1
Изобретение относится к области самолетовождения и пилотирования самолетов.
Известны способы выхода самолета на заданную линию пути разворотом на 180° с использованием автоматизированной системы управления, при котором первый разворот на 90° производят с максимальным углом крена.
Цель изобретения - уменьшение методической ошибки.
Это достигается тем, что делают замер боковой составляющей ветра к заданной линии пути я одновременно замер от клонения фактического значения воздушной скорости самолета от расчетной, а затем осуществляют второй разворот на 90° с углом крена, корректированным в зависимости от величины и знаков боковой составляющей ветра и отклонения воздущной скорости.
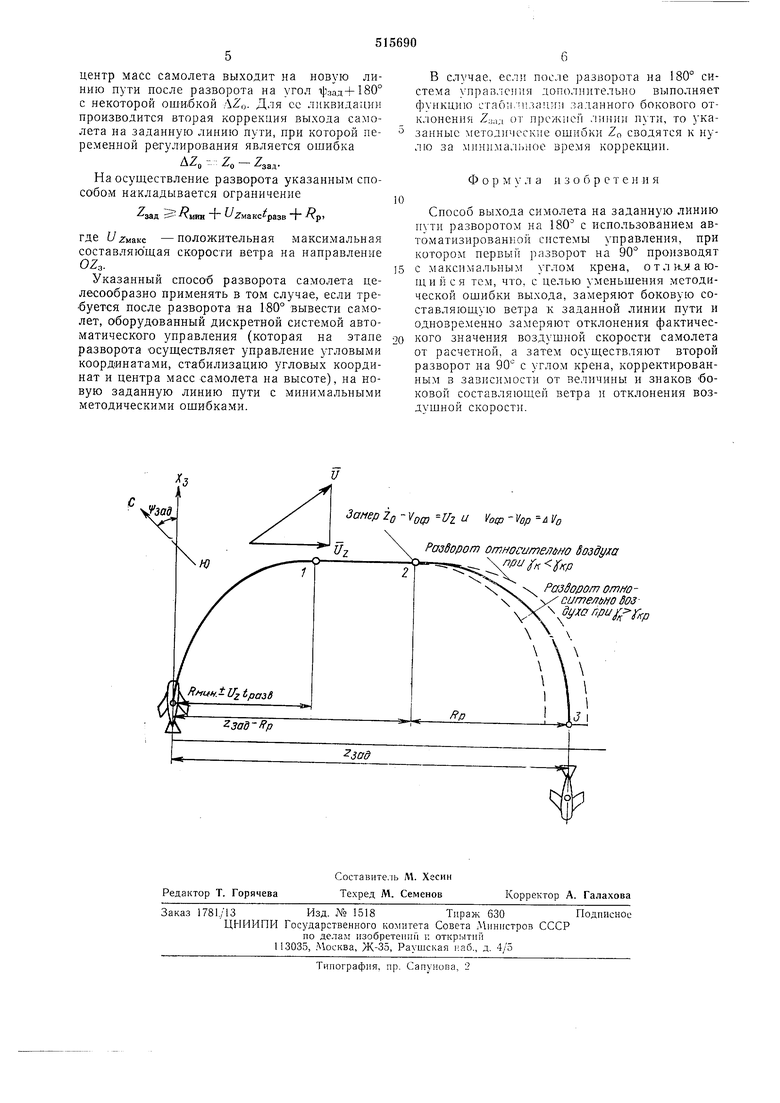
На чертеже показана схема выхода центра масс самолета на заданную линию пути при вводе коррекционного сигнала по углу крена.
На самолете имеется система автоматического управления, которая включает цифровую управляющую машину (ЦУМ). Системе управления могут задаваться различные программы разворота по углу крена. Кроме того, задана система координат , связанная с Землей. Относительно этой системы замеряется отклонение центра масс самолета Zg и .;корость отклонения ZQ.
Самолет движется с фактической воздушной скоростью Уоф, отличающейся от расчетной
Vop.
Требуется развернуть самолет на 180° по курсу с выходом на заданную линию пути, параллельную линии ОХз |И отстоящую от нее на заданном расстоянии 7зад при условии перемещения воздушных масс со случайным вектором и.
Цервый разворот осуществляется по жесткой программе с максимально допустимым углом крена умакс (минимальным радиусом разворота Кмак)- Разворот заканчивается в точке 1, отстоящей от линии ОХз на расстоянии в направлении OZg, равном
it 2 pasBi
где / м1ш-минимальный радиус разворота самолета при максимальном угле крена 7макс;
t/2 - модуль составляющей вектора ветра в напра1ВленииО2з; разЕ - время первого разворота на 90°. На участке от точки 1 до точки 2 самолет движется по прямой с курсом г17зад + 90°. Непрерывно осуществляется измерение бокового смещения Zo и скорости бокового смещения Z,|. В мо.мент (точка 2), когда разность
0
30 становится равной расчетному радиусу разворота при условии разворота самолета с некоторым расчетным углом крена 71Ф 7макс одновременно измеряются две разности; разность между составляющей путевой скорости самолета 2о в направлении OZa и фактической ъоздрушщой окоростью Vo(|), с какой летит самолет. Эта разность равна составляющей скорости воздушных масс Hz на направление О2з, т. е. 2o-Ko -f/z; разность между фактической воздущной скоростью Уоф и расчетной воздушной скоростью 1/„ф 1/„р: Д1/„. В зависимости от знаков И и ДУо и их величин в системе управления формируется программа разворота с коррекцией по углу крена. Методика определения требуемой коррекции программного угла крена при развороте предполагает использование ЦУМ. Предварительно моделированием движения самолета при развороте на 90° с варьированием программных углов крена укр и воздушной скорости полета Vo олределяются следующие зависимости: зависимость величины бокового смещения Zo относительно воздуха в функции программного значения угла крена YK при корректированном развороте с варьированием воздушной скорости полета самолета УО- Эта зависимость, например, при квантовании величины воздушной скорости м/сек и ее изменения в пределах Уо |50-56 м/сек при укр 18-30 зависимость значения времени второго разворота /2 в функции программных значений угла крепа 7кр с варьированием воздушной скорости самолета VQ. Если за номинальную (расчетную) воздушную скорость полета самолета принять ее возможное среднее значение Vop 53 м/сек, а за номинальную программу разворота - разворот с углом крена , то указанные выше зависимости позволяют получить дополнительно:отклонение бокового смещения AZo центра масс самолета от расчетного значения Zop в функции отклонения воздушной скорости А1/0 с варьированием угла крена ую отклонение времени второго разворота А/г от расчетного значения 2,р. в функции отклонения воздушной скорости АУо с варьированием угла крена ую отклонение бокового смещения AZo центра масс самолета от расчетного значения Zop - в функции отклонения угла крена Аук от расчетного значения КР с варьированием воздушной скорости полета УО. Последние три зависимости вводятся в память ЦУМ. При этом определение требуемого программного угла крена YK при развороте производится следук щим образом: из сравнивающего устройства в ЦУМ поступает величина отклонения АУо- На основанЙ зависимости А2о А2о(АУо) для 7г;р 24° определяется величина бокового отклонения AZofAFo;; при том же известном значении, АУо определяется отклонение времени разворота A/2,i в первом приближении для вычисляется относ самолета вместе с воздушными массами за все время разворота в первом приближении Z, гг.: Uz (4,р + .1); вычисляется суммарное отклонение центра масс самолета в первом приближении при развороте с расчетным углом крена и при наличии отклонения АУо и бокового ветра U AZ,, (AKo) + Z,; при известной фактической скорости самолета из зависимости AZo AZo(AYK) по вычисленному AZv; определяется в первом приближении требуемая поправка к углу крена Тк, и сам программный угол крена Тк1 Ткр ДТк1 который должен обеспечить отклонение AZo, противоположное по знаку отклонению AZ вычисленному согласно выражению AZs. AZe(AK,) + Z,. Далее осуществляется второй цикл вычислений:вычисляется отклонение времени разворота ,2 во втором приближении; вычисляется относ самолета вместе с воздушными массами за все время разворота во втором приближении Z : Uz (2,р + ,2); вычисляется суммарное отклонение во втором приближении AZ.;,:AZo(AKo) + -Z,; вычисляется поправка к углу крена AVK во втором приближении и сам программный корректированный угол крена при развороте Тк. Ткр + ДТк,Циклы сближения продолжаются до определения программного угла крена с заданной точностью. Цосле этого задается программа разворота с вычисленным корректированным углом крена ук, который учитывает боковой ветровой поток Иг и отклонение воздушной скорости АУо- Радиус разворота при этом относительно Земли остается близким к расчетному значению R. Вследствие наличия методических ошибок, вызванных квантованием корректированной программы по углу крена в зависимости от значения Uz и АУо тклонением фактического угла крена при развороте от заданной программой +AYK
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПОЛНЕНИЯ ЗАХОДА НА ПОСАДКУ | 2008 |
|
RU2364943C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ САМОЛЕТА | 1992 |
|
RU2025414C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| СПОСОБ ПРОГРАММНО-КОРРЕКТИРУЕМОГО СОПРОВОЖДЕНИЯ ЦЕЛИ | 2022 |
|
RU2795367C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ ОБУЧЕНИЯ ПИЛОТА ПОСАДКЕ САМОЛЕТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 2002 |
|
RU2225039C1 |
