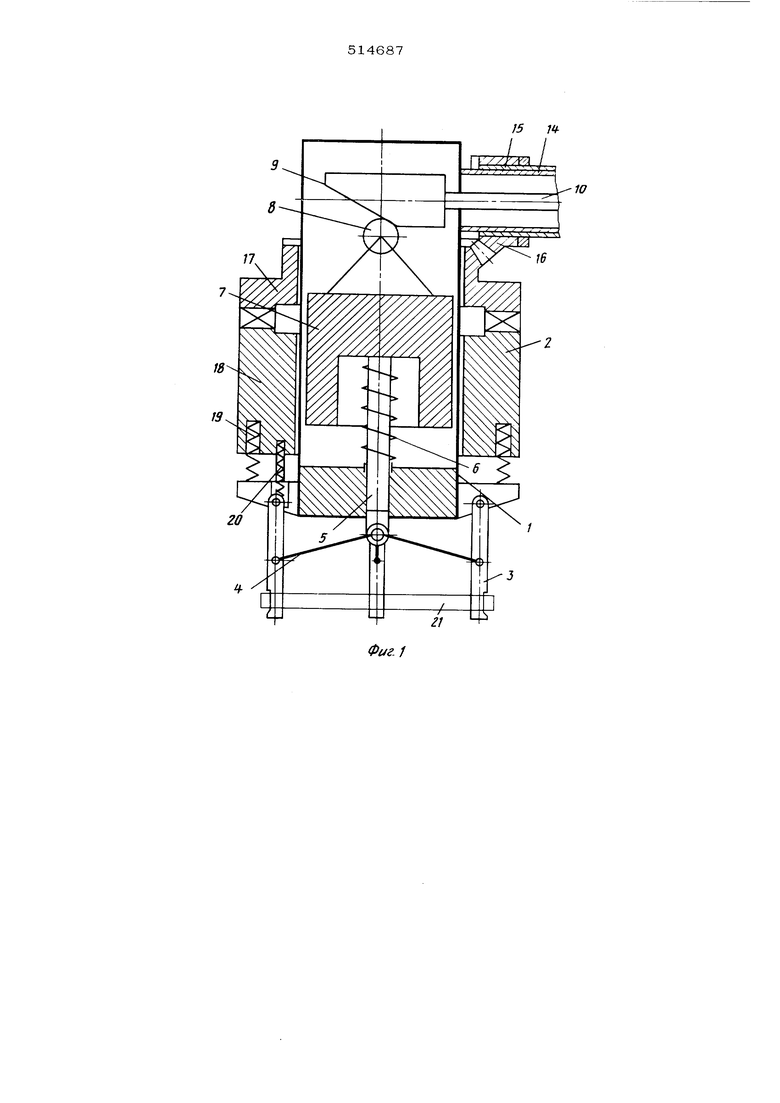
Изобретение относится к манипуляторостроению, в частности к исполнительному ор гану манипулятора для захвата изделий типа алитированных вставок под компрессионные кольца поршней из рабочей зоны и укладки их в кокиль. Известны исполнительные органы манипуляторов, содержащие корпус, захват и шар нир поворота захвата с приводом. Однако такой манипулятор не обеспечива ет высокого качества укладки алитированных вставок под компрессионные кольца в кокиль, потому что вставку, изготовленную из износостойкого материала, для лучшего сцепления с основным сплавом отливки порш ня предварительно погружают в ванну с алю миниевым расплавом и при ее извлечении из расплава образуются потеки, которые, кристаллизуясь на воздухе, увеличивают и искажают диаметр вставки. Цель изобретения - повысить качество изготавливаемых алитированньк вставок под компрессионные кольца. Это достигается тем, что исполнительный орган снабжен ударно-импульсным механизмом, смонтированным на корпусе и кинематическн связанным с приводом поворота захвата. Ударноимпульсный механизм выполнен в двух храповьк полумуфт, одна из которых установлена подвижно и кинематически связана с губками захвата. На фиг, 1 изображе - описываемый исполнительный орган манипулятора, общий ви/: на фиг, 2 - схема манипулятора с предлагаемым исполнительным органом. Исполнительный орган манипулятора с одержкт корпус 1 с установленным на нем ударно-импульсным механизмом 2, захват с губками 3, шарнирно связан1{ыми с рычагами 4, закрепленными на нижнем конце штока 5, снабженногс возвратной пружиной 6 и установленной на верхнем конце штока направляющей 7 с роликом S, взаимодействующим со скосом 9 скалки 10, подвижной От привода 11 захвата (фиг, 2). Шарнир поворота захвата в вертикальной плоскости соединен с приводом 12 через кривошип 13 и вал 14, закрепленньй на корпусе 1 и расположенный внутри руки 15с жестко закрепленной на ней шестерней 16, Удар3
но-иктульсньш механизм 2 имеет колесо попумуфты 17, храпэвую оолумуфту 18 с пружинами 19 и фиксатор 20, действующий через губки 3 на эбрабатываемое кольцо 21 а также привод 22 разворота руки 15,
При включении привода 11 скалка 10 через систему рычагов перемещается в крайнее левое гюлохсение и своим скосом 9 действует через ролик 8 и направляющую 7 на шток 5, перемещая его вниз. При этом пружииа 6 сжимается, а шарнирно закрепленны на конце штоко 5 рычаги 4 действуют на губки 3 захвата, разводя их в стороны, и фиксируют обрабатываемое кольцо 21 по внутреннему диаметру в трех (по числу губок). После этого включается привод 12 поворота захвата в вертикальной плоскости, который своим штоком воздействует на кривоииш 13, передающий вращение на 90 валу 14, и поворачивает корпус 1, При повороте корпуса 1 колесо полумуфты 17, обкатьтаясь по шестерне 16, жестко закрепленной на руке 15, поворачивается отнссителььо храповой полумуфты 18. При этом происходит прошелкивание зубьев храповой полумуфты, создающее ударно-импульсную погрузку, чем достигается постоянное встряхивание закрепленного в губках 3 обраб 1ть(ваемого кольпа 21.
Полу муфта 18,, взаимодействуя с колесом полумуфты 17, движется только воз- вг атно-иоступательно, преодолевая усилие пружин 19. Полумуфта 18 от вращения удерживается фиксатором 20, который в данный NJOMOHT находится в запертом положении. Как только захват манипулятора примет вертикальное (рабочее) положение, включается привод 22 разворота руки манипулятора и губки устанавливаются в заданную позицию (над кокилем), затем включается привод 23 вертикального перемещения манипулятора и
4
кольцо 21 опускается (в кокиль). Последующим включением привода 11 скалка О перемещается в крайнее правое положение, цри этом ее скос 9 сходит с ролржа 8, освобождая пружину 6, которая сеоим усилием поджимает щток 5 в крайнее верхнее положение и через рычаги 4 сводит губки 3, освобождая кольцо 21. После этого привод вертикального перемещения переключается и захват возвращается в исходное положение (к ванне). При этом фиксатор 2О выходит из зацепления, колесо полумуфты 17 и храповая полумуфта 18 запираются обратной стороной зубьев и работают как одно целое, совери ая обкатывание вокруг щестерни 16,
Как только захват манипулятора займет горизонтальное положение и рука 15 развернется в исходную позицию, привод 12 поворота захвата и привод 22 разворота рукк 15 отключаются и цикл работы манипулятора повторяется.
Формула изобретения
1,Исполнительный орган ктанипугштора содержащий корпус, захват и щарнир поворота захвата с приводом, отличающийся тем, что, с целью повышения качества изготавливаемых изделий, в частности алитированных вставок под компрессионные кольца, он снабжен ударно-импульным механизмом, смонтированным на корпусе и кинематически связанным о приводом поворота захвата,
2.Исполнительный орган по п. 1, отличающийся тем, что ударно-импульсный механизм выполнен в виде двух храповых полумуфт, одна из которых установлена подвижно и кинематически связана с губками захвата.
/5 14;
22
/
Ш
h


| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для изготовления отливок армированных алитированными вставками | 1976 |
|
SU655472A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Механическая рука для транспортирования банок щелочных аккумуляторов | 1977 |
|
SU683898A1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| Роторная линия для центробежного литья гильз | 1981 |
|
SU1012500A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Манипулятор | 1986 |
|
SU1371851A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |

I
О,
Г
Фие.2
