1
Изобретение относится к области машиностроения, а именно к манипуляторам для транспортировки штучных грузов.
Известна механическая рука с захватом, предназначенным для транспортирования штучных грузов, в которой содержатся захватные рычаги с приводом и губки из эластичного материала, наружная поверхность которых выполнена в виде протектора 1. Недостатком известной механической руки является низкая надежность при транспортировании бапок нлелочных аккумуляторов за контактные шпильки.
Наиболее близким решением из известных является механическая рука, содержащая захват с приводными губками и механизмы опускания-подъема и поворота захвата 2.
К недостаткам этой механической руки относятся низкая надежность захвата и транспортирование банок щелочных аккумуляторов за контактные шпильки, требующих обеспечения строго заданного фиксированного положения.
Целью настоящего изобретения является повыщение надежности.
Указанная цель достигается тем, что каждая губка снабжена вкладын ем, вы.полнеппым из электроизоляционного материала и спрофилированным по резьбе шпильки, а между этими вкладышами установлен конический стержень.
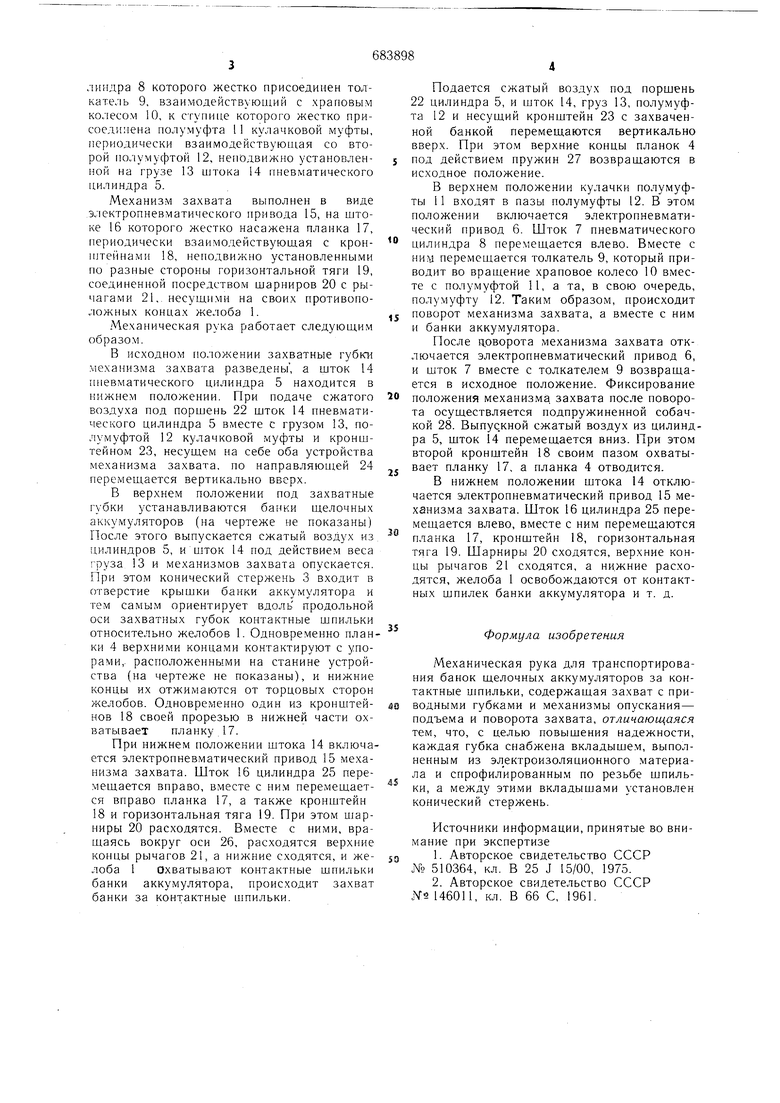
На фиг. 1 изображен общий вид ме.ханической руки; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 1.
Механическая рука для захвата и транспортирования банок щелочных аккумуляторов за контактные шпильки включает механизмы подъема, поворота и захвата. Механизм захвата снабжен приводными губками, выполненными в виде желобов 1, футерованных электроизоляционным MaTepnavioM 2 и профилированных по резьбе контактных щпилек, а между желобами установлен конический стержень 3, С торцовых сторон желобов 1 шарнирно установлены подпружиненные планки 4,
Механизм подъема выполнен в виде пневматического цилиндра 5. Л еханизм поворота выполнен в виде электропневматического привода 6, к штоку 7 пнев 1атического цилиндра 8 которого жестко присоединен толкатель 9, взаимодействующий с храповым ко.лесом 10, к ступице которого жестко присоединена полумуфта 1 кулачковой муфты, периодически взаимодействующая со второй полумуфтой 12, неподвижно установленной на грузе 13 штока 14 пневматического цилиндра 5.
Механизм захвата выполнен в виде электропневматического привода 15, на штоке 16 которого жестко насажена планка 17, периодически взаимодействующая с кронп тейнами 18, неподвижно установленными по разные стороны горизонтальной тяги 19, соединенной посредством щарниров 20 с рычагами 21,. несущими на своих противоположных концах желоба 1.
Механическая рука работает следующим образом.
В исходном но.ложении захватные губки механизма захвата разведены , а щток 14 пневматического цилиндра 5 находится в нижнем ноложении. При подаче сжатого воздуха под порщень 22 щток 14 пневматического цилиндра 5 вместе с грузом 13, полумуфтой 12 кулачковой муфты и кронщтейном 23, несущем на себе оба устройства механизма захвата, по направляющей 24 перемещается вертикально вверх.
В верхнем положении под захватные губки устанавливаются банки щелочных аккумуляторов (на чертеже не показаны) После этого выпускается сжатый воздух из цилиндров 5, и щток 14 под действие.м веса груза 13 и механизмов захвата опускается. При этом конический стержень 3 входит в отверстие крышки банки аккумулятора и тем самым ориентирует вдоль продольной оси захватных губок контактные щпильки относительно желобов 1. Одновременно планки 4 верхними концами контактируют с упорами,- расположенными на станине устройства (на чертеже не показаны), и нижние концы их отжимаются от торцовых сторон желобов. Одновременно один из кронштейнов 18 своей прорезью в нижней части охватывает планку 17.
При нижнем положении щтока 14 включается электропневматический привод 15 механизма захвата. Шток 16 цилиндра 25 перемещается вправо, вместе с ним перемещается вправо планка 17, а также кронштейн 18 и горизонтальная тяга 19. При этом шарниры 20 расходятся. Вместе с ними, вращаясь вокруг оси 26, расходятся верхние концы рычагов 21, а нижние сходятся, и желоба 1 Охватывают контактные шпильки банки аккумулятора, происходит захват банки за контактные шпильки.
Подается сжатый воздух под порщень 22 цилиндра 5, и щток 14, груз 13, полумуфта 12 и несущий кронштейн 23 с захваченной банкой перемещаются вертикально вверх. При этом верхние концы планок 4
под действием пружин 27 возвращаются в исходное положение.
В верхнем положении кулачки полумуфты 11 входят в пазы полумуфты 12. В этом положении включается электропневматический привод 6. Шток 7 пневматического
цилиндра 8 перемещается влево. Вместе с ним перемещается толкатель 9, который приводит во вращение храповое колесо 10 вместе с полумуфтой 11, а та, в свою очередь, полумуфту 12. Таким образом, происходит
5 поворот механизма захвата, а вместе с ним и банки аккумулятора.
После поворота механизма захвата отключается электропневматический привод 6, и щток 7 вместе с толкателем 9 возвращается в исходное положение. Фиксирование
о положения механизма, захвата после поворота осуществляется подпружиненной собачкой 28. Выпус.кной сжатый воздух из цилиндра 5, шток 14 перемещается вниз. При этом второй кронщтейн 18 своим пазом охватыJ вает планку 17, а планка 4 отводится.
В нижнем положении щтока 14 отключается электропневматический привод 15 механизма захвата. Шток 16 цилиндра 25 перемещается влево, вместе с ним перемещаются планка 17, кронштейн 18, горизонтальная тяга 19. Шарниры 20 сходятся, верхние концы рычагов 21 сходятся, а нижние расходятся, желоба 1 освобождаются от контактных щпилек банки аккумулятора и т. д.
Формула изобретения
Механическая рука для транспортирования банок щелочных аккумуляторов за контактные шпильки, содержащая захват с приводными губками и механизмы опускания - подъема и поворота захвата, отличающаяся тем, что, с целью повышения надежности, каждая губка снабжена вкладыщем, выполненным из эл ектроизоляционного материала и спрофилированным по резьбе щпильки, а между этими вкладыщами установлен конический стержень.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
№ 510364, кл. В 25 J 15/00, 1975.
2. Авторское свидетельство СССР N4 146011, кл. В 66 С, 1961.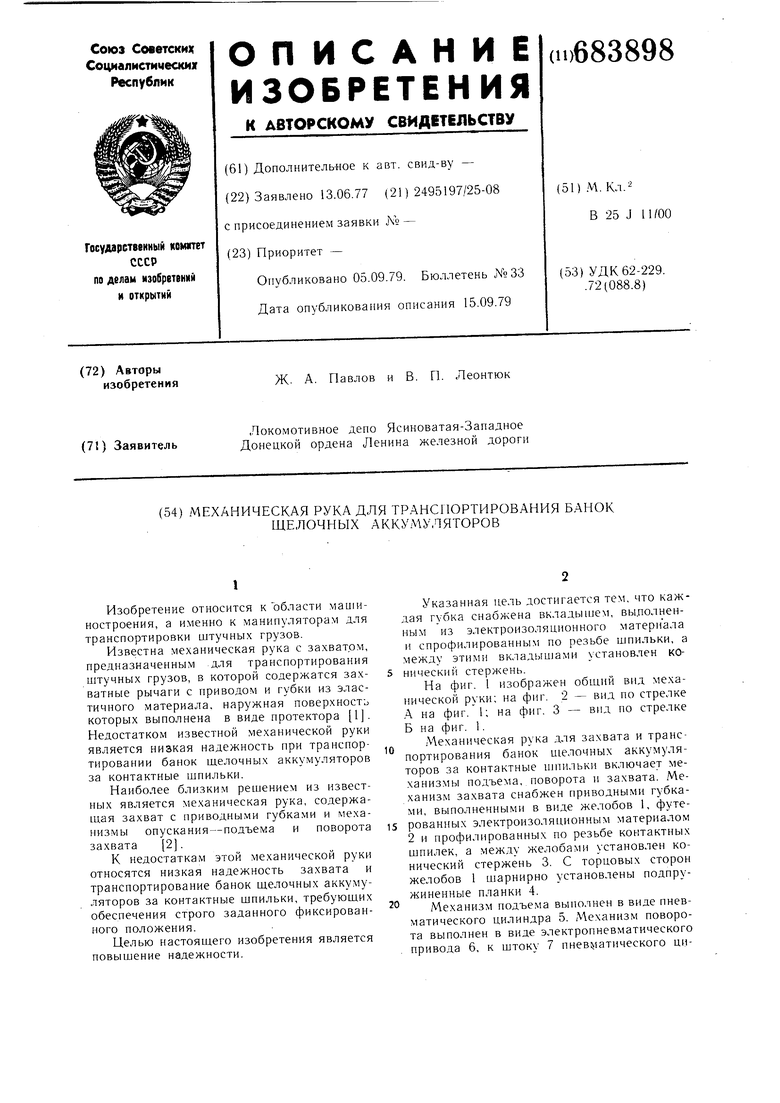

15 2S/7 i6
