(54) ПЕРЕНОСНАЯ МОТОРНАЯ ПИЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Переносная моторная пила | 1976 |
|
SU905072A1 |
| Переносная моторная пила | 1976 |
|
SU649573A1 |
| Переносная моторная пила | 1976 |
|
SU606721A1 |
| Переносная моторная пила | 1980 |
|
SU885012A1 |
| Переносная моторная пила | 1975 |
|
SU520245A1 |
| Переносная моторная пила | 1981 |
|
SU939188A1 |
| Переносная моторная пила | 1974 |
|
SU512054A1 |
| Переносная моторная пила | 1982 |
|
SU1073092A1 |
| Переносная моторная пила | 1986 |
|
SU1323385A1 |
| Переносная моторная пила | 1977 |
|
SU666078A1 |
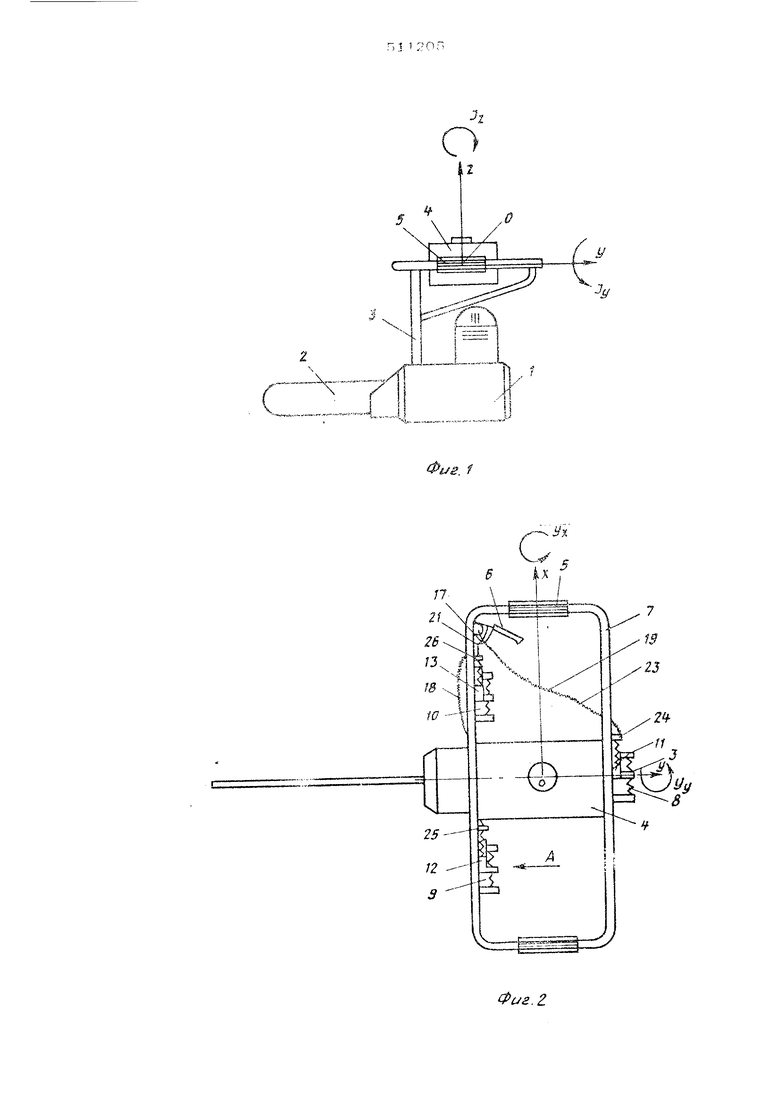
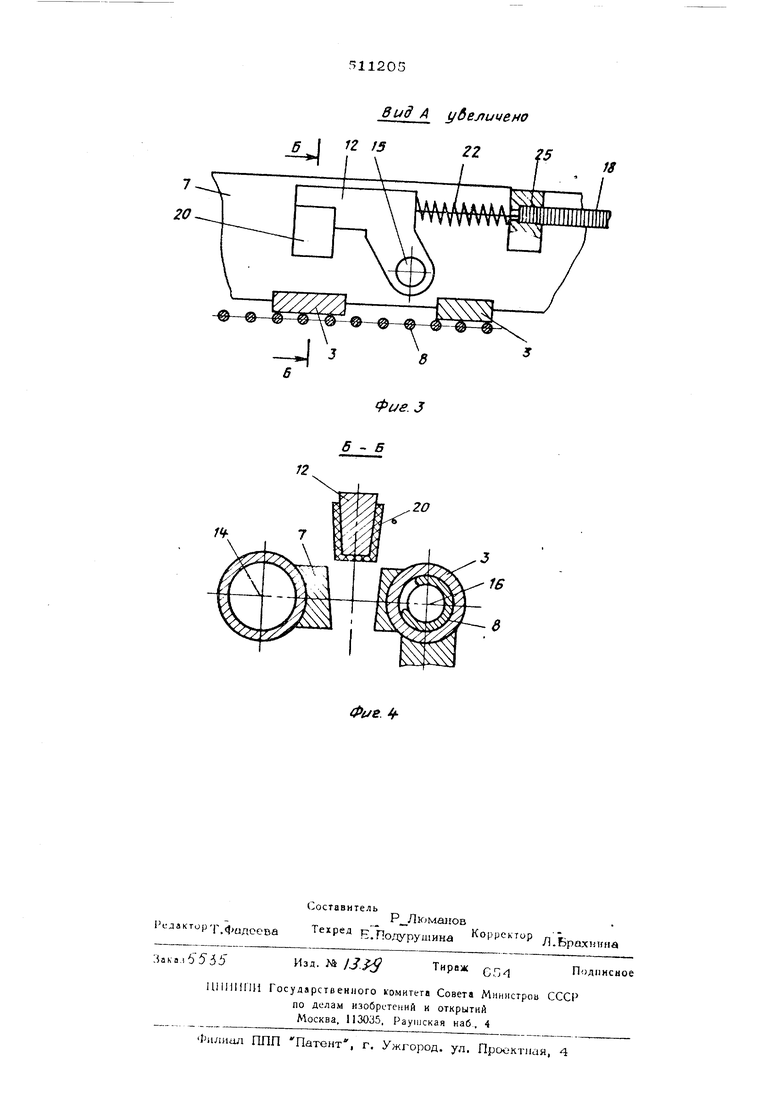
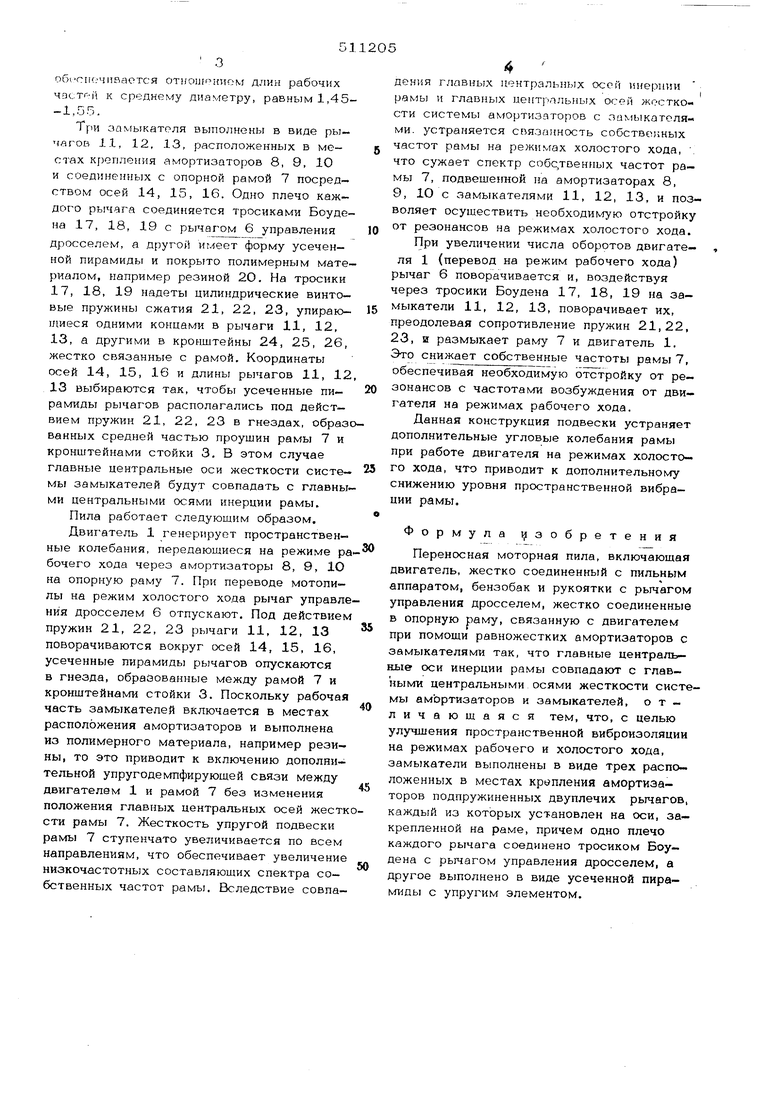
Изобретение относится к ручным механизированным инструментам и может быть использовано в лесной и деревообрабатыва щей промышленности. Известна моторная пила, включающая двигатель, жестко соединенный с пильным аппаратом, бензобак и рукоятки с рычагом управления дросселем, жестко соединенные в опорную раму, связанную с двигателем при помоши равножестких амортизаторов с замыкателями так, что главные цент ральные оси инерции совпадают с главными центральными осями жесткост системы амортизаторов и замыкателей. Цель изобретения - улучшить простраиственную виброизоляцию на режимах рабочего и холостого хода. Для этого замыкатели выполнены в виде трех, расположенных в местах крепления амортизаторов подпружиненных двуплечих рычагов, каждый из которЬХ установлен на оси, закрепленной на раме, причем одно плечо каждого соедк 1ено тросиком Боудена г рычагом управления дросселем, а другое- выполнено и видс- усеченной пирамиды, покрытой упругим элементом. На фиг. 1 изобра сена предлагаемая пила, обший вид; на фиг. 2 - то лче, в плане; на фиг. 3 дан вид по стрелке А на фиг. 2; на фиг. 4 - сечение по Б-Б на фиг. 3. MoTOini.na состоит из двигателя 1 с жестко соодг.ийниым пильным аппаратом 2 и сто11кой 3. Бонзобак 4 и рукоятки 5, распо:1ОЖ1Нные cnMNieTjjHHHO оси ОУ, с.ры--нагом С) управления дросселем жестко со(:-ди1(НЬ1 в опорную раму 7. Рама 7 связана со СТОЙКО 3 тремя одинаковыми ахгортизаторами 8, 9, 10 так, что главные центральные ocvi ;;)1орции рамы , Jv- , 2 совпада от с глгпгными центральными осями жесткости сист-с-мы а юртизаторов ОХ, Oy,,OZ . Каждый из амортизаторов 8, 9, 10 Hbinoaiici; (.швиоячостким в виде цилиндрической иинтоьой пруж1П1ы, уста-ановленн.ой бсЗ натяга, концовыо зитки которой жестко :1крог1ле 1ы в проушинах рамы 7, а С1;.-дм;1и в К{1онигг.йи, cTOii- 3. PaiiHiiM ,.(.:ть nMOjjiiKviTOpob
3 обспи-чиваотся отношенном длин рабочих чэст(й к среднему диаметру, равным 1,45-1,55. Три замыкателя выполнены в виде рычагов 11, 12, 13, расположенных в ме- стах крепления амортизаторов 8, 9, 1О и соединенных с опорной рамой 7 посредством осей 14, 15, 16. Одно плечо каждого рычага соединяется тросиками Боудена 17, 18, 19 с рычагом 6 управления дросселем, а другой имеет форму усеченной пирамиды и покрыто полимерным материалом, например резиной 20. На тросики 17, 18, 19 надеты цилиндрические винтовые пружины сжатия 21, 22, 23, упирающиеся одними концами в рычаги 11, 12, 13, а другими в кронштейны 24, 25, 26, жестко связанные с рамой. Координаты осей 14, 15, 16 и длины рычагов 11, 12 13 выбираются так, чтобы усеченные пирамиды рычагов располагались под действием пружин 21, 22, 23 в гнездах, образ ванных средней частью проушин рамы 7 и кронштейнами стойки 3, В этом случае главные центральные оси жесткости систе мы замыкателей будут совпадать с главны ми центральными осями инерции рамы. Пила работает следующим образом. Двигатель 1 генерирует пространственные колебания, передающиеся на режиме ра бочего хода через амортизаторы 8, 9, Ю на опорную раму 7. При переводе мотопилы на режим холостого хода рычаг управл ния дросселем 6 отпускают. Под действием пружин 21, 22, 23 рычаги 11, 12, 13 поворачиваются вокруг осей 14, 15, 16, усеченные пирамиды рычагов опускаются в гнезда, образованные между рамой 7 и кронштейнами стойки 3. Поскольку рабочая часть замыкателей включается в местах расположения амортизаторов и выполнена из полимерного материала, например резины, то это приводит к включению дополнительной упругодемпфируюшей связи между двигателем 1 и рамой 7 без изменения положения главных центральных осей жест сти рамы 7. Жесткость упругой подвески рамы 7 ступенчато увеличивается по всем направлениям, что обеспечивает увеличение низкочастотных составляющих спектра собственных частот рамы. Вследствие совпа4дения главных центральных осей HHepiuiH рамы и главных центральных осей жесткости системы амортизаторов с замыкателями, устраняется сн язаиность собствокных частот рамы на режимах холостого хода, . что сужает спектр собственных частот рамы 7, подвешенной на амортизаторах 8, 9, 10 с замыкателями 11, 12, 13, и позволяет осуществить необходимую отстройку от резонансов на режимах холостого хода. При увеличении числа оборотов двигателя 1 (перевод на режим рабочего хода) рычаг 6 поворачивается и, воздействуя через тросики Боудена 17, 18, 19 на замыкатели 11, 12, 13, поворачивает их, преодолевая сопротивление пружин 21,22, 23, и размыкает раму 7 и двигатель 1. Это снижает собственные частоты рамы 7, обеспечивая необходимую отстройку от резонансов с частотами возбуждения от двигателя на режимах рабочего хода. Данная конструкция подвески устраняет дополнительные угловые колебания рамы при работе двигателя на режимах холостого хода, что приводит к дополнительному снижению уровня пространственной вибрации рамы. Формула { зобретения Переносная моторная пила, включающая двигатель, жестко соединенный с пильным аппаратом, бензобак и рукоятки с рычагом управления дросселем, жестко соединенные в опорную раму, связанную с двигателем при помощи равножестких амортизаторов с замыкателями так, что главные центральные оси инерции рамы совпадают с главными центральными осями жесткости системы амортизаторов и замыкателей, отличающаяся тем, что, с целью улучшения пространственной виброизоляции на режимах рабочего и холостого хода, замыкатели выполнены в виде трех расположенных в местах крепления амортизаторов подпружиненных двуплечих рычагов, каждый из которых установлен на оси, закрепленной на раме, причем одно плечо каждого рычага соединено тросиком Боу- дена с рычагом управления дросселем, а другое выполнено в виде усеченной пирамиды с упругим элементом.
/
JI %
ггг:: :
Ж
Фиё 1
sv.
:zir: izr
Фиг. г
вид А убеличеио
146 - Б
д
fPue
