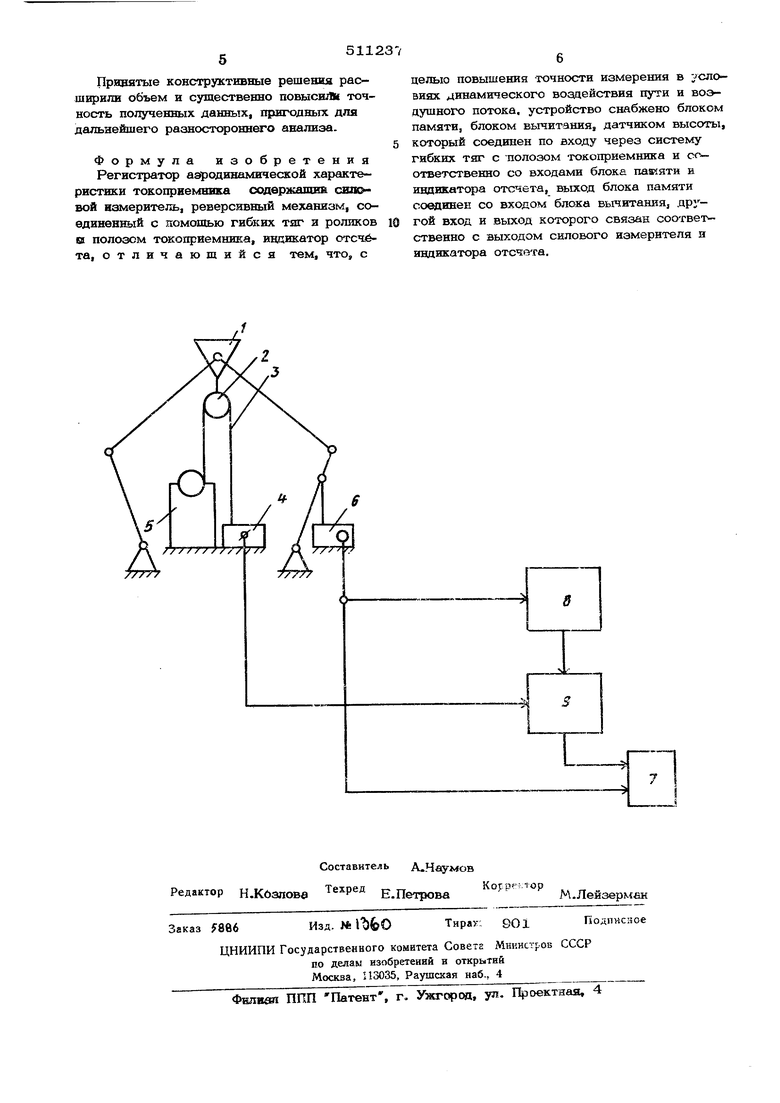
к одному иа регистргфуюпшх входов инцикатора 7. Силовой измеритель подключен к индик тору через блок вычитания 9, Причем на вход вычитаемого подключен блок памя ти 8, а на вход уменьшаемого - выход силового измерителя 4, Фиксируемая в процессе измерений характеристика вьфажает изменение аэродин мических сил, воЕдейств тошвх на токоприе ник, Б зависимости от высоты прложений полоза. Известно, что на полоз в процессе рабо ты действуем- одновременно несколько сил: силы трениЯз развивающиеся в шарнирных сочленениях рамы токоприемника; силы осн к,1х рабочих пружин подъема токоприемник и силы воацействия потока воздуха. Все эти силы непостоянны и изменяютс в зависимости от изменения высоты подьема токоприемника, что затрудняет выявле характера водцействия на последний воздушных масс. В устройстве благодаря блокам памяти и вычитания имеется возможность сначала вьщелить, а затем и зарегистрировать избирательно только картину влияния воаауш ного потока, Для выделения данных изменения аэро динамических сил предварительно на стоян в зашшценном от воздушных потоков месте измеряют силы при подъеме и опускании токоприемника. Полученные таким образом данные статической характеристики заносят ручшмм набором в блок памяти с распределением по высотам, например переналадкой функционального преобразователя, В последующем данные о механическом состоянии и статическом нажатии данного экземпляра токоприемника, занесенные в блок памяти, считываются автоматически путем воздействия сигналов, подаваемых на управл5оощий вход в зависимости от высоты положения полоза, и передаюЕСя в качестве вычитаемого в блок 9. На второй вход в те же самые моменты noci-ynae соответствующий суммарный сигнал от силового измерителя 4. СледовательнОг после вычитания разница сигналов на выходе блска 9 пропорциональна лишь аэродинамической составляющей действующих сил, Известно, что величина аьродинамически сил изменяется не только от высоты, но и от скорости и направления движения подвижной едетлщы, т. е. от совпадешш в даш1ый момент направления движения и направлени ветра и от суммарного проявления их ско ростей. Влияние этих последних факторов извеегными станционарными устройствами выявлено быть не может. Своеобразие конструкции токоприемников, имеюЬшх в качестве привода подъема полоза пружины, и специфическке условия силовых измерений на подвижкьтх здиницах при наличии разнообразных и нерагуяярных динамических воацействий на исследуемый объект со стороны пути потребовали принятия конструктивных мер повышения точности замеров. Для STOI-U изменение Bcioij-гы подъема полоза токоприемника по желаемому закону выполняют специальным реверсивным механизмом типа электролебедки. Механизм подьема и измеритель удалены из зоны воаарйствия воэдушного потока для предотвращения его искажений и нарушения картины взаимодействия. В этом потоке оставлены лишь ролик и ги№ая тяга. Весь комплекс сил, действующих на полоз и раму токоприемника, с помощью тяги передается измерителю, на выходе которого вырабатывается соответствующий сигнал. Без механизма, плавно изменяющего высоту, принципиально невозможно получение точных значений сил и, как правило, нарушается непрерывность характеристики в рассматриваемых условиях. Ручное изменение высоты вызывает неизбежнъхе рывки и затратъг времени на последующее успокоение. Выполняя основное свое назначение повышение точности измерений, механизированный привод позволил получить дополнительные преимутдестйа, связанные с возможностью дистанционного управления подъемом токоприемника. Реальный токопоиемник. установлен в зоне высокого напряжения. Непосредственное управление их недопустимо по условиям техники безопасности. Ранее прибегали к моделированию условий эксплуатации, устанавливая испытуемый токоприемник на прицепной единице. Однако условия обтекания смоделиреваяъ достаточной точностью сложно, так как абочий токоприемник, как правило, установен в голове поезда и воздушный поток, ействующий на лобовую часть локомотива, е аналогичен периферийному воздушному отоку на прицепной единице, Возможность дистанционного управления озволила проводить испытания токопримников непосредство1шо в рабочей зоне с охранением радиальных условий эксплуаации, что обеспечило по гучение достоверых результато,
Принятые конструктивные решенвя раоширипв объем и сушествевно повысиЛК точность полученных данных, пригодных для дальнейшего разностороннего анализа.
Формула изобретения Регистратор аэродинамической характеристики токоприемника содержатвЕ свлс вой измеритель, реверсивный механизм, соединенный с немощью гибких тяг а роликов Q полозом токоприемника, ивкикатор отсч.ёта, отличающийся тем, что, с
целью повышения -точности измерения в условиях динамического вогдействия пути и воэдушного потока, устройство снабжено блоком памяти, блоком вычитания, датчиком высоты, который соединен по входу через систему гибких тяг с ПОЛОЗОМ токоприемника и соответственно со входами блока паж яти и индикатора отсчета, выход блока памяти соединен со входом блока вычитания, другой вход и выход которого связан соответственно с выходом силового измерителя н шиикатора отсчета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регистратор аэродинамической характеристики токоприемника | 1986 |
|
SU1411173A2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ САМОЛЕТА | 2015 |
|
RU2582492C1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОЕЗДА | 2003 |
|
RU2229987C1 |
| ВАГОН-ЛАБОРАТОРИЯ ИСПЫТАНИЙ КОНТАКТНОЙ СЕТИ | 2023 |
|
RU2806925C1 |
| ТОКОПРИЁМНИК ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2800163C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| Устройство для измерения статического момента двигателя постоянного тока | 1981 |
|
SU958990A1 |
| Метеорологическая система измерения пространственной структуры атмосферной турбулентности в неоднородном ландшафте | 2020 |
|
RU2738713C1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ВЫСОТЫ КОНТАКТНОГО ПРОВОДА | 2000 |
|
RU2180621C2 |
L
