Изобретение относится к области машиностроения.
Известно устройство для гибки змеевидных пружин из проволоки, содержаш,ее соосно установленные на станине два приводных вращающихся диска с шарнирно закрепленными на них рычагами, несущими гибочные ролики.
С целью расширения технологических возможностей в предлагаемом устройстве каждый диск снабжен клином, смонтированным в предусмотренном в диске пазу с возможностью регулировочного перемеш,ения в направлении, перпендикулярном к оси подачи проволоки, и взаимодействуюш,им скошенпой поверхностью с рычагами, при этом рычаги выполнены двуплечими.
Кроме того, привод враш,ения каждого диска выполпен в виде установленного сооспо с ним корпуса, песуш,его размеш,енную в нем коническую шестеренчатую передачу, связанную через промежуточную шестерню с установленной на смонтированном в станипе валу общей ведуш,ей шестерней, приводимой от двигателя, при этом один из корпусов жестко закреплеп на станине, а другой установлен с возможностью регулировочного поступательного перемеш,ения параллельно плоскости дисков.
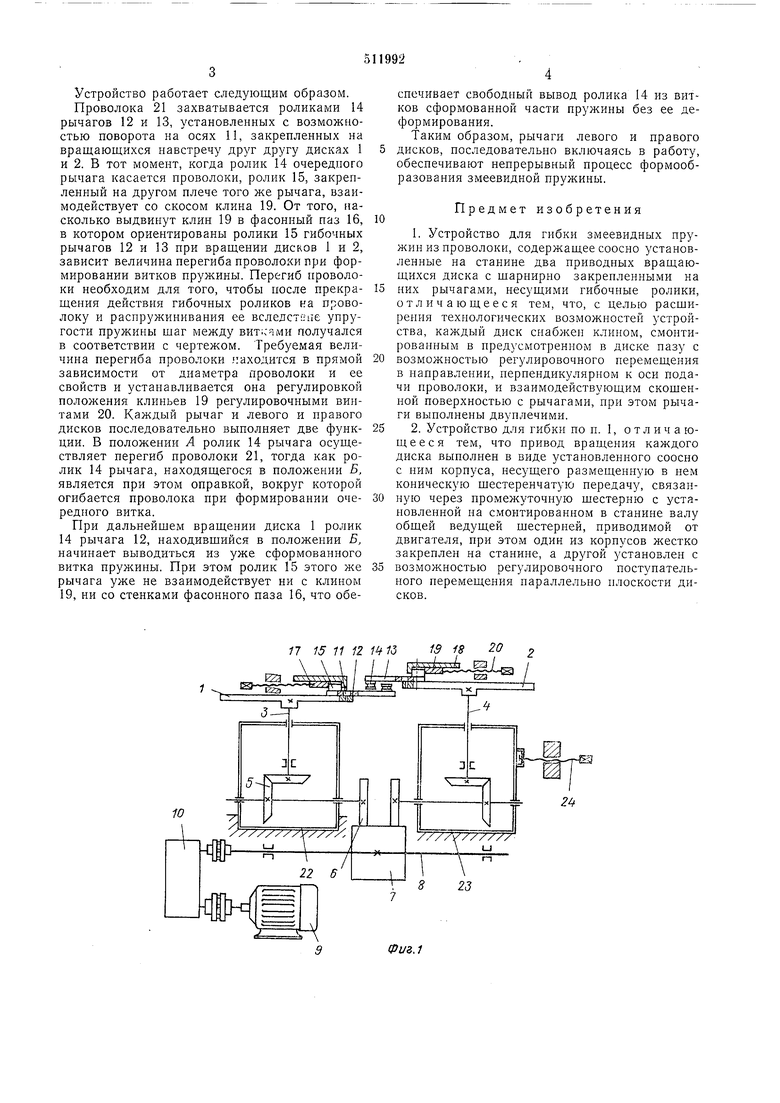
На фиг. 1 представлепа кинематическая
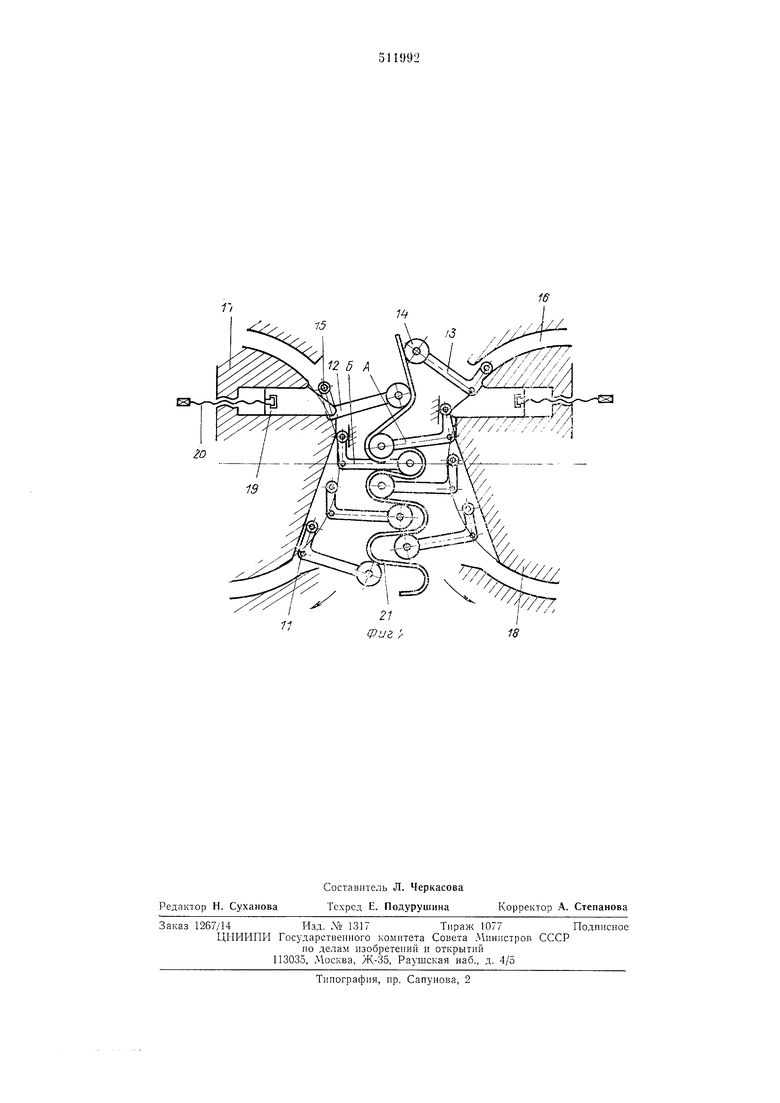
схема предлагаемого устройства; на фиг. 2 - механизм формообразования пружины.
Устройство состоит из двух приводных дисков 1 и 2, посаженных соответственно на валы 3 и 4, получающие встречное вращение через одинаковые конические передачи 5 и промежуточные шестерни 6 от общей ведущей шестерни 7, жестко закрепленной на валу 8. Последний получает вращение от электродвигателя 9 через редуктор 10.
На дисках 1 и 2 на осях 11 установлены с возможностью поворота двуплечие рычаги 12 и 13, снабженные гибочными роликами 14 и роликами 15, ориентированными в фасонных пазах 16 пеподвижных плит 17 и 18, установленных параллельно дискам 1 и 2. В местах, где рычаги 12 и 13 осуществляют гибку, в фасонные пазы 16 плит 17 и 18 выходят скосы клиньев 19, взаимодействующие с роликами 15 рычагов 12 и 13. Положение клиньев 19 определяется регулировочными винтами 20, которые и задают необходимый перегиб проволоке 21 при формировании витков пружины. Корпус 22 с прпводом левого диска закреплен на станине, а корпус 23 с приводом правого диска имеет возможность перемещаться при регулировках высоты витков пружины. Перемещение корпуса 23 осуществляется регулировочным винтом 24.
Устройство работает следующим образом.
Проволока 21 захватывается роликами 14 рычагов 12 и 13, установленных с возможностью поворота на осях 11, закрепленных на вращающихся навстречу друг другу дисках 1 и 2. В тот момент, когда ролик 14 очередного рычага касается проволоки, ролик 15, закрепленный на другом плече того же рычага, взаимодействует со скосом клина 19. От того, насколько выдвинут клин 19 в фасонный паз 16, в котором ориентированы ролики 15 гибочных рычагов 12 и 13 при вращении дисков 1 и 2, зависит величина перегиба проволоки при формировании витков пружины. Перегиб проволоки необходим для того, чтобы после прекращения действия гибочных роликов ка проволоку и распружинивания ее вследст-ае упругости пружины щаг между получался в соответствии с чертежом. Требуемая вели чина перегиба проволоки находится в прямой зависимости от диаметра проволоки и ее свойств и устанавливается она регулировкой положения клиньев 19 регулировочными винтами 20. Каждый рычаг и левого и правого дисков последовательно выполняет две функции. В положепии Л ролик 14 рычага осуществляет перегиб проволоки 21, тогда как ролик 14 рычага, находящегося в положении . является при этом оправкой, вокруг которой огибается проволока при формировании очередного витка.
При дальнейшем вращении диска 1 ролик 14 рычага 12, находившийся в положении Б, начинает выводиться из уже сформованного витка пружины. При этом ролик 15 этого же рычага уже не взаимодействует ни с клином 19, ни со стенками фасонного паза 16, что обеспечивает свободный вывод ролика 14 из витков сформованной части пружины без ее деформирования.
Таким образом, рычаги левого и правого дисков, последовательно включаясь в работу, обеспечивают непрерывный процесс формообразования змеевидной пружины.
Предмет изобретения
1.Устройство для гибки змеевидных пружин из проволоки, содержащее соосно установленные на станине два приводных вращающихся диска с шарпирно закренленными на них рычагами, несущими гибочные ролики, отличающееся тем, что, с целью расширения технологических возможностей устройства, каждый диск снабжен клином, смонтированным в нредусмотренном в диске пазу с возможностью регулировочного перемещения в направлении, перпендикулярном к оси подачи проволоки, и взаимодействующим скощенной поверхностью с рычагами, при этом рычаги выполнены двуплечими.
2.Устройство для гибки по п. 1, отличающееся тем, что привод вращения каждого диска выполнен в виде установленного соосно с ним корпуса, несущего размещенную в нем коническую шестеренчатую передачу, связанную через промежуточную шестерню с установленной на смонтированном в станине валу общей ведущей шестерней, приводимой от двигателя, при этом один из корпусов жестко закреплен на станине, а другой установлен с возможностью регулировочного поступательного перемещения параллельно плоскости дисков.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГИБКИ ЗИГЗАГООБРАЗНЫХ ИЗДЕЛИЙ ИЗ ЛЕНТЫ ИЛИ ПРОВОЛОЧНЫХ ЗАГОТОВОК | 2010 |
|
RU2425727C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРУЖИН С ДВУХСТОРОННЕЙ НАВИВКОЙ И ИЗГИБОМ В СРЕДНЕЙ ЧАСТИ | 2001 |
|
RU2197356C1 |
| Автоматическая линия изготовления спиралей | 1991 |
|
SU1821276A1 |
| Автомат для изготовления двухветвевых пружин | 1973 |
|
SU484036A1 |
| Автомат для изготовления из проволоки изделий различной конфигурации | 1972 |
|
SU478659A1 |
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
| Автомат для изготовления двух ветвевых пружин с отогнутыми концами | 1989 |
|
SU1657263A1 |
| В П Т Б | 1973 |
|
SU408691A1 |
| УНИВЕРСАЛЬНО-ГИБОЧНЫЙ АВТОМАТ | 1991 |
|
RU2030945C1 |
| Автомат для изготовления проволочных граблин | 1980 |
|
SU925493A1 |
S-11
18
