Цель изобретения - повышение точности положения рабочей поверхности узла.
Для этого предлагаемое устройство, снабн жепо цатчиком .ускорения, установленным на перемещаемом yaie, выход которого через 5 усигаттель .подключен ко входам элементов сравнения автоматических Систем гидрораэгрузки но положению рабочей поверхност узла встречно с выходами датчиков контроля углового положения.Ю
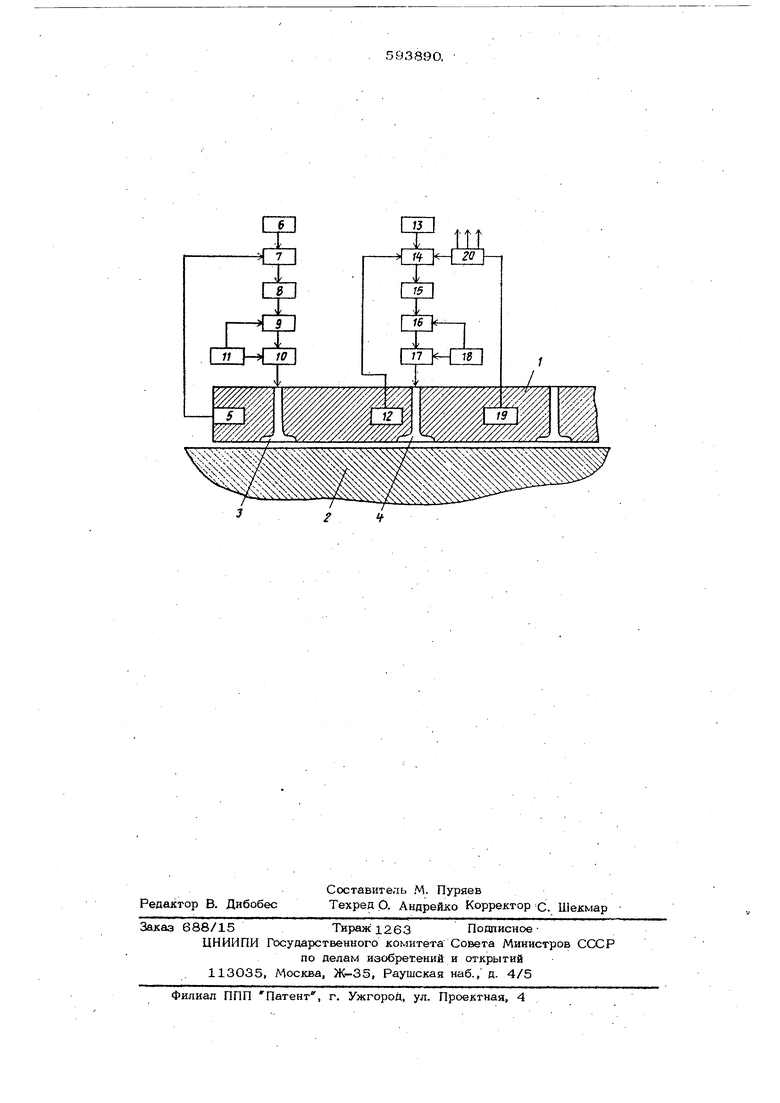
На чертеже дана конструктивно-блочная схема ог исываемого устройства.
Стол 1 установлен на нанравл5поших скольжения станины 2. На направляющих стола 1 расположено несколько гидроопор j 3 и 4, представляющих собой систему карманов или канавок:
Гиароопоры 3/ расположению на концах стола 1, снабжены автоматическими системами гидроразгрузки по контактному сбли- 20 жет1ию, содержат датчики 5 ;лсонтактного сближения направляющих стола 1 относительно направляюишх станины 2, задатчики 6,сравнивающие устройства 7, усилители 8, электромеханические преобразователи 9, 25 гидропереключатели 1О, гидронапорные уста-новкн 11,
Гидроопоры 4 оснащены автоматическими системами гидроразгрузки по попожению рабочей поверхности стопа, состоящими из JQ аатчиков 12 контроля углового положения, задатчиков 13, сравнивающих устройств 14, усилителей 15,. электромеханических преобразователей 16, гидроперекпючате лей 17, гидронапорных установок 18, а также 35 датчика 19 ускорения стола и усилителя 20 датчика ускорения.
Устройство работает следующим образом.
Автоматические системы гидроразгруз- ки по контактному сближению поддерживают.40 заданное контактное сближение (давление в зоне действия датчиков 5. При установившемся движении каждый датчик углового положения направляющ1гх выдает сигнал, соответствующий углу наклона контролируе-45 мого участка рабочей поверхности стола в вертикальной плоскости в направлении перемещения. В устройстве 14 происходит алгебраическое суммирование сигналов задат- и датчика 12 и на его выходе 50 образуется сигнал ошибки, пропорциональный отклонению действительного наклона от .заЬанного. Сигнал ошибки поступает через усилитель 15 на электромеханический преобразователь 16, которой изменяет состояние гидропереключатепя 17, что tjbэывает Изменение давления в гидроопоре 4 и изменение наклона соответствующего участка стола в сторону уменьшения сиг нала ошибки. Сигнал на выходе датчика 19 ускорения при этом отсутствует и он не елияет на работу устройства. При неустановившемся движении стола каждый датчик 12 выдает сигнал, являющийся алгебраической суммой двутс -его составляющих.
Первая составляющая сигнала соотвеч |Ствует углу наклона контролируемого участка стола, вторая составляющая пропорциональна ускорению стола. Датчик 19 усКорёния в этом случае также выдает сигнал, пропорциональный ускорению стола. Этот си1 нал через усилитель 20 подается на вход каждой автоматической системы гидрораз- грузки по положению рабочей поверхности и компенсирует вторую составляющую сигнала датчика 12, обусловленную изменением скорости подвижного узла.
При применении- на тяжелых продольно-,., фреоерных станках в качестве датчиков конроля углового положения электронных уровней мод. 152 инерционная составляющая сигнала датчика в переходных режимах достигает величины полезного сигнала и може превосходить его, поэтому предлагаемое устройство позволит значительно повысить точность работы системы гидроразгрузки направляющих.
Формула изобретения
Устройство для разгрузки направляющих скольжения перемещающихся узлов машин по авт. св. ;№ 516504, отличающееся тем. что, с целью повышения точности положения рабочей поверхности узла, устройство снабжено датчиком ускорения, выход которого через усилитель подключен ко входам элементов сравнения автоматических систем гидроразгрузки по положению рабочей поверхности узла встреч- НР с выходами датчиков контроля углового положения.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство К% 516504, кл. В 23Q1/02, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки направляющих скольжения перемещающихся узлов машин | 1976 |
|
SU516504A1 |
| В. В. Куйбышева и Куйбышевский завод координатно-расточных станков / | 1970 |
|
SU258809A1 |
| Система смазки гидростатических направляющих | 1978 |
|
SU751567A1 |
| Устройство автоматической разгрузки направляющих | 1981 |
|
SU982866A1 |
| Автоматическая система гидроразгрузки и стабилизации величины контактной деформации направляющих | 1973 |
|
SU480522A1 |
| Устройство для автоматической гидроразгрузки замкнутых направляющих | 1976 |
|
SU565807A1 |
| Автоматическая система гидроразгрузки и стабилизации величины контактной деформации поверхностей скольжения | 1972 |
|
SU437856A1 |
| Устройство автоматической разгрузки направляющих тяжелых узлов машин | 1974 |
|
SU490577A1 |
| СТАНОК ПОРТАЛЬНОГО ТИПА С УСТРОЙСТВОМАВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ УПРУГИХПЕРЕМЕЩЕНИЙ | 1972 |
|
SU427832A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU865612A1 |