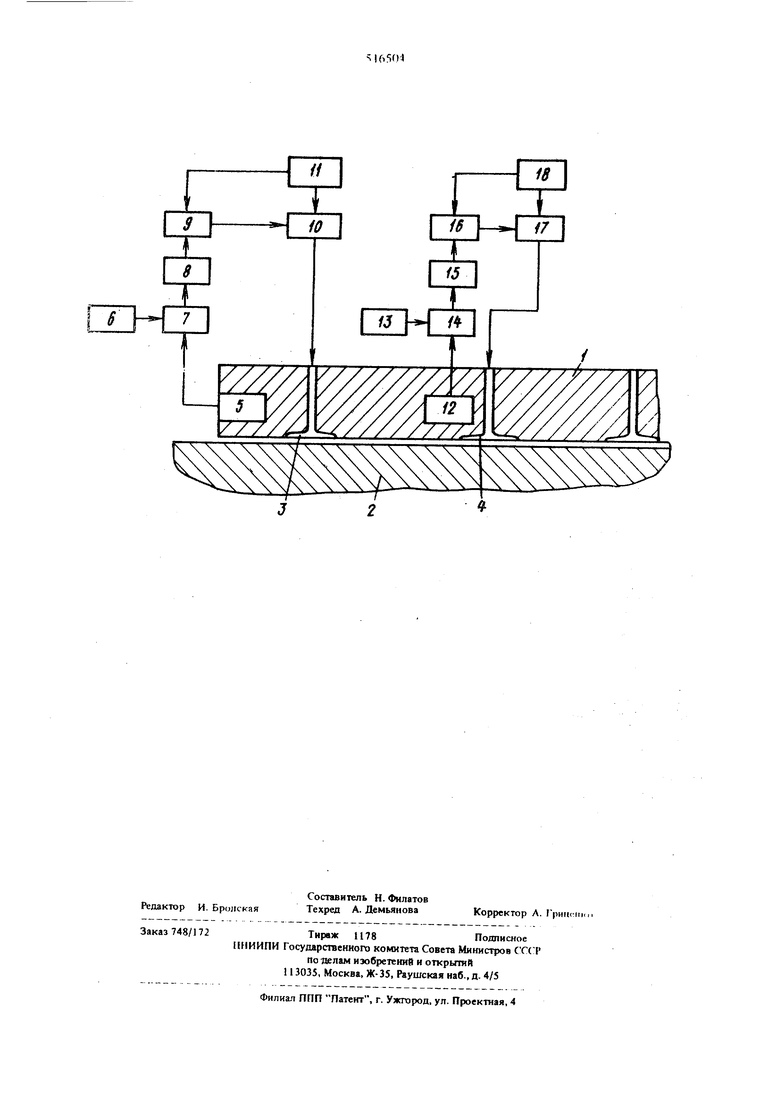
стола 1, имеют автономную систему функционального регулирования величийы контактного сближения, включающую в себя датчик 5 контактного давления направляющих стола 1 на направляющие станины 2, установлешшш на конце направляющей стола, задатчик 6, сравнивающее устройство 7, усилитель 8, электромеханический преобразователь 9, гидропереключатель 10 и гидронапорную установку 11.
По длине направляющей стола 1 в количестве зависящем от длнны направляющей стола, его жесткости и требуемой то шости, стабилизащш прямолинейности направляющих, помещены датчики 12 углового положения. Гидроопоры 4, расположенные в зонах действия датчиков 12, , имеют свою автономную систему регулирования, величину гидроразгрузки, включающую в себя датчик 12, задатЧик 13, сравгогоающее устройство 14, усилитель 15j электромеханический преобразователь 16, гидропереключатёль 17 и гидронапорную установку 18. .; .
Устройство работает следую1ц:им образом, При включении гидррнапорнбй установки 11 давление масла, поступа:ющ«гов гидроопоры 3,, возрастает до тех пор,; пока не будет достигнута заданная величина контактного давления и сигнал рассогласования на выходе сравнивающего устройства 7 между сигналом задатчика 6 и датчика 5 не станет равным нулю. При этом изменится контактное сближение направляющих стола 1 и станины 2 на концах стола, что приведет к изменению углового положения в вертикальной плоскости участка направляющей между датчиком 5 « датчиком 12,. которое будет последним зарегистрировано. Это вызьшает измене ше величины сигнала датчика, что приводит к появлению напряжения на Б 1ходе сравнивающего устройства 14. Сигнал последнего поступает на вход усилителя 15, выход которого управляет электромеханическим преобразователем 16. Преобразователь перемещает управляюищй элемент гидропереключателя 17, который регулирует давление масла в гидроопоре 4. Этот процесс будет протекать до тех пор, пока не будет восстановлено заданное угловое полоткение участка направляющих. При этом сигнал датчика 12 равен сигналу задатчика 13. На выходе сравнивающего устроиства 14 исчезает напряжение/.
движение элекфомехагоиеского преобразоза теля 16 прекратится и гидропереключатель будет поддерживать необходимую величину давления в шдроопоре 4. При всяком изменении нагрузок, действуюпдах на перемещающийся узел 1 или измене1ши его положения в пространстве, вызывающем изменение сигналов датчиков 5 и 12, автономные системы автоматического регулирования действзтот аналогичным образом, постоя1шо поддерживая заданную величину контактного сближения по концам направляющих и стабильность положения стола в вертикальной плоскости.
Формула изобретения
1.Устройство для разгрузки направляющих скольжения перемещающихся узлов машин, например станков, путем автоматической стабилизащш контактного сближения поверхностей направляющих, выполненное в виде нескольких автономных автоматически регулируемых систем гидроразгрузки, каждая из которых включает в себя датчик и задатчик взаимного положения сопряженных повёрхнйстей скольжения, выдающие свои. carHajjbi.в prtoK: сравнения с последующим вводом прлученно.гй на сигнала рассогласования в y(aijiHT«jn и узел преобразования злектр ического сигнала в изменении давления лисла между направляющими, отличающееся тем, что, с целью повыщения точиости положения в вертикальной плоскости направляющих и перемещающегося узла, в нем вьшолнены датчики контроля углового положения направляющих в вертикальной плоскости, размещенные по длине направляющих, каждый из которых подключен к собственной системе автоматического регулирования величины гидроразгрузки, взаимодействующей с выполненными системами автоматической стабилизации контактного сближения поверхностей о Датчиками, расположенными по концам направляюцрХ.
2.Устройство по п. 1,отличающ ееся тем, по датчики концевых систем стабили зацш контактного сближения выполнены в виде датчиков контактного давления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки направляющих скольжения перемещающихся узлов машин | 1975 |
|
SU593890A2 |
| В. В. Куйбышева и Куйбышевский завод координатно-расточных станков / | 1970 |
|
SU258809A1 |
| Система смазки гидростатических направляющих | 1978 |
|
SU751567A1 |
| Устройство автоматической разгрузки направляющих | 1981 |
|
SU982866A1 |
| Автоматическая система гидроразгрузки и стабилизации величины контактной деформации направляющих | 1973 |
|
SU480522A1 |
| Устройство для автоматической гидроразгрузки замкнутых направляющих | 1976 |
|
SU565807A1 |
| Автоматическая система гидроразгрузки и стабилизации величины контактной деформации поверхностей скольжения | 1972 |
|
SU437856A1 |
| Устройство автоматической разгрузки направляющих тяжелых узлов машин | 1974 |
|
SU490577A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU865612A1 |
| Прецизионная станина | 1980 |
|
SU991671A1 |