(54) ПРОМЫШЛЕННЫЙ РОБОТ
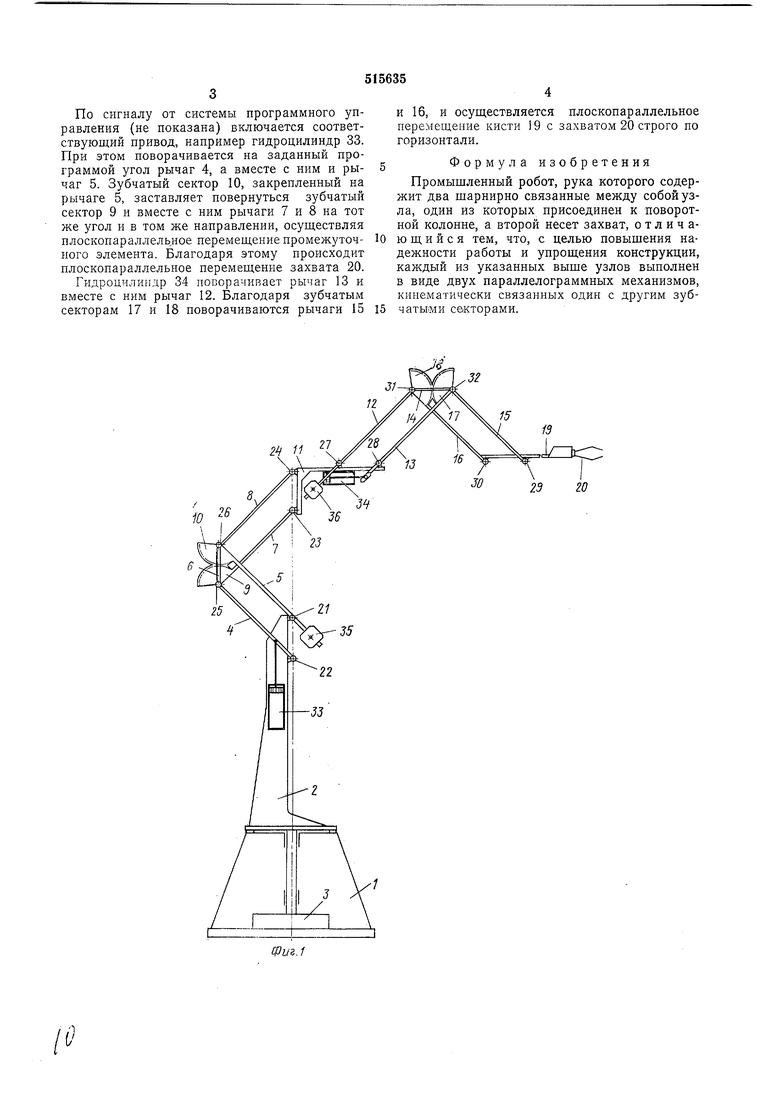
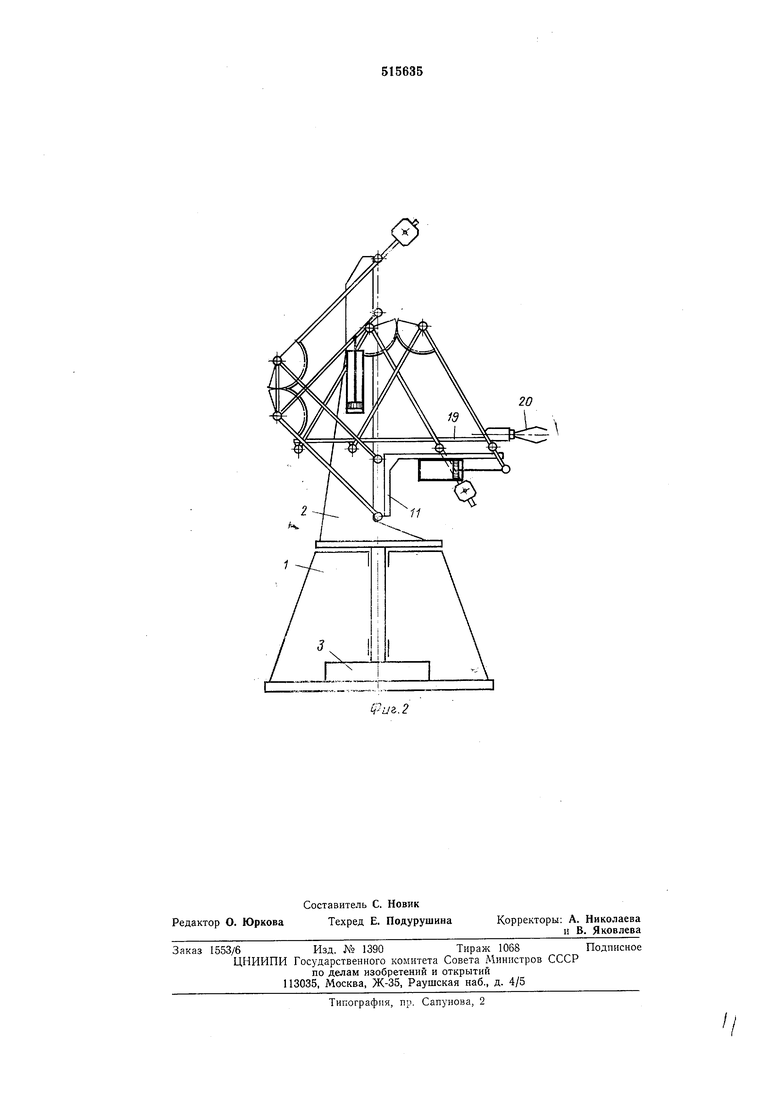
По сигналу от системы программного управления (не показана) включается соответствующий привод, например гидроцилиндр 33. При этом поворачивается на заданный программой угол рычаг 4, а вместе с ним и рычаг 5. Зубчатый сектор 10, закрепленный на рычаге 5, заставляет повернуться зубчатый сектор 9 и вместе с ним рычаги 7 и 8 на тот же угол и в том же направлении, осуществляя плоскопараллельное перемещение промежуточного элемента. Благодаря этому происходит плоскопараллельное перемещение захвата 20.
Гидроцилиидр 34 поворачивает рычаг 13 и вместе с ним рычаг 12. Благодаря зубчатым секторам 17 и 18 поворачиваются рычаги 15
и 16, и осуществляется плоскопараллельное перемещение кисти 19 с захватом 20 строго по горизонтали.
Формула изобретения
Промышленный робот, рука которого содержит два щарнирно связанные между собой узла, один из которых присоединен к поворотной колонне, а второй несет захват, отличающийся тем, что, с целью повышения надежности работы и упрощения конструкции, каждый из указанных выще узлов выполнен в виде двух параллелограммных механизмов, кинематически связанных один с другим зубчатыми секторами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОТСЧЕТА ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU358103A1 |
| Устройство для захвата и передачи кольцеобразных заготовок на сборочный барабан | 1980 |
|
SU841203A1 |
| Машина для гибки трубных панелей | 1979 |
|
SU835563A1 |
| Машина для вязания сетей | 1934 |
|
SU44299A1 |
| Устройство для изготовления рулонных пружин | 1976 |
|
SU654329A1 |
| Устройство для заневоливания пружин | 1979 |
|
SU1015147A1 |
| АВТОМАТ ДЛЯ МОНТАЖА ТЕЛА НАКАЛА ЭЛЕКТРИЧЕСКИХ ЛАМП НАКАЛИВАНИЯ | 1972 |
|
SU343322A1 |
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1971 |
|
SU301314A1 |
| УСТРОЙСТВО ДЛЯ ЗАКРУТКИ КОНЦОВ ПРОВОЛОКИ ВОКРУГ ЖГУТА | 1994 |
|
RU2095181C1 |
| Устройство для удаления перевясел со снопов стеблей лубяных культур | 1981 |
|
SU1030427A1 |
2ii i1
