(54) ПЕРЕНОСНАЯ МОТОРНАЯ ПИЛА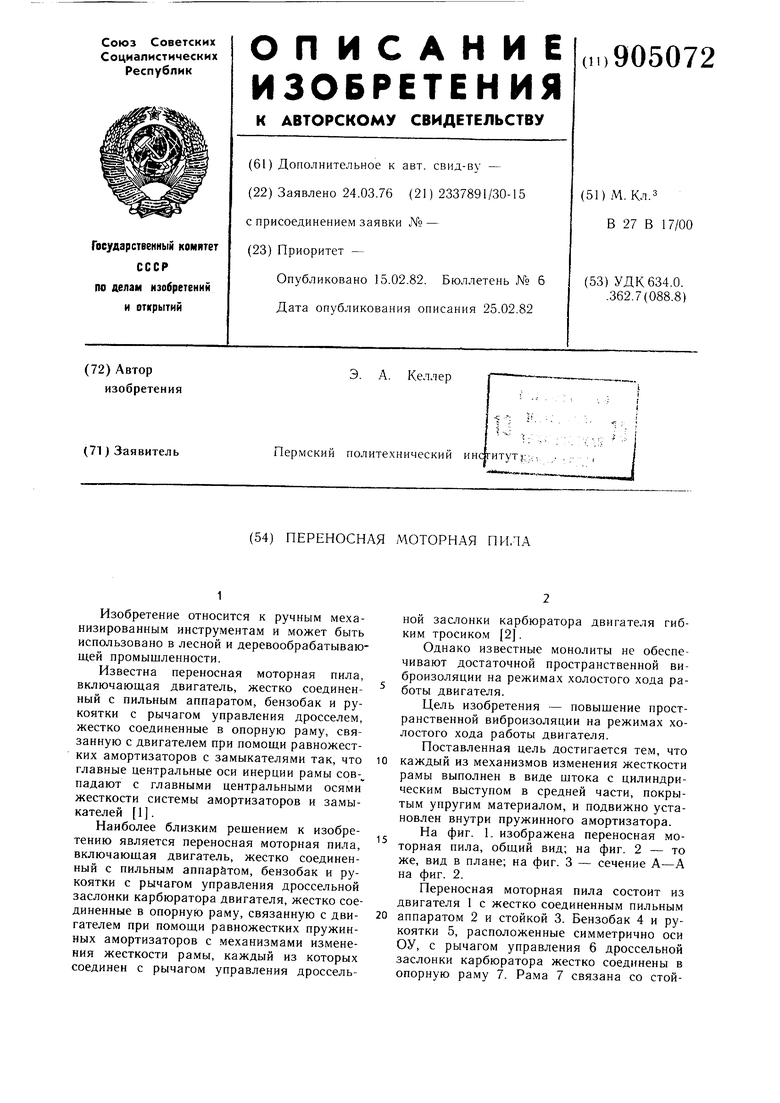

| название | год | авторы | номер документа |
|---|---|---|---|
| Переносная моторная пила | 1980 |
|
SU885012A1 |
| Переносная моторная пила | 1981 |
|
SU939188A1 |
| Переносная моторная пила | 1976 |
|
SU649573A1 |
| Переносная моторная пила | 1976 |
|
SU606721A1 |
| Переносная моторная пила | 1974 |
|
SU511205A1 |
| Переносная моторная пила | 1978 |
|
SU674897A1 |
| Переносная моторная пила | 1980 |
|
SU939187A1 |
| Переносная моторная пила | 1977 |
|
SU666078A1 |
| Переносная моторная пила | 1982 |
|
SU1027029A2 |
| Переносная моторная пила | 1975 |
|
SU520245A1 |
1
Изобретение относится к ручным механизированным инструментам и может быть использовано в лесной и деревообрабатывающей промышленности.
Известна переносная моторная пила, включающая двигатель, жестко соединенный с пильным аппаратом, бензобак и рукоятки с рычагом управления дросселем, жестко соединенные в опорную раму, связанную с двигателем при помощи равножестких амортизаторов с замыкателями так, что главные центральные оси инерции рамы совпадают с главными центральными осями жесткости системы амортизаторов и замыкателей 1.
Наиболее близким решением к изобретению является переносная моторная пила, включающая двигатель, жестко соединенный с пильным аппаратом, бензобак и рукоятки с рычагом управления дроссельной заслонки карбюратора двигателя, жестко соединенные в опорную раму, связанную с двигателем при помощи равножестких пружинных амортизаторов с .механизмами изменения жесткости рамы, каждый из которых соединен с рычагом управления дроссельной заслонки карбюратора двигателя гибким тросиком 2.
Однако известные монолиты не обеспечивают достаточной пространственной виброизоляции на режимах холостого хода работы двигателя.
Цель изобретения - повышение пространственной виброизоляции на режимах холостого хода работы двигателя.
Поставленная цель достигается тем, что каждый из механизмов изменения жесткости рамы выполнен в виде штока с цилиндрическим выступом в средней части, покрытым упругим материалом, и подвижно установлен внутри пружинного амортизатора.
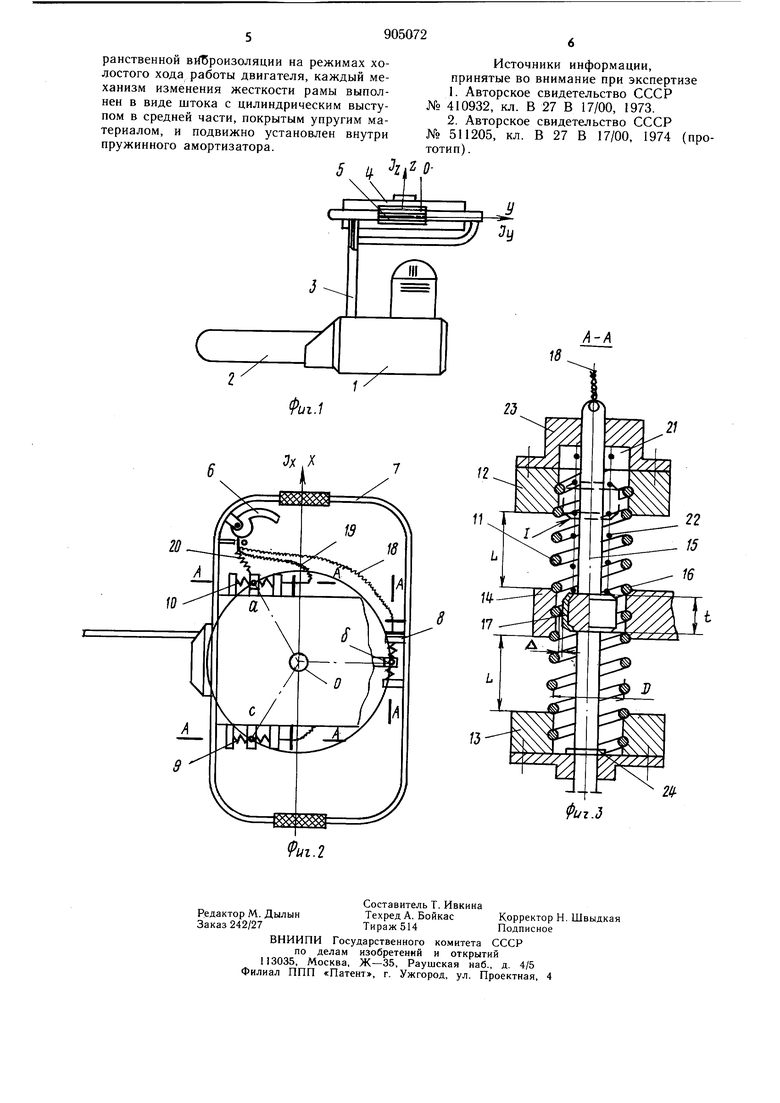
На фиг. 1. изображена переносная моторная пила, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - сечение А-А на фиг. 2.
Переносная моторная пила состоит из двигателя 1 с жестко соединенным пильным 20 аппаратом 2 и стойкой 3. Бензобак 4 и рукоятки 5, расположенные симметрично оси ОУ, с рычагом управления 6 дроссельной заслонки карбюратора жестко соединены в опорную раму 7. Рама 7 связана со стойкой 3 тремя одинаковыми амортизаторами 8-10 так, что главные центральные оси инерции рамы 3, Зи, z совпадают с главными центральными осями жесткости системы амортизаторов ОХ, ОУ, OZ. Продольные оси амортизаторов 9 и 10 расположены параллельно оси ОУ, а амортизатора 8 - перпендикулярно этой оси. Каждый из амортизаторов 8-10 выполнен равножестким в виде цилиндрической винтовой пружины 11, установленной без натяга, концевые витки которой жестко закреплены в проушинах 12 и
13 рамы, а средние - в кронштейне 14 стойки 3. Равная жесткость амортизаторов обеспечивается отношением длин L рабочих частей пружин к среднему диаметру D, равным 1,45-1,55. Каждый из трех механизмов изменения жесткости рамы выполнен в виде штоков 15 с цилиндрическим выстуном 16 в средней части, покрытым упругим материалом 17, например резиной, и подвижно установлен внутри пружинного амортизатора. Концы штоков соединяются гибкими тросиками 18, 19 и 20 с рычагом 6 управления дроссельной заслонки карбюратора. Между цилиндрической поверхностью выступа 16 и внутренней поверхностью пружины 11 выполняется расчетный зазор А. Длина t выступа 16 выполняется равной толшине кронштейна 14 или меньшей ее. В проушине 12 образуется полость 21, в которую помешается пружина сжатия 22, упираюшаяся одним концом в торец выступа 16, а другим - в крышку 23 проушины 12. Глубина полости 21 выполняется так, чтобы в одном из крайних положений штока 15 торец выступа 16 не выходил за пределы проушины 12 рамы. Ход штока 15 ограничивается буртиком 24 и выполняется равным L + t.
Устройство работает следуюшим образом.
Двигатель 1 генерирует пространственные колебания, передающиеся на режиме рабочего хода через амортизаторы 8-10 на опорную раму 7. Совмещение главных центральных осей инерции рамы Uj, Пи, UjC главными центральными осями жесткости ОХ, ОУ, OZ системы амортизаторов и равная жесткость амортизаторов приводят к устранению связанности колебаний рамы, сужению спектра собственных частот системы и ее отстройки от резонансов с основной частотой возбуждения от двигателя, что обеспечивает эффективную пространственную виброизоляцию рукояток на режиме рабочего хода. При переводе мотопилы на режим холостого хода рычаг 6 управления дроссельной заслонки карбюратора опускают. Под действием пружин 22 штоки 15 каждого амортизатора перемещаются относительно проушин 12 и 13 вдоль оси амортизатора до упора буртика 24 в торец проушины 13. При этом цилиндрический выступ 16 располагается посредине кронштейна 14. Под действием веса двигателя кронштейн 14 стойки 3 смещается вниз. При этом зазоры Д выбираются и средние витки пружин 11 приходят в соприкосновение с выступами 16. Поскольку рабочая часть штоков включается в серединах амортизаторов и покрыта упругим материалом, то это приводит к включению дополнительной упругодемпфирующей связи между двигателем -1 и рамой 7 без изменения положения главных центральных осей жесткости системы амортизаторов. Расположение осей амортизаторов 9 и 10 перпендикулярно оси амортизатора 8 позволяет ступенчато увеличить суммарную жесткость упругой подвески рамы 7 по всем направлениям, увеличить собственные частоты системы и отстроить раму от резонансов с основной частотой возбуждения от двигателя на режиме холостого хода. Перемещение средних витков пружин 11 относительно цилиндрических поверхностей выступов 16 приводит к рассеиванию энергии колебаний на работу сил трения, что позволяет снизить резонансные амплитуды колебаний рамы и дополнительно снизить амплитуды пространственных колебаj НИИ рамы на режиме холостого хода. При увеличении числа оборотов двигателя 1 (перевод на режим рабочего хода) рычаг 6 дроссельной заслонки карбюратора поворачивается и, воздействуя через тросики 18, 19 и 20 на штоки 15, перемещает их по оси пружин 11, преодолевая сопротивление пружин 22 и размыкая раму 7 и двигатель 1. Поскольку перемещение щтока равно L + t, то дополнительная упруго-демпфирующая связь полностью выключается, а пространственная жесткость подвески ступенчато уменьшается, обеспечивая эффективную пространственную виброизоляцию рамы на режиме рабочего хода.
Кроме того, равномерное распределение 0 нагрузки на каждый замыкатель уменьшает их износ и выполнение штоками 15 функций ограничителей перемещения рамы при поломках пружин 11, что повышает надежность виброизолирующей системы.
Формула изобретения
Переносная моторная пила, включающая двигатель, жестко соединенный с пильным аппаратом, бензобак и рукоятки с рычагом управления дроссельной заслонки карбюратора двигателя, жестко соединенные в опорную раму, связанную с двигателем при помощи равножестких пружинных амортизаторов с механизмами изменения жесткости рамы, каждый из которых соединен с рычагом управления дроссельной заслонки карбюратора двигателя гибким тросиком, отличающаяся тем, что, с целью повышения прост
