I
Изобретение относится к промьшшеиному транспорту, в частности к устройствам управления движением транспортных средств в процессе погрузки сыпучего материала, непрерывно подаваемого конвейером,например, в полувагоны магистрального железнодорожного транспорта, и может быть использовано на открытых разработках полезных ископаемых, на стационарных пунктах и при погрузке водного транспорта сыпучим материалом.
По основному авт. св. № 757446 известно устройство для автоматизированного управления тяговым агрегатом транспортного средства в процессе его загрузки сыпучим материалом, содержащее измеритель интенсивности потока материала загрузочного конвейера с преобразователем в частотно-модулированный сигнал и соединенный с его выходом блок задания линейной плотности материала, модуль потока и блок индикации текущих координат заданного
положения тягового агрегата, формирователь импульсов и импульсный генератор ввода начальных координат, один из выходов которого соединен с основньм входом модели потока текущих координат заданного положения тягового агрегата, сдвиговый вход которой сое-, динен с выходом формирователя импульсов, а выход - с блоком индика1Ц1и текущих координат заданного положения
10 тягового агрегата, причем входы формирователя импульсов соединены с выходами импульсного генератора ввода начальных координат и блока задания .линейной плотности материала. Модель
IS потока текущих координат заданного положения тягового агрегата выполнена в виде регистра сдвига, а блок за-- Дания линейной плотности материала содержит делитель частоты и коммута20тор, подключенный к управляющему входу делителя частоты fl.
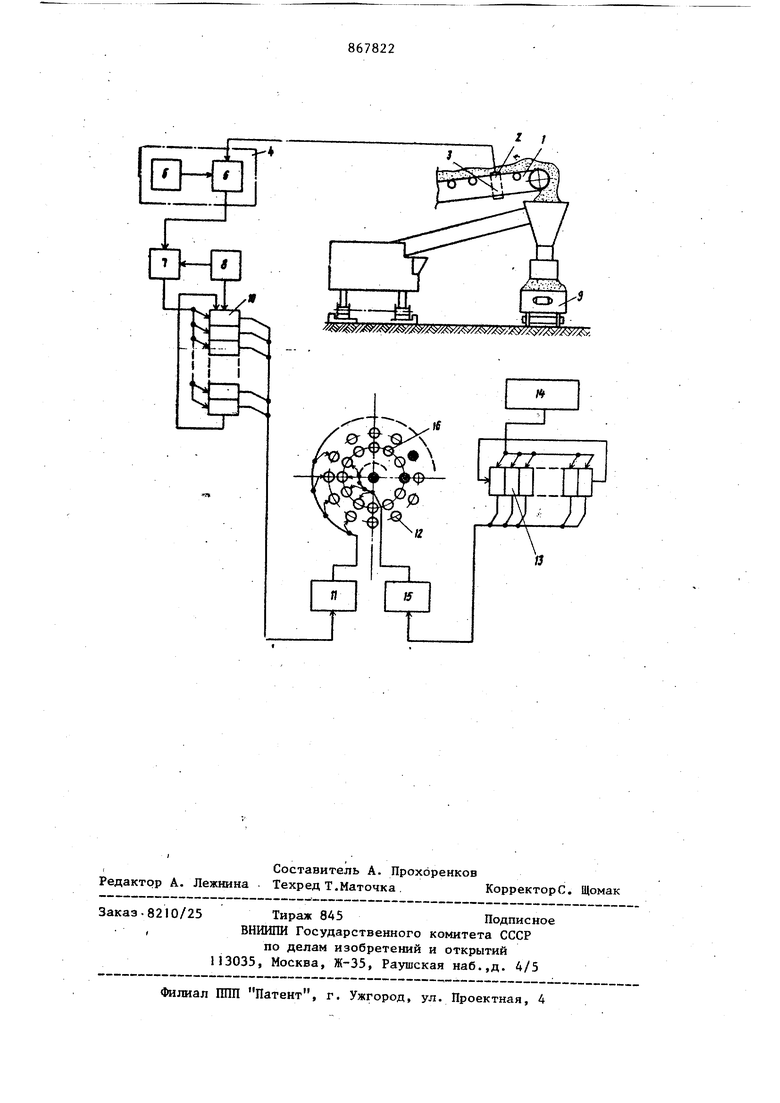
Недостатком этого устройства является низкая эффективность загрузки транспортного средства вследствие субьективной ошибки, возникающей при сравнении заданных координат положения тягового агрегата с фактическим в различных масштабах. Цель изобретения - повышение эффективности загрузки. Указанная цель достигается тем, что блок индикации текупщх координат заданного положения тягового агрегата вьшолнен на источниках света, расположенных на табло последовательно между собой, а устройство снабжено соединенмьо и последовательно блоком вычисления фактической скорости тягового агрегата, моделью и блоком индика1щи координат фактического положения тягового агрегата, выполненным на источниках света-, расположенных на табло последовательно собой, а каждый из них - на одной линии визирования с соответстByioQUiMH источниками света блока индикации текущ1Х координат заданного положения тягового агрегата. Модель фактического положения тягового агрегата может быть выполнена в виде циклического регистра сдвига, выходы ячеек которого подключены к источникам света блока индикации коор динат фактического положения тягового arperaS-a. Кроме того, регистр сдвига модели потока текущих координат заданного положения тягового агрегата может бы выполнен циклическим. На чертеже представлена функциональная схема устройства. На загрузочном конвейере I установлен частотный измеритель 2 интен сивности потока материала, который состоит из первичных прео бразователей - измерителя погонной нагрузки, датчика скорости движения конвейерной ленты и датчика угла наклона кон вейера 1 и вторичного прибора - преобразователя 3 в частотно-модуга1рова ный сигнал. Выход измерителя 2 интен сивности потока материала подключен ко входу блока 4 задания линейной плотности материала, содержащего управляеный коммутатор 5. и делитель 6 частоты, выход которого соединен с одним из входов формирователя 7 импульсов . Д1)угой вход формирователя 7 импульсов подключен к одному из выходов импульсного генератора 8, другой выход которого соединен со входс модели потока текущих координат заданного положения тягового агрегата 9, выполненной в виде циклического регистра 10 сдвига. Сдвиговый вход регистра 10 сдвига подключен к выходу формирователя 7 импульсов. Выходы ячеек регистра 10 сдвига соединены через коммутатор 11 со входом блока индикации текущих координат заданного положения тягового агрегата 9, выполненного в виде источников 12 света, расположенных на табло последовательно, например, по окружности. Модель фактического положения тягового агрегата 9 выполнена в виде циклического регистра 13 сдвига, сдвиговый вход которого подключен к выходу блока 14 вычисления фактической скорости тягового агрегата 9. Выходы ячеек регистра 13 сдвига соединены через коммутатор I5 со входом блока индикации координат фактического положения тягового агрегата 9, выполненного в виде источников 16 света, расположенных на табло последовательно, например, по окружности, концентричной с первой. Источники 12 и 16 света, отражающие равнозначную информацию о заданном и фактическом положении тягового агрегата 9, расположены на одних радиусах. Устройство работает следующим образом . При движении потока материала по конвейеру I и далее через разгрузочный бункер в зону погрузки измеритель 2 интенсивности потока материала вырабатывает модулированный импульсный сигнал, пропорциональный интенсивности потока. Указанный сигнал поступает в блок 4 задания линейной плотности материала, где коммутатор 5, с помощью которого задается линейная плотность материала, подлежащего размещению в транспортных средствах, управляет делителем 6 частоты. В результате деления значения ннтенсивности на значение линейной плотности материала, подлежащего размещению в транспортных средствах, появляется сигнал, соответствующий заданной скорости движения тягового агрегата 9. Этот сигнал поступает в формирователь 7 импульсов. Предвари-, тельно введенная с помощью импульсного генератора 8 информация в одну из ячеек регистра 10 сдвига смещается на один шаг по мере поступления на соединенные параллельно сдвиговые входы ячеек каждого следующего импульса, поступающего с выхода формирователя 7 импульсов. При этом текущее положение информации в регистре 10 сдвига соответствует в установленном масштабе текущему. значению интегрального количества(по массе) материала, поданного для погрузки, т.е. моделируется заданное текущее положение транспортного срёд ства, соответствующее интегральному количеству материала, поданного для погрузки. Состояние ячеек регистра 1 сдвига, т.е. текущее значение координат заданного положения тягового агрегата 9, отображается соответствующими источниками 12 света. Одновременно с зтим сигнал, который , формируется на выходе блока 14 вычисления фактической скорости тягового агрегата 9, управляет реверсивным сдвигом информагши в регистре 13 сдвига, состояние ячеек которого ото бражается соответствующими иточниками ) 6 света блока индикации координа фактического положения тягового агре гата 9. При совпадении фактического положения тягового агрегата 9 и заданног включенные соответствующие источники 1.2 и 16 света находятся на одном радиусе концентрических окружностей. В противном случае необходимо изменить положение тягового агрегата 9 таким образом, чтобы включенные исг точники 12 и 16 света, индицируювще заданное и фактическое положения, ок зались на одном радиусе концентричес ких окружностей. Для прогнозирования туации в зо не загрузки служит информа1дая о скорости изменения координат заданного . и фактического пoлoжeниJi тягового агрегата. Эти величины представляются в форме угловых скоростей вр ащательного движеш1я соответствующих светящихся злемеитов на концентрических окружностях, в центре которых установлен постоянно светяишйся источник света.. Вьшолнение моделей потока текуа(их координат заданного и фактического положений тягового агрегата дает возможность использовать многообходн 26 метод дистанционной передачи информации и получать наглядную информацию для оперативного и точного управ-. ления тяговым агрегатом D течение всего процесса загрузки, что позв9ляет повысить эффективность загрузки транспортного средства и равномерно разместить в нем груз. Формула изобретения 1. Устройство для автоматизированного управления тяговым агрегатом . транспортного средства в процессе его загрузки сыпучим материалом по авт. св. № 757446, отличающееся тем, что, с целью повышения эффектив-. ности загрузки, блок индикации текув х координат заданного пЪложения тягового агрегата выполнен на источниках света, расположенных на табло последовательно меядау собой, а устройство снабжено соединенными последовательно блоком вычисления фактической скорости тягового агрегата, моделью и блоком индикации координат фактического положения тягового агрегата, выполиенньм на источниках.света , расположенных на табло последовательно между собой, а каждый из них - на одной линии визирования с соответствующими источниками света блока индикации текущих координат заданного положения тягового агрегата. 2.Устройство по п. I, о т л и- чающееся тем, что модель фактического положения тягового агрегата выполнена в виде циклического регистра сдвига, выходы ячеек которого подк вочены к источникам света блока индиках н координат фактического положе Ю1Я тягового агрегата. 3.Устройство по пп. 1 и 2, о т пн чающееся тем что регистр сдвига модели потока текущих кооринат .заданного положения тягового грегата выполнен Щ1клическим. Источники информации, ринятые во внимание при экспертизе 1. Авторское свидетельство СССР 757446, кл. В 65 G 67/22, 1977.
I 1
5 W W iS;3 « %ww 5 x
Ж- Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погрузки сыпучего материала в состав железнодорожных полувагонов | 1980 |
|
SU943158A1 |
| Устройство для погрузки сыпучих материалов в железнодорожные транспортные средства | 1978 |
|
SU768735A1 |
| Устройство для управления загрузкой сыпучих материалов в железнодорожные полувагоны | 1978 |
|
SU906873A1 |
| Устройство для погрузки сыпучего материала в железнодорожные вагоны | 1976 |
|
SU659489A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1987 |
|
SU1422017A1 |
| Устройство для дифференцированного учета материала, перемещаемого конвейерной линией | 1981 |
|
SU972536A2 |
| Устройство для управления погрузкой сыпучих материалов из бункеров в движущийся состав | 1977 |
|
SU691371A1 |
| Устройство для сопряжения электронно-вычислительной машины с табло индикации | 1984 |
|
SU1211739A1 |
| Устройство для настройки валков сортопрокатной клети | 1986 |
|
SU1331599A1 |
| Устройство для дифференцированного учета материала, перемещаемого конвейером | 1977 |
|
SU748469A1 |