1
Изобретение относится к скобосшивным головкам и может быть использовано преимущественно в деревообрабатывающей промышленности.
Известен механизм вдавливания П-образных скоб к скобосшивной головке, включающий направляющие с ограничителями и пуансон с Г-образным подпружиненным захватом, кулачки которого в процессе работы взаимодействуют с ограничителями направляющих.
Недостатком известного механизма является низкая производительность.
Целью изобретения является повышение производительности.
Достигается это тем, что механизм снабжен дополнительным пуансоном с Г-образным подпружиненным захватом, расположенным под углом относительно основного пуансона, причем пуансоны смещены относительно дрзг друга в вертикальной плоскости на величину диаметра перемычки скобы, а подпружиненные захваты выполнены с продольными ограничительными пазами и снабжены дополнительными упругими элементами, например пружинами, причем торцы горизонтальных полок Г-образных захватов выполнены с углублениями и обращены друг к другу.
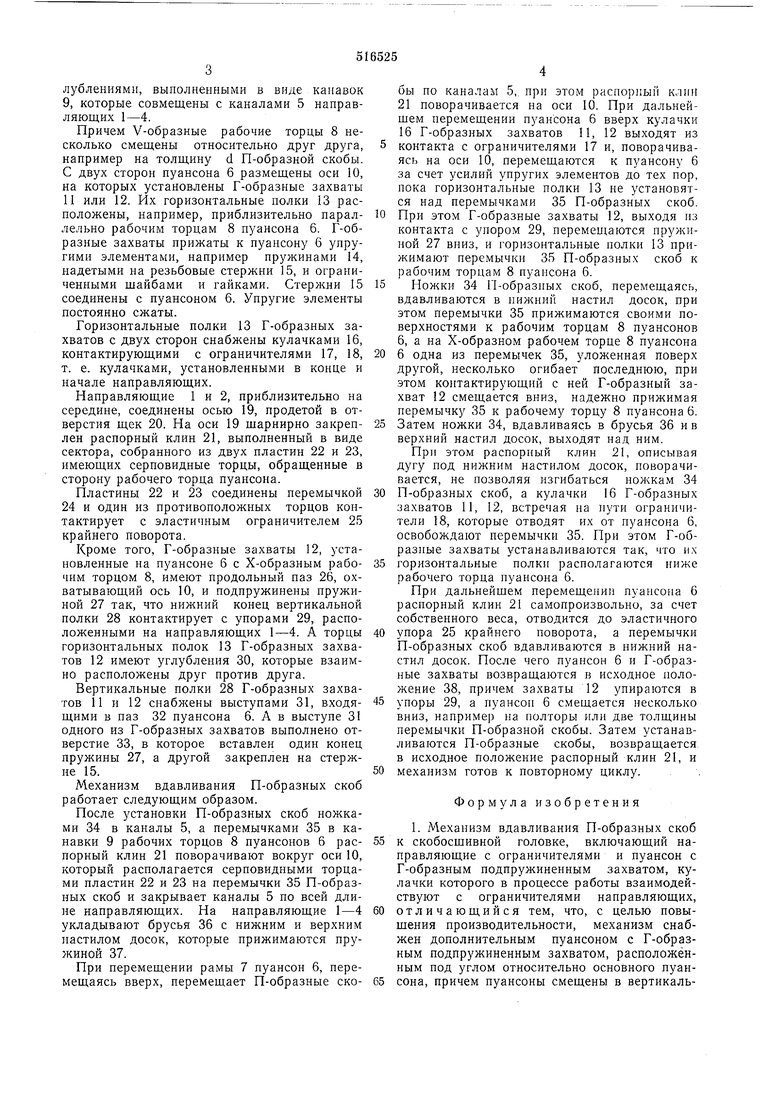
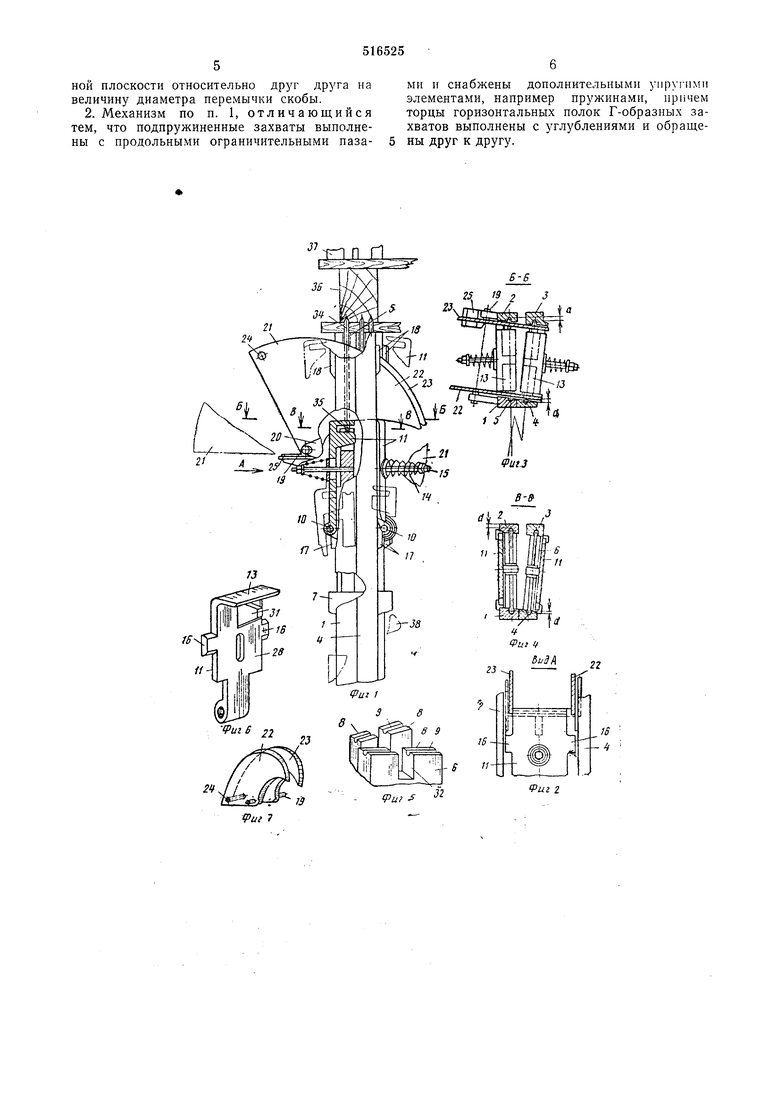
На фиг. 1 изображен предлагаемый механизм с V-образным рабочим торцом пуансона; па фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. 1; на фиг. 4 - разрез по В-В на фиг. 1 (вид сверху со смещением рабочих торцов нуансона и направляющих); на фиг. 5 - пуансон с V-образным рабочим торцом; на фиг. 6-Г-образный захват к V-образному рабочему торцу пуансона; на фиг. 7 - распорный клин для пуансона с V-образным рабочим торцом пуапсона; на фиг. 8 - механизм с Х-образным рабочим торцом пуансона; на фиг. 9 - вид по стрелке Г на фиг. 8; на фиг. 10 - разрез по Д-Д на фиг. 8; на фиг. 11 - разрез по Е-Е на фиг. 8; на фиг. 12 - пуансон с Х-образным
рабочим торцом; на фиг. 13 - Г-образный захват к пуансону с Х-образпым рабочим торцом; на фиг. 14 - взаиморасположение перемычек П-образных скоб (на Х-образном рабочем торце пуансона).
Механизм вдавливания П-образных скоб включает в себя четыре вертикальные направляющие 1-4, имеющие противоположно расположенные каналы 5. Между направляющими расположен пуансон 6, нижняя часть
которого соединена, например, с подвижной рамой 7, опирающейся на штоки гидроцилиндров (на чертежах пе показаны).
Рабочие торцы 8 пуансона 6 контактируют с П-образной скобой, при этом пересекаются
и образуют V- илн Х-образную форму с углублениями, выполненными в виде канавок 9, которые совмещены с каналами 5 направляющих 1-4.
Причем V-образные рабочие торцы 8 несколько смещены относительно друг друга, например на толщину d П-образной скобы. С двух сторон пуансона 6 размещены оси 10, на которых установлены Г-образные захваты 11 или 12. Их горизонтальные полки 13 расположены, например, приблизительно параллельно рабочим торцам 8 пуансона 6. Г-образные захваты прижаты к пуансону 6 упругими элементами, например пружинами 14, надетыми на резьбовые стержни 15, и ограниченными шайбами и гайками. Стержни 15 соединены с пуансоном 6. Упругие элементы постоянно сжаты.
Горизонтальные полки 13 Г-образных захватов с двух сторон снабжены кулачками 16, контактирующими с ограничителями 17, 18, т. е. кулачками, установленными в конце и начале направляющих.
Направляющие 1 и 2, приблизительно на середине, соединены осью 19, продетой в отверстия щек 20. На оси 19 щарнирно закреплен распорный клин 21, выполненный в виде сектора, собранного из двух пластин 22 и 23, имеющих серповидные торцы, обращенные в сторону рабочего торца пуансона.
Пластины 22 и 23 соединены перемычкой 24 и один из противоположных торцов контактирует с эластичным ограничителем 25 крайнего поворота.
Кроме того, Г-образные захваты 12, установленные на пуансоне 6 с Х-образным рабочим торцом 8, имеют продольный паз 26, охватывающий ось 10, и подпружинены пружиной 27 так, что нижний конец вертикальной полки 28 контактирует с упорами 29, расположенными на направляющих 1-4. А торцы горизонтальных полок 13 Г-образных захватов 12 имеют углубления 30, которые взаимно расположены друг против друга.
Вертикальные полки 28 Г-образных захватов 11 и 12 снабжены выступами 31, входящими в паз 32 пуансона 6. А в выступе 31 одного из Г-образных захватов выполнено отверстие 33, в которое вставлен один конец пружины 27, а другой закреплен на стержне 15.
Механизм вдавливания П-образных скоб работает следующим образом.
После установки П-образных скоб ножками 34 в каналы 5, а перемычками 35 в канавки 9 рабочих торцов 8 пуансонов 6 распорный клин 21 поворачивают вокруг оси 10, который располагается серповидными торцами пластин 22 и 23 на перемычки 35 П-образных скоб и закрывает каналы 5 по всей длине направляющих. На направляющие 1-4 укладывают брусья 36 с нижним и верхним настилом досок, которые прижимаются пружиной 37.
При перемещении рамы 7 пуансон 6, перемещаясь вверх, перемещает П-образные скобы по каналам 5,. при этом распорный клин 21 поворачивается на оси 10. При дальнейшем перемещении пуансона 6 вверх кулачки 16 Г-образных захватов 11, 12 выходят из контакта с ограничителями 17 и, поворачиваясь на оси 10, перемещаются к пуансону 6 за счет усилий упругих элементов до тех пор, пока горизонтальные полки 13 не установятся над перемычками 35 П-образных скоб. При этом Г-образные захваты 12, выходя из контакта с упором 29, перемещаются пружиной 27 вниз, и горизонтальные полки 13 прижимают перемычки 35 П-образных скоб к рабочим торцам 8 пуансона 6.
Пожки 34 П-образных скоб, перемещаясь, вдавливаются в нижний настил досок, при этом перемычки 35 прижимаются своими поверхностями к рабочим торцам 8 пуансонов 6, а на Х-образном рабочем торце 8 пуансона 6 одна из перемычек 35, уложенная поверх другой, несколько огибает последнюю, при этом контактирующий с ней Г-образный захват 12 смещается вниз, надежно прижимая перемычку 35 к рабочему торцу 8 пуансона 6. Затем ножки 34, вдавливаясь в брусья 36 и в верхний настил досок, выходят над ним.
При этом распорный клин 21, описывая дугу иод нижним настилом досок, поворачивается, не позволяя изгибаться ножкам 34 П-образных скоб, а кулачки 16 Г-образных захватов 11, 12, встречая на пути ограничители 18, которые отводят их от пуансона 6, освобождают перемычки 35. При этом Г-образные захваты устанавливаются так, что и.х горизонтальные полки располагаются ниже рабочего торца пуансона 6.
При дальнейшем перемещении пуансона 6 распорный клин 21 самопроизвольно, за счет собственного веса, отводится до эластичного упора 25 крайнего поворота, а перемычки П-образных скоб вдавливаются в нижний настил досок. После чего пуансон 6 и Г-образные захваты возвращаются в исходное положение 38, причем захваты 12 упираются в упоры 29, а пуансоп 6 смещается несколько вниз, например на полторы или две толщины перемычки П-образной скобы. Затем устанавливаются П-образные скобы, возвращается в исходное положение распорный клин 21, и механизм готов к повторному циклу.
Формула изобретения
1. Механизм вдавливания П-образных скоб к скобосщивной головке, включающий направляющие с ограничителями и пуансон с Г-образным подпружиненным захватом, кулачки которого в процессе работы взаимодействуют с ограничителями направляющих, отличающийся тем, что, с целью повыщения производительности, механизм снабжен дополнительным пуансоном с Г-образным подпружиненным захватом, расположённым под углом относительно основного пуансона, причем пуансоны смещены в вертикальНОИ плоскости относительно друг друга на величину диаметра перемычки скобы. 2. Механизм по п. 1, отличающийся тем, что подпружиненные захваты выполнены с продольными ограничительными паза- 5 ми и снабжены дополнительными упругими элементами, например пружинами, причем торцы горизонтальных полок Г-образных захватов выполнены с углублениями и обращены друг к другу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Скобосшивной станок для соединения деревянных поддонов | 1974 |
|
SU516523A1 |
| Механизм вдавливания п-образных скоб | 1974 |
|
SU492388A1 |
| Поточно-механизированная линия сшивки поддонов | 1976 |
|
SU655531A1 |
| Скобосшивной станок для соединения деревянных поддонов | 1976 |
|
SU548418A2 |
| Устройство для механического вдавливания @ -образных скоб | 1981 |
|
SU1061363A1 |
| Скобосшивной станок для соединения деревянных поддонов | 1976 |
|
SU574325A2 |
| Устройство для механического вдавливания П-образных скоб | 1985 |
|
SU1248800A1 |
| Линия изготовления и ремонта деревянных поддонов | 1985 |
|
SU1258693A1 |
| Поточно-механизированная линия сшивки поддонов | 1974 |
|
SU516524A1 |
| Скобосшивной станок для соединения деревянных поддонов П-образными скобами | 1981 |
|
SU950523A1 |
Г1
В-Б
Фиг 2
J2
qPui -f
Рш. 73
Д-Д
(рш 9
VU2 П
