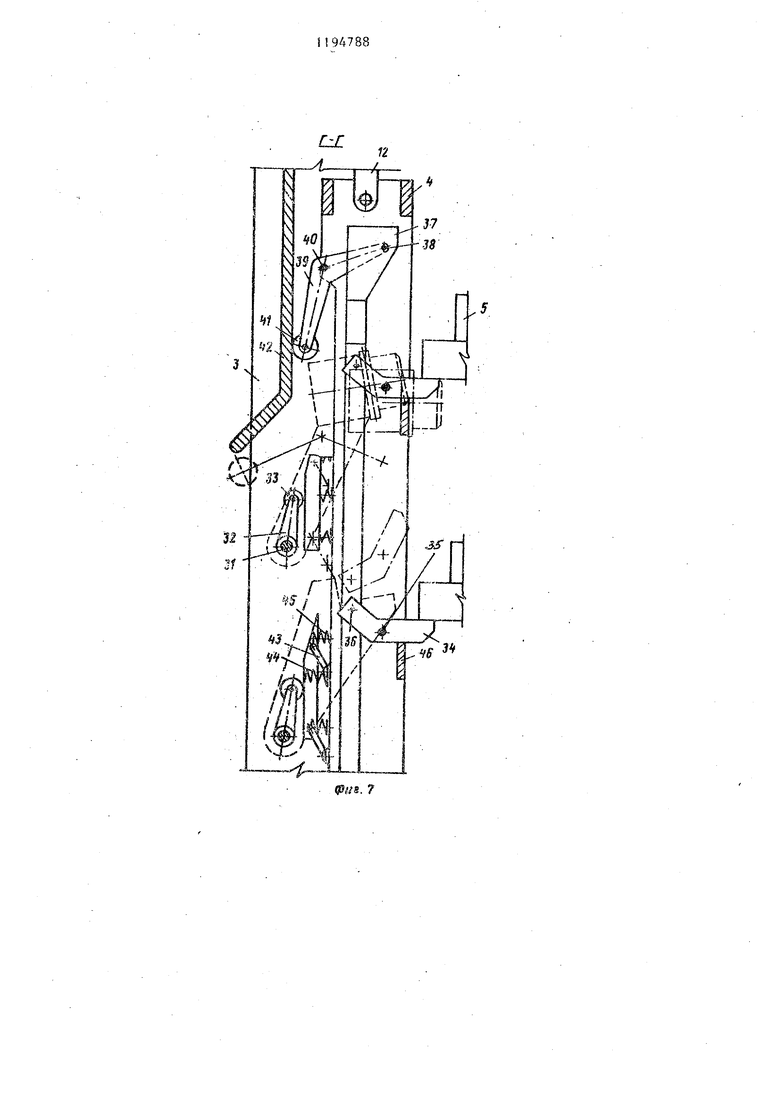
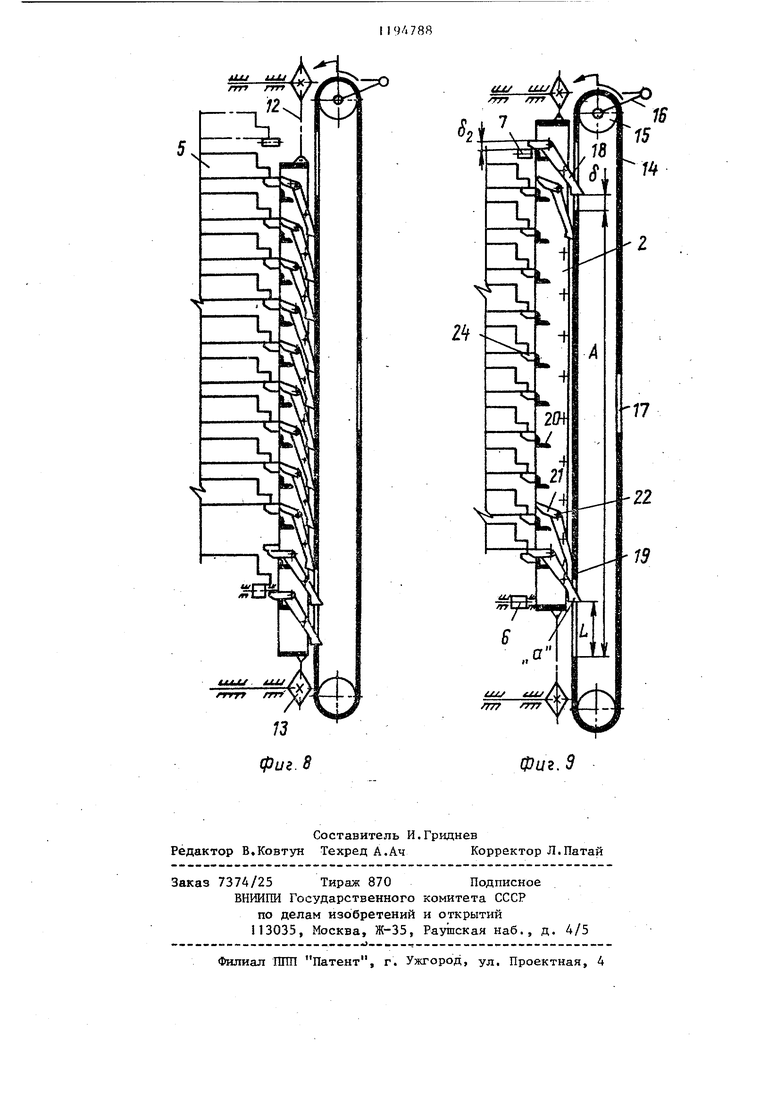
1 Изобретение относится к устройст вам для накопления в контейнерах штучных или насьтных грузов, например, к устройствам, загрузка и выгрузка материала в которых производится на разных уровнях. Цель изобретения - уменьшение энергоемкости устройства. На фиг.1 представлен вертикальны наполнитель для штучных грузов, общий вид; на фиг.2 - разрез А-А на фиг.1; на - узел 1 на фиг.2, в момент, когда подвижные штанги шахты подъема максимально опущены; на фиг.4 - узел Т на фиг.2 в момент когда подвижные штанги шахты подъема максимально подняты; на фиг.5 разрез В-Б на фиг.1; на фиг.6 - ра рез В-В на фиг.1; на фиг.7 - разрез Г-Г на фиг.1, на фиг.8 -положение упоров перед захватом груза с роль.Ганга; на фиг.9 - то же, после захв та. Вертикальный накопитель для штуч ных грузов включает шахту подъема, образованную нё подвижными стойками 1 и подвижными штангами 2, шахту опускания, образованную неподвижными стойками 3 и ПОДВ5ОКНЫМИ штанга ми 4, грузы (поддоны, контейнеры) 5 нижний рольганг 6 для передачи поддонов из шахты опускания на загрузку и далее в шахту подъема, верхн 1Й рольганг 7 для передачи груза из шахты подъема на разгрузку и далее в шахту опускания. В зонах шахт под ема и опускания верхний рольганг 7 имеет откидные ролики для пропускания груза 5 (не показаны). Концевые упоры 8 и 9 служат для останова груза 5 в нужном положении в шахтах подъема и опускания. Привод в виде гидроцилиндра 10 с траверсой 11, к которой прикреплены гибкие тяговые органы 12, например цепи, соединяющие между собой подвижные штанги 2 и 4 шахт подъема и опускания, перекинутые через блоки 13, служат для перемещения грузов 5 снизу вверх в шахте подъема и сверху вниз в шахте опускания, а также для передвижения грузов 5 по рольгангам 6 и 7. Бесконечные гибкие элементы 14, перекинутые через блоки 15 с храповыми остановами 16, имеют окна 17, в которые поочередно входят хвостовики выполненных в виде двуплечих рычагов поворотных упо 88 ров 18 подвижных штанг 2. Центр тяжести каждого поворотного упора 18 смещен относительно оси его качания 19, поэтому под действием силы тяmecTi. упоры 18 стремятся повернуться. Повороту их препятствуют либо хвостовики, упирающиеся вгибкий элемент 14, либо перемычки 20 подвижных штанг 2. Оголовок 21 поворотного упора 18 прикреплен к нему с помощью оси 22, что позволяет при ходе подвижной штанги 4 вниз оголовку 21 отклоняться и проходить мимо груза 5, а затем возвращаться в исходное положение под действием своего веса, ролики 23 воспринимают Д Шление со стороны хвостовиков поворотных упоров 18, которое передается на них через бесконечный гибкий элемент 14. Для удержания грузов 5 неподвижные стойки 1 и 3 имеют упоры 24, установленные с возможностью их вращения на осях 25. Двойные катки.26 служат для удержания и направления движения подвижных штанг 2 и 4. Механизм блокировки, включающий вертикальные тяги 27, подвешенные на пружинах 28, соединенные меядчу собой поперечинами 29, на которые ложатся оголовки 21 поворотных упоров 18 при их выходе в положение захвата груза 5, и линейку 30 конечных выключателей (не показаны), разрешает. подъем груза только в том случае, когда все четьфе поворотных упора 18 находятся в положении захвата груза. Минимальное количество окон 17 может быть равным трем. Шаг между окнами можеть быть равным шагу упоров 18 или больше этого шага. Неподвижные стойки 3 шахты опускания имеют упоры 24 с возможностью их вращения на осях 31. На последних находятся рычаги 32, имеющие на концах ролики 33. Каждая подвижная штанга 4 имеет кулачки-упоры 34 с возможностью их вращения на осях 35. Хвостовики всех кулачков 34 одной подвижной штанги 4 с помощью осей 36 соединены со штангой 37. Пальцем 218 штанга 37 соединена с одним концом коромысла 39, установленного на оси 40, а на втором конце коромысло 39 имеет ролик 41, упирающийся в копирную линейку 42, которая соединена с неподвижной стойкой 3. Каждая подвижная штанга 4 имеет сидящие на рича3
rax 43 копирные элементы 44 с пружинами 45, которые упираются в ролики 33 рычагов 32, связанных с упорами 24 неподвижных стоек 3. Подвижная штанга 4 имеет упоры 46 для предотвращения опрокидывания кулачков-упоров 34 при проходе груза.
Верхние упоры 24 подвижных штанг 4 имеют ролики, являющиеся частью верхнего рольганга 7«
1Накопитель работает следующим образом.
Шахта подъема заполнена грузами 5, а в шахте опускания груз 5 находится на нижнем ярусе упоров 24. При подаче масла в гвдроцилиндры 10 траверса 11 и связанные с ней гибкие тяговые органы 2 и подвижные штанги 2 и 4 начинают перемещаться. В шах те подъема при ходе подвижных штанг 2 вниз те поворотные упоры 18, хвостовики которых находятся в окнах 17 бесконечных гибких элементов 14, упираются в нижние кромки окон 17 и перемещают гибкие элементы 14 вниз. Оголовки 21 поворотных упоров 18, коснувшись грузов 5, поворачиваются на осях 22 и, пройдя мимо грузов 5, возвращаются в горизонтальное положение, упершись в перемычки 20 подВ14жных штанг 2. При этом своим весом каждый оголовок 21 надавливает на поперечину 29 механизма блокировки и, сжав пружины 28, линейкой 30 нажимает на конечный выключатель и замыкает его контакты. Конечные выключатели соединены последовательно и если хотя бы один оголовок 21 поворотных упоров 18 не займет исходное положение для подхвата груза 5, цепь управления гддроцилиИдрами 10 окажется разомкнутой и процесс перемещения грузов прервется до устранения неисправности. При ходе подвижных штанг 2 .вверх оголовки 21 поворотных упоров 18 подхватывают только верхний груз 5, снимают его с упоров 24 неподвижных стоек 1 и поднимают выше откидных роликов, верхнего рольганга 7 на столько,чтобы откидные ролики могли вернуться в исходное положение. При этом хвостовик поворотного упора 18, находящийся в окне 17, поднимается вместе с подвижной штангой 2 и оказывается около верхней кромки окна 17. Поворотный упор 18 поворачивается и упирается в перемычку 20. При очередном
788
ходе подвижных штанг 2 вниз поворотные ,упоры 18 верхнего яруса оставляют поднятый груз 5 на роликах верхнего рольганга 7, а расположенные
ниже поворотные упоры 18 хвостовиками упираются в нижние кромки окон 17, в которых они находятся, и перемещают их вниз. Оголовки 21 этих поворотных упоров 18 занимают положение для подхвата следующего груза 5. При очередном ходе вверх поворотные упоры 18 верхнего яруса, набегая хвостовика 1и на верхние кромки окон 17 гибких элементов 14, удерживаемых от перемещения в этом направлении храповыми остановами 16, поворачиваются и их оголовки 21 выходят из зоны расположения грузов 5. Дальнейший процесс подъема груза
аналогичен описанному.
Груз 5, попав на верхний роль- Ганг 7, перемещается, освобождая место для следующего груза 5, механизмом, связанным с гибким тяговым
органом 12, в позицию разгрузки, находящуюся между шахтами подъема и опускания. В позиции разгрузки груз 5 находится до тех пор, пока его не переместит новый груз 5,
поднятый на верхний рольганг 7, в зону шахты опускания. В шахту опуйкания обработанный груз 5 поступает раньше, чем его коснутся поворотные упоры 18 подвижных штанг 4.
Шахта опускания работает следующим образом.
При ходе подвижной штанги 4 вверх кулачки 34 подхватывают груз 5 и поднимают его, одновременно копир-
ный элемент 44 накатывается на рот лик 33 рычага 32 и сжимает пружины 45. Когда груз 5 будет поднят подвижной штангой 4 над упорами 24, , пружины 45 толкают рычаги 32, поворачивая упоры 24 и выводя их из зоны нахождения грузов 5. При опускании подвижной штакги 4 упоры 24 удерживаются в откинутом состоянии до тех пор, пока груз 5 не опустится ниже
упора 24. При этом ролики 33 скатываются по наклонной части копирных элементов 44 и плавно опускают упоры 24 в горизонтальное положение, а груз 5 опускается на упоры 24 неподвижных стоек 3, кулачки 34 уходят вместе с подвижной штангой 4 вниз, при этом под действием веса штанги 37 кулачки 34 поворачиваются на осях 35
51
и выходят из зоны зацепления груза. При новом ходе вверх подвижной штанги 4 кулачки 34 проходят мимо расположенного на упорах 24 груза 5 до тех пор, пока ролик 41 коромысла 39 не накатывается на копирную линейку 42, При этом коромысло 39 поворачивается на оси 40, поднимает штангу 37 и вводит кулач{си 34 в зону расположения грузов 5. Кулачки 34 подхватьгоают груз 5 снгшают с упоров 24 неподвижных стоек 3и цикл повторяется вновь.
Таким образом, поштучный подъем грузов позволяет уменьшить материалоемкость механизма их перемещения, при этом появляется возможность уве94788
личить высоту накопителя и вес груза IB шахте, используя выпускаемые про;мьшшенные тяговые элементы, уменьшаются размеры приводных устройств, уп5 рощае.гея конструкция системы контроля захвата груза.
Накопитель одновременно с вьтолнением своей основной функции может быть использован в качестве грузо 10 подъемного устройства. При этом поштучный характер подъема груза мало влияет на его производительность, так как время перемещения всех поддонов в шахте подъема на один шаг
15 обычно не превьш1ает времени, необходимого для загрузки или разгрузки поддона .(2-3 мин) ,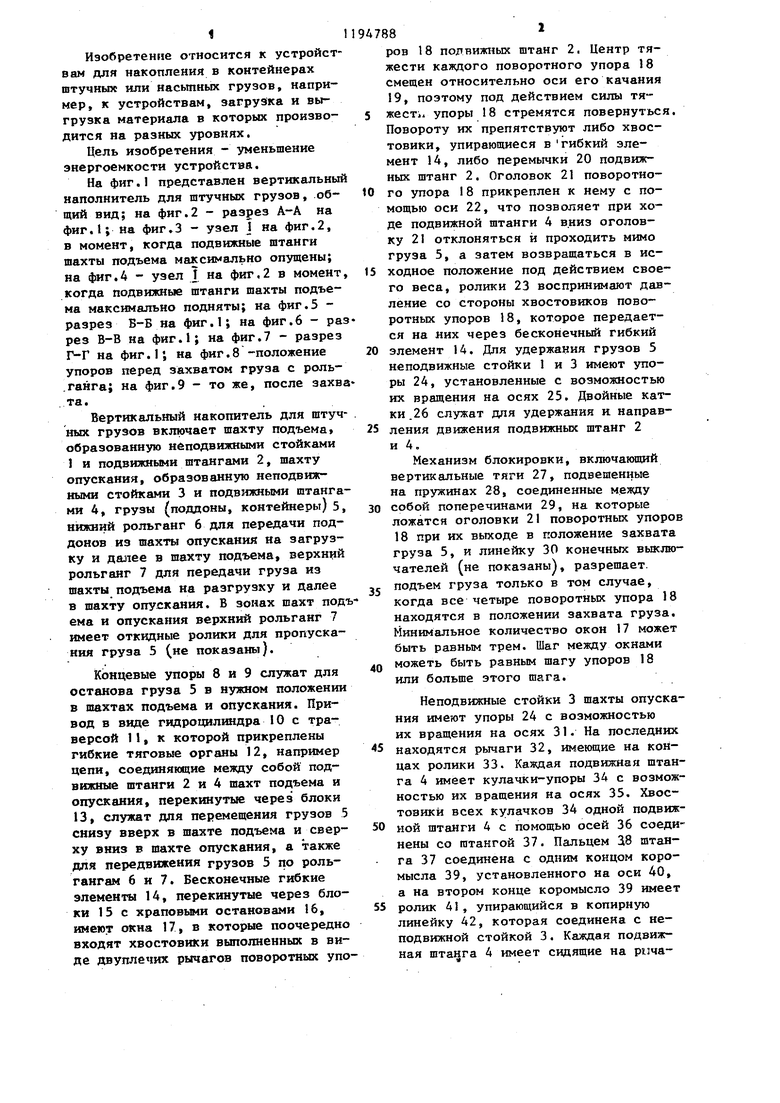

| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |
| Вертикальный накопитель для штучных грузов | 1979 |
|
SU901170A1 |
| Вертикальный накопитель для штучных грузов | 1985 |
|
SU1303504A1 |
| Вертикальный накопитель для штучных грузов | 1984 |
|
SU1181952A1 |
| Вертикальная сушильная установка контейнерного типа | 1983 |
|
SU1106968A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Устройство для хранения и транспортирования штучных изделий | 1978 |
|
SU745793A1 |
| Устройство для вертикального штабелирования и разборки штабеля штучных грузов | 1977 |
|
SU735531A1 |
| Погрузочно-разгрузочное окно шахты вертикального многокабинного конвейера | 1980 |
|
SU926206A1 |
ВЕРТИКАЛЬНЫЙ НАКОПИТЕЛЬ ДЛЯ ШТУЧНЫХ ГРУЗОВ, содержащий по крайней мере одну шахту с вертикально расположенными штангамн для подъема грузов, одни из которых смонтированы с возможностью вертикального перемещения, расположенные по высоте штанг поворотные упоры для подхвата и удержания грузов, и приспособление для управления поворотом упоров подвижных штанг, о тличающийс я тем, что, с целью уменьшения энергоемкости, приспособление для управления поворотом упоров подвижных штанг содержит вертикально расположенные замкнутые гибкие элементы, огибающие установленные в зоне концов подвижных штанг блоки с храповыми остановами и выполненные с расположенными вдоль них окнами, а упоры представляют собой двуплечие рычаги, смонтированные на подвижных штангах с возможностью взаимодействия одним плечом с грузом, а другим - с возможностью захода в окна гибких элемен(/) тов и взаимодействия с расположенными одна над другой кромками окон.
Ч
фиг./
П.
fpui. 3
Cpui,
2
Б6
Фиъ.В
| Вертикальный накопитель для штучных грузов | 1979 |
|
SU901170A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
