1
Изобретение применяется в автоматических линиях с программным управлением для нанесения защитных покрытий на детали автомобилей.
Известен автооператор для гальванических автоматов, содержащий станину, подвижный корпус, на котором размещены приводы вертикального и горизонтального перемещений, к которым через блок программирования подключен захватный орган.
Однако автооператоры такого типа обладают рядом существенных недостатков, к которым относится возникновение значительных инерционных сил при резкой остановке и трогании с места подвижной части, что приводит в общем к ограничению производительности оператора и линии в целом.
Цель изобретения - упрощение конструкции и повышение надежности устройства.
Это достигается тем, что блок программирования размещен на подвижном корпусе автооператора и содержит узел адресователей, соединенный с барабаном блока программирования, а на станине установлены клиновые копиры торможения, размещенные в местах остановки оператора на линии движения адресователей.
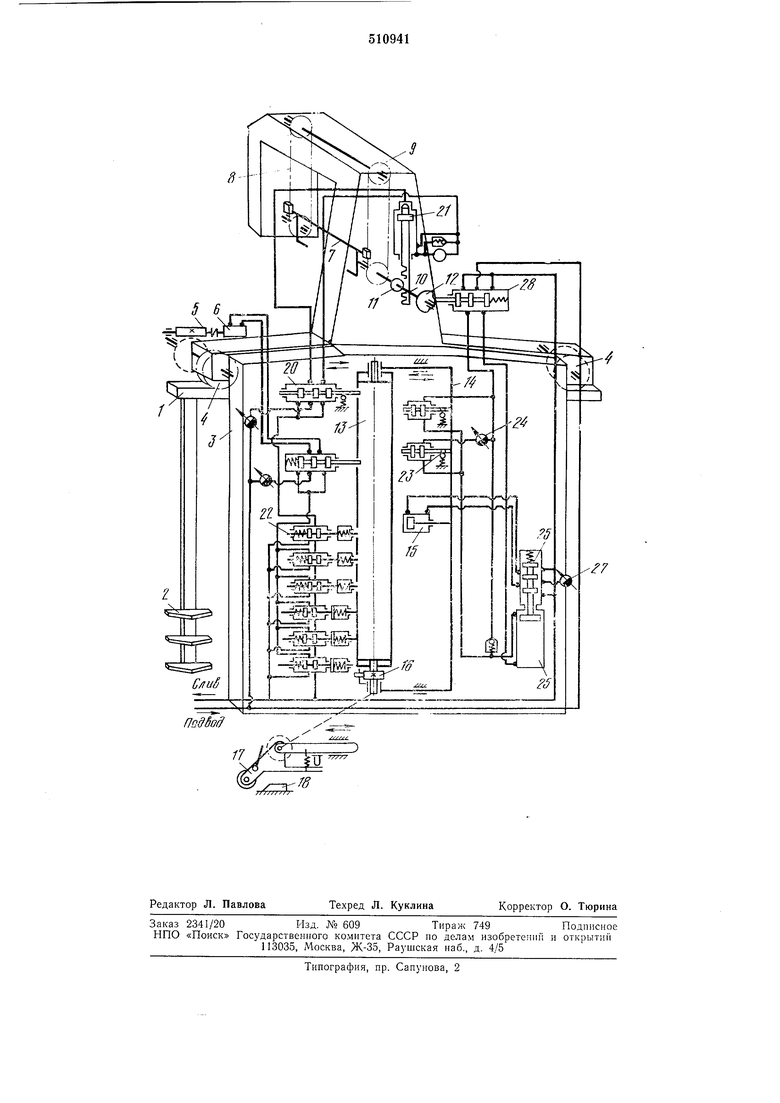
На чертенке представлена гидрокинематическая схема оператора.
Автооператор содержит неподвижную часть - станину 1 с ходовыми путями, на которой в местах остановки располол ены клиновые копиры 2.
Подвижная часть оператора состоит из корпуса 3, опирающегося на катки 4, причем один из пих ведущий, связанный через червячную передачу 5 с гидромотором 6 - приводом горизонтального перемещения, захватного органа траверсы 7 для подъема и опускания подвесок и барабанов, закрепленных на цепях 8, связанных со звездочками 9. На приводном валу 10 траверсы 7 размещены щестерня 11 и копир 12.
Программа работы aiBTOonepaTopa записывается в блоке программирования, содержащем барабан 13, который своими опорами вставляется в направляющие траверсы 14. Гидроцилиндр 15, щток которого связан с траверсой 14, осуществляет возвратно-поступательное перемещение барабана 13, на нижней опоре которого расположен храповый механизм 16, взаимодействующий с водилом 17 и упором 18, расположенным на корпусе 3 подвижной части оператора.
С левой стороны программного барабана размещаются золотник 19 гидромотора 6, золотник 20 управления вертикального при3
вода гидроцилиндра 21 иодъема is опускания, шесть золотников 22 узла адресователей.
С правой стороны программного барабана установлены золотники 23, дроссель 24 выдержки времени, реле времени 25, управляющее золотником 26 перемещения гидроцилиндра 15, дроссель 27, регулирующий скорость гидроцилиндра 15. Золотилк 28 от копира 12 управляет перемещением порщня реле времени.
Работа автооператора происходит следующим образом.
От насосной станции масло юдводится к золотнику 19 и через него к гидромотору 6. Переключение золотника 19 осуществляется программным барабаном 13.
Если /программный барабан находится в левом положении, то три из щести золотников адресователей находятся в крайнем левом лоложении и тем самым обеспечивают слив масла от золотника 19 в сливную магистраль. Гидромотор 6 при этом вращается и происходит перемещение автооператора (ПО схеме оправа налево).
Через золотник 20 масло подводится к гидроцилиндру 21, но подъема траверсы 7 не происходит, так как слив масла из штоковой полости гидроцилиндра 21 перекрыт тремя НИЖНИМИ золотниками 22 узла адрееователей. При движении оператора выдвинутые влево золотники узла адресователя встречаются с клиновыми коиирами 2 и плавно передвигаются вправо, иерекрывая слив масла, и автооператор останавливается.
В крайнем правом лоложении золотники 22 открывают -слив гидроцилиндра 21, и происходит подъем траверсы 7. Копир 12 при этом передвигает золотник в крайнее правое положение, и масло попадает в верхнюю .полость реле времени 25. Порщень реле времени опускается вниз, золотник 26 передвигается в нижнее положение, и масло поступает через дроссель 27 в бесщтоковую полость гидроцилиндра 15, в результате чего барабан 13 передвигается
4
вправо, воздействуя на золотник 23 выдержки времени.
По окончании подъема траверсы 7 копир 12 занимает исходное положение, а золотник 28 - левое положение, и масло поступает в нижнюю полость реле времени 25.
Порщень реле времени поднимается вверх со скоростью, которую ему обеспечивает дроссель 24, включенный золотнпком 23.
При отсутствии необходимости в выдержке масло подается через другой золотник 23, у которого дроссель отсутствует. Золотников 23 и дросселей 24 может быть несколько (ири необходимости различных выдержек времени).
В верхнем положении лорщень реле времени включает золотниК 26, и масло через дроссель 27 подводится к щтоковой полости гидроцилиндра 15. Программный барабан 13 возвращается в крайнее левое положение с новой программой, траверса 14 переводит в левое положение золотник 23.
Программный барабан 13 в левом положении выдвигает влево три других золотника узла адресователя, включает золотники гидромотора 6 и гидроцилиндра подъема и опускания на новую программу.
Затем весь цикл повторяется.
,
Формула изобретения
Автоонератор для гальванических автоматов, содержащий станину, подвижный корпус, на котором размещены приводы
вертикального и горизонтального перемещений, к которым через блок программирования подключен захватный орган, о тл и чающийся тем, что, с целью упрощения конструкции и повыщения надежности устройства, блок программирования размещен на подвижном корпусе автооператора и содержит узел адресователей, соединенный с барабаном блока программирования, а на станине установлены клиновые копиры торможения, размещенные в местах остановки оиератора на «тинии движения адресователей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электровысадочный автомат | 1979 |
|
SU829294A1 |
| Гидрокопировальный резьботокарный станок | 1985 |
|
SU1313601A1 |
| Машина для контактной стыковой сварки | 1982 |
|
SU1103971A1 |
| СПОСОБ ОТМЕРА ДЛИН СОРТИМЕНТОВ ПРИ РАСКРЯЖЕВКЕ ХЛЫСТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2005591C1 |
| Система автоматической подачи кабеля в рабочий орган самоходного кабелеукладчика | 1988 |
|
SU1717743A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |
| Следящая система управления рабочим органом землеройной машины | 1981 |
|
SU962483A1 |
| Устройство для изготовления сильфонов | 1974 |
|
SU978975A1 |
| Автоматический формовочный агрегат | 1990 |
|
SU1827347A1 |
| Стенд для испытания самоходных корнеклубнеуборочных машин и имитатор нагрузок на копатели корнеклубнеуборочных машин | 1982 |
|
SU1092370A1 |