действующим с установленными на пути его движения упорами.
На фиг. 1-5 схематично изображен предлагаемый дмаиииулятор IK доильныл ycTaiHOiBKavM с :различиыми ino конструкцрш .механизмаM4I поворота штанли; иа фиг. 6 и 7 показаны различиые по конструкции присооки, удерживающие доильные аппараты на штаиге; «а фиг. 8 да;на схема соедииеппя силовых цилиндров маипиулятора с магистральными трубопроводами вакуума « сжатого воздуха.
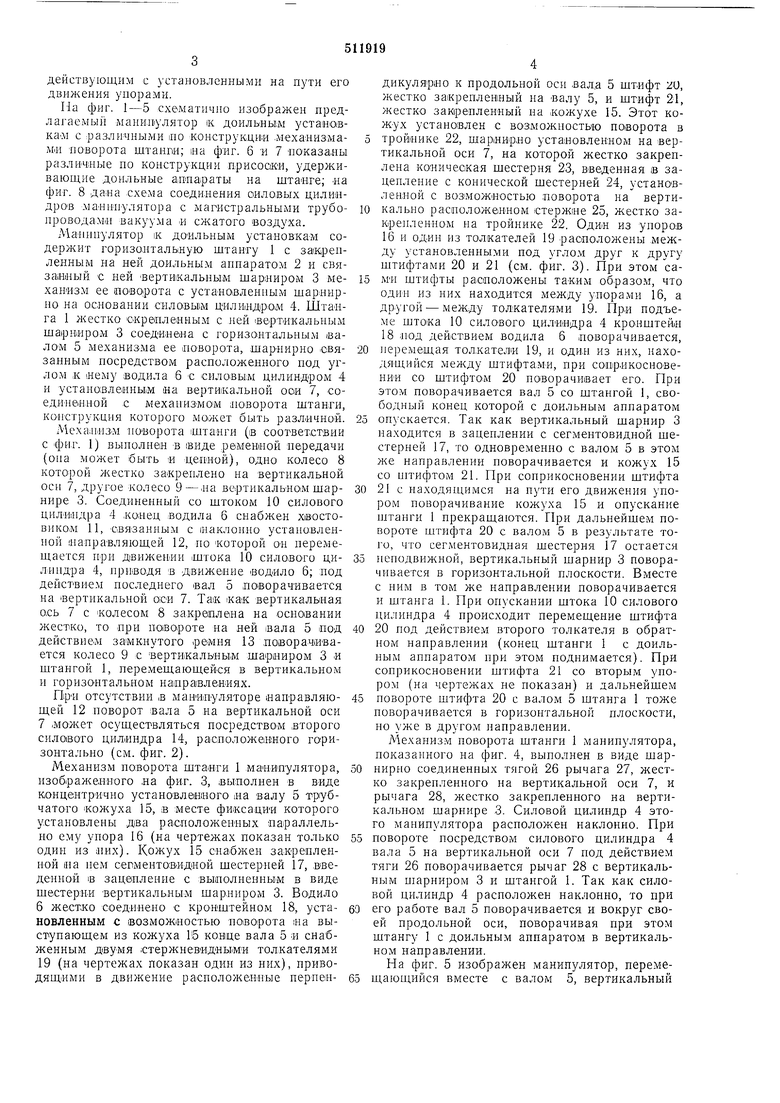
Мапппулятор IK доильпым установкам содержит горизонтальную штангу 1 с закрепленным па пей доильным аппаратом 2 и связанный с ней Вертикальным щарниром 3 механизм ее поворота с установленным шарнирпо на основании силовьим цилиндром 4. Штаига 1 жестко скрепленным с ней вертикальным maipHiHpoM 3 соединена с горизонтальным валоМ 5 механизма ее поворота, шарнирно связанным посредством расположенного под углом к нему водила 6 € силовым цилиндром 4 и установленным на вертикальной оои 7, соединбипой с мехапизМом поворота штанги, конструкция которого мо1жет быть разлпчной.
Меха;11изл1 поворота штанги (в соответствии с фиг. 1) выиолпен в виде ременной передачи (опа может быть я цепной), одно колесо 8 которой жестко за«реилено на вертикальиой оси 7, другое колесо 9 - на вертикальном шарпире 3. Соединенный со штоком 10 силового цилп;ндра 4 .конец водила 6 снабжен XIBOCTOвико.м 11, Связанным с наклонно установленной направляющей 12, по которой он перемещается При движеИИИ Штока 10 силового цилипдра 4, приводя :в движение водило 6; под действием последиего вал о поворачивается на вертикальной оси 7. Так как вертикальная ось 7 с колесом 8 закреплена на основании жестко, то при повороте на ней 1вала 5 под действием замкнутого ремня 13 .поворачивается колесо 9 с вертикальным шарниром 3 и щтангой 1, перемещающейся в вертикальном и горизонтальном направлениях.
При отсутствии (В манипуляторе направляющей 12 поворот вала 5 иа вертикальной оси 7 .может осуществляться посредствОМ второго силового цилиндра 14, раСположбнного горизоптальио (см. фиг. 2).
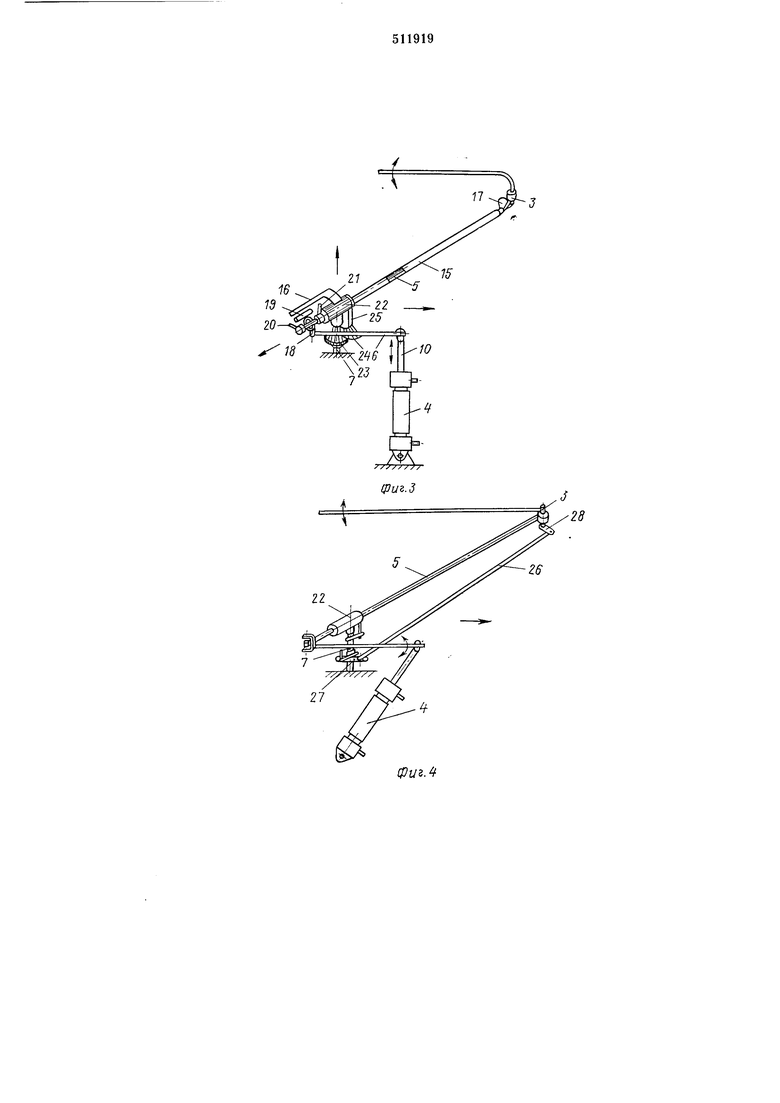
Механизм по.ворота щтанги 1 манипулятора, изображенного на фиг. 3, выполнен в внде концентрично устаиовленного на валу 5 трубчатого кожуха 15, в месте фиксации которого установлеиы два расиоложепных параллельно ему упора 16 (на чертежах показан только одии из них). Кожух 15 снабжен закренлениой нем сепментовндной шестерней 17, .введенной в зацепление с вьниолиепньш в виде щестерни вертикальным шар.ниром 3. Водило 6 жестко соединено с кронштейном 18, установленным с возможностью поворота на выступающем из кожуха 16 конце вала 5 п снабженным двумя стер ж невидными толкателями 19 (на чертежах показан один из них), приводяЩИми в движение расположенные перпепдикулярно к продольпой оси вал.а 5 щтифт М, жестко закреплепный на валу 5, и щтифт 21, жестко закрепленный на |Кожухе 15. Этот кожух установлен с возможностью поворота в тройнике 22, шарнирно установленном на вертикальной оси 7, на которой жестко закреплеиа коническая щестерия 23, введенная в зацепление с коиической щестерней 24, установленной с возможностью поворота иа вертикально расноло.жеННом стержне 25, жестко закреиленном на тройнике 22. Один из упоров 16 и один из толкателей 19 расположены между установленными под углом друг к другу щтифтами 20 и 21 (см. фиг. 3). При этом самн штифты расположены таким образом, что один из них находится между упорами 16, а другой - между толкателями 19. Прн подъеме штока 10 силового цилиндра 4 кронщтейн 18 аюд действием водила 6 поворачивается, переме.щая тол.кателн 19, и один из иих, находящийся между штифтами, при сопрнкосиовениИ со штифтом 20 П0ворачи1вает его. При этом поворачивается вал 5 со штангой 1, свободный конец которой с доильным аппаратом опускается. Так как вертикальный шарнир 3 находится в зацеплении с сегментовидной шестерней 17, то одновременно с валом 5 в этом же направлении поворачивается и кожух 15 со И1ТИФТОМ 21. При соирикосиовении штифта 21 с находящимся на пути его движения упором поворачивание кожуха 15 п опускание штанги 1 прекращаются. При дальнейщем повороте штифта 20 с валом 5 в результате того, что сегментовидпая шестерня 17 остается пеподвижиой, вертикальный шарнир 3 поворачивается в горизонтальной плоскости. Вместе с ним в том же направлении поворачивается и щтанга 1. При опускании штока 10 силового цилиндра 4 происходит перемещение штифта 20 под действием второго толкателя в обратном нанравлении (конец штанги 1 с доильным аппаратом при этом поднимается). При соприкосновении штифта 21 со вторым упором (на чертежах пе показан) п дальнейшем повороте штифта 20 с валом 5 штанга 1 тоже поворачивается в горизонтальной плоскости, по уже в другом направлении.
Механизм поворота штангп 1 манипулятора, показанного на фиг. 4, выполнен в виде щарнирпо соединенных тягой 26 рычага 27, жестко закрепленного на вертикальной оси 7, и рычага 28, жестко закрепленного на вертикальном шарнире 3. Силовой цилиндр 4 этого манипулятора расположеп наклонно. При повороте посредством силового цилиндра 4 вала 5 на вертикальной оси 7 под действием тяги 26 поворачивается рычаг 28 с вертикальным шарниром 3 и штангой 1. Так как силовой цилиндр 4 расположен наклонно, то при его работе вал 5 поворачивается и вокруг своей продольной оси, поворачивая при этом штангу 1 с доильным аппаратом в вертикальном направлении.
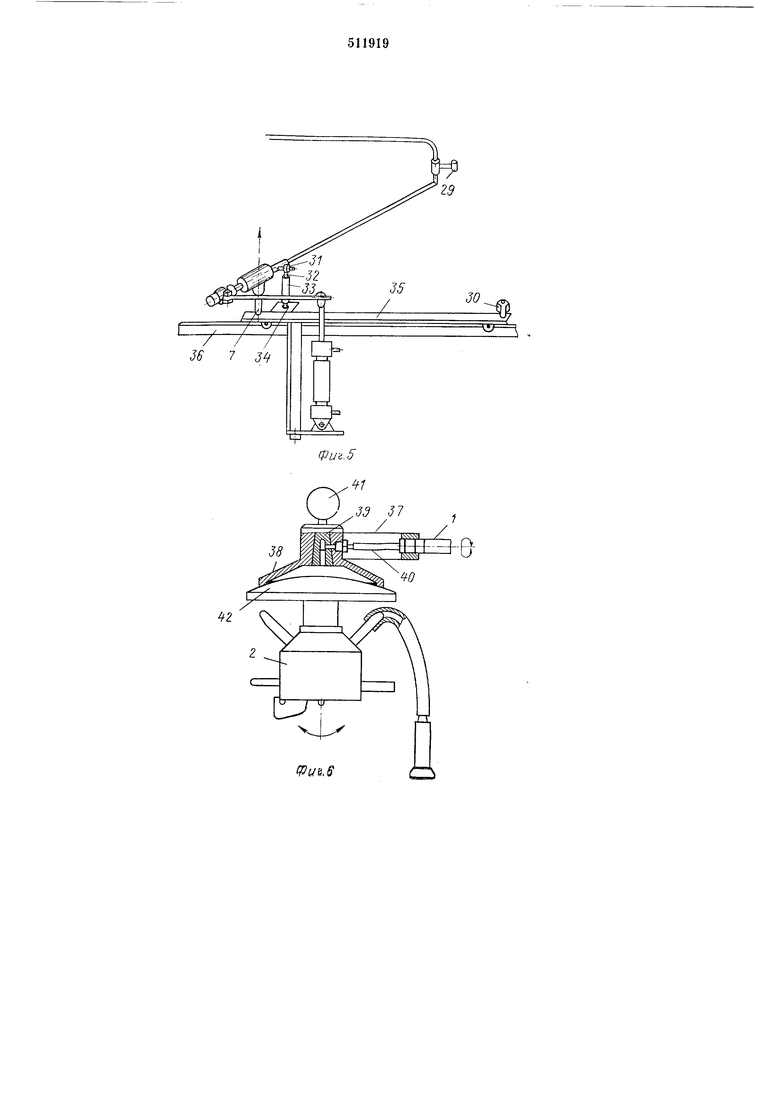
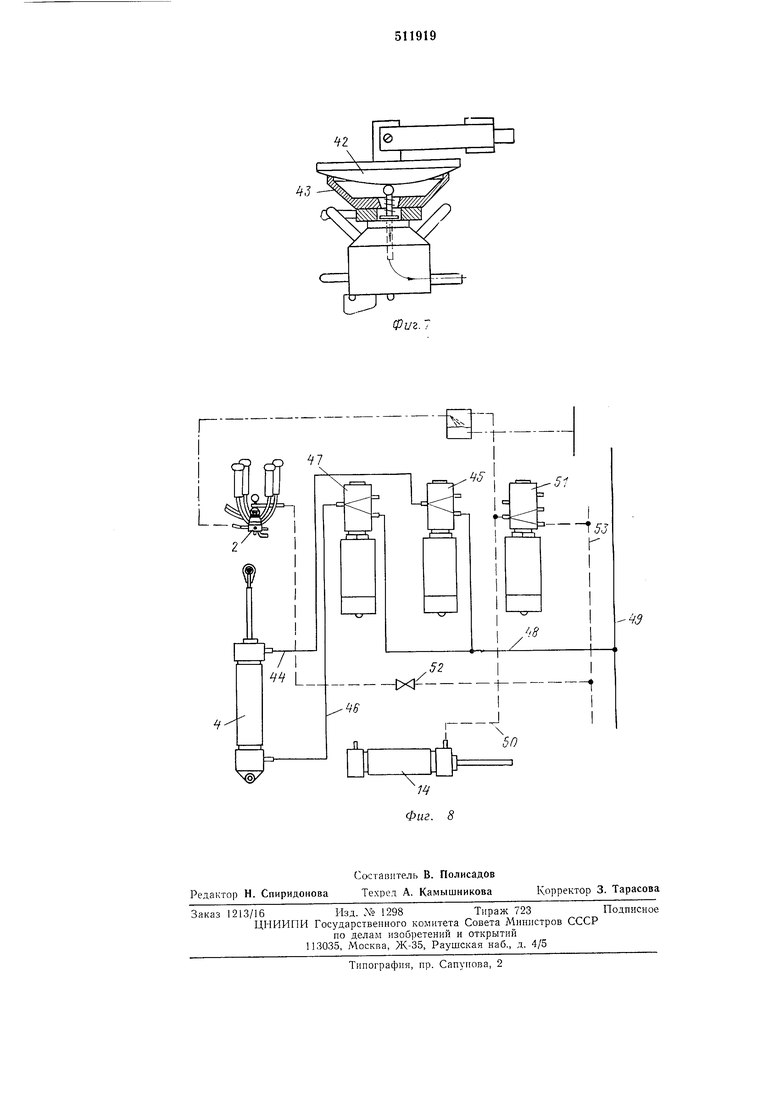
Па фиг. 5 изображен манипулятор, перемещающпйся вместе с валом 5, вертикальный шарнир 3 которого снабжен выступом 29, взаимодействующим с установленными на пути его движения упорами 30 (на чертежах показан только один из них). Вал 5 носредством шарнира 31 овяза1Н со стержнем 32, телескопичеоки соединенным со втулкой 33, снабженной шаровой онорой 34, шарнирно закрепленной на основании. При повороте вала 5 на .вертикальной оси 7 выступ 29 перемещается до находящегося на пути его движения упора 30. ПрИ дальнейшем перемещенни вала 5 в этом же направлении выступ 29 прижимается к упору 30, при этом вертикальный шарнир 3 вместе с жест1ко соединенной с ним штангой 1 поворачивается в горизонтальной плоскости. Направление поворота штанги 1 в горизонтальной плоскости зависит от нанравления поворота вала 5 на вертикальной оси 7. Поворот вала 5 (вокруг его продольной оси и перемещение вместе с ним штанги 1 в вертикальной плоскости осуществляются силовым цилиндром 4. При этом повороте вала 5 стержень 32 перемещается относительно втулки 33. Во время поворота вала 5 на вертикальной оси втулка 33 со стержнем 32 поворачивается на шаровой опоре 34. Манипулятор со всеми его элементами закреплен на подвижной платформе 35, установленной на направляющих 36. Поворот вала 5 на вертика.пъной оси у манипуляторов, изображенных на фиг. 3 и 5, так же и у манипулятора на фиг. 2, осуществляется посредством горизонтально расположенного силового цилиндра 14. На свободном конце щтанги 1 (фиг. 6) закреплена с возможностью поворота вокруг своей продольной оси трубка 37, на «онце которой жестко закреплена конусообразная присоска 38, онабженная пробковым краном 39, соединенным шлангом 40 с источником вакуума и управляемым рукояткой 41. Молокосборник доильного аппарата 2 снабжен щарнирно закрепленным на нем выпуклым диском 42, удерживаемым вместе с доильным аппаратом присоской 38, полость которой посредством крана 39 сообщается с источником вакуума. Присоска может быть выполнена в виде онабженнОЙ клапаном воронки 43, закрепленной на Молоко-сборнике доильного аппарата фиг. 7). В этом случае выпуклый диск 42 шарнирно крепится на штанге 1. Силовой цилиндр 4 соединен трубопроводом 44 с клапаном 45 и трубопроводом 46 - с клапаном 47. Клапаны 45 и 47 соединены трубопроводом 48 с магистральным трубопроводом 49 сжатого воздуха. Силовой цилиндр 14 вакуум-проводом 50 соединен с клапаном 51, который подключен к трубопроводу, идущему к молокосборяику доильного аппарата. Шланг 40 посредством трубопровода, снабженного краном 52, соединен с магистральным вакуумтрубопроводом 53, к которому подключен и клапан 51. Подвод доильного аппарата с надетыми на соскп .вымени доильными стаканами к вымени животного, различные иеремещеиия его в процессе доения и додаива}П5я н отвод от вымени ио окончании доения осуществляются включением в работу силовых цили1ндров 4 и 14. (Манипулятор может быть связан с системой программного управления.) Ф о р мула м 3 о б ) е т с н и я 1. Манипулятор .к доильным устааювкам, включающий горизонтальную щтангу с закрепленньш на ней доильным анпаратом и связанный с ней вертикальным шарниром механизм ее поворота с установленным шарнирно на основании спловьтм цилиндром, отличающийся тем, что, с целью повышения эффективности его работы, штанга жестко скрепленным с ней вертикальным mapiHupoM соединена с горизонтальным валом -механизма ее поворота, шарнирно связанным посредством расположенного под углом к нему водила с силовым цилиндром и уста1новленным на вертикальной оси, соединенной с механизмом новорота штанги, 2. Манипулятор по п. 0 т л и ч а ю и,1, и и с я тем, что механизм поворота штанги выполнен в виде ременной передачи, одно колесо которой жестко закрепле но на вертикальной оси вала, другое - на вертикальном шарнире, а соединенный с силовым цилиндром конец водила снабжен хвостовиком, установленным с возможностью перемещения по наклонно расположенной направляющей. 3.Манипулятор по п. 1, отличающийся тем, что механизм поворота штанги выполнен в виде концентрично установленного на валу поворотного трубчатого кожуха, в месте фиксации которого установлены расположен.ные параллельно ему упоры, и снабженного закрепленной на нем шестерней, введенной в зацепление с выполненным в виде шестерни вертикальным щарниром, а водило жестко соединено с кронштейном, установленным с возможностью поворота на выступающем из кожуха конце вала и снабженным стержневидными толкателями, приводящими в движение расположенные под прямым углом к продольной оси вала и взаимодействующие с упорами штифты, один из которых жестко закреплен на валу, а другой - иа кожухе. 4.Манипулятор по п. 1, отличающийся тем, что механизм поворота штанги выполнен в виде шарнирно соединенных тягой рычагов. один из которых жестко закреплен на вертикальной оси вала, а другой - на вертикальном шарнире. 5. Манипулятор по п. 1, отличающийся тем, что перемещающийся вместе с валом вертикальный щарнир снабл ен выступом, взаимодействующим с установленными на пути его движения упорами. Приоритет по пунктам: 12.06.69по пп. 1-3; 20.04.70по пп. 4, 5.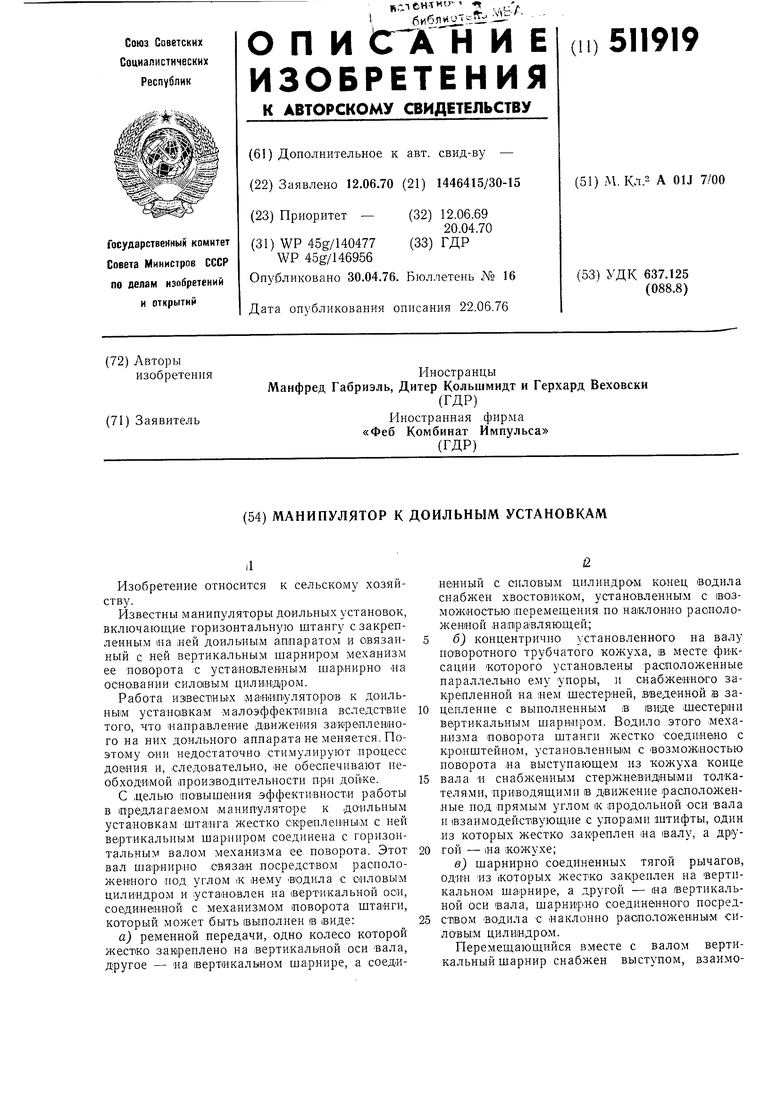
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для снятия доильных стаканов с сосков вымени и отвода доильного аппарата из-под коровы | 1978 |
|
SU701606A1 |
| Манипулятор доильной установки | 1988 |
|
SU1634193A1 |
| Устройство для преддоильной обработки вымени и доения животных | 1986 |
|
SU1349735A1 |
| Устройство для надевания доильных стаканов на соски вымени | 1984 |
|
SU1250224A2 |
| МОБИЛЬНЫЙ АВТОМАТ ДОЕНИЯ КОРОВ | 2000 |
|
RU2189737C2 |
| Манипулятор к доильным аппаратам | 1982 |
|
SU1113055A1 |
| ДОИЛЬНАЯ УСТАНОВКА С ВНУТРЕННИМ РОБОТИЗИРОВАННЫМ УСТРОЙСТВОМ | 2013 |
|
RU2578613C1 |
| Автоматический манипулятор для преддоильной санитарной обработки вымени коров | 1985 |
|
SU1377083A1 |
| Устройство для надевания доильных стаканов на соски вымени | 1984 |
|
SU1166750A1 |
| Манипулятор к доильным станкам | 1979 |
|
SU791347A1 |
Vuz.2
4
38
L
/e,
3d J7
. . . ,
Q
сгь
