(54) УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ГРУЗОВ В МОРЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| ГИДРОПРИВОД ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2005 |
|
RU2289038C1 |
| Система передачи груза с судна на судно | 1980 |
|
SU935372A1 |
| Лебедка для передачи грузов с судна на судно | 1977 |
|
SU695958A1 |
| Натяжное устройство | 1980 |
|
SU893699A2 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА НА ПАЛУБЕ КОРАБЛЯ, ПРЕИМУЩЕСТВЕННО ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2141435C1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
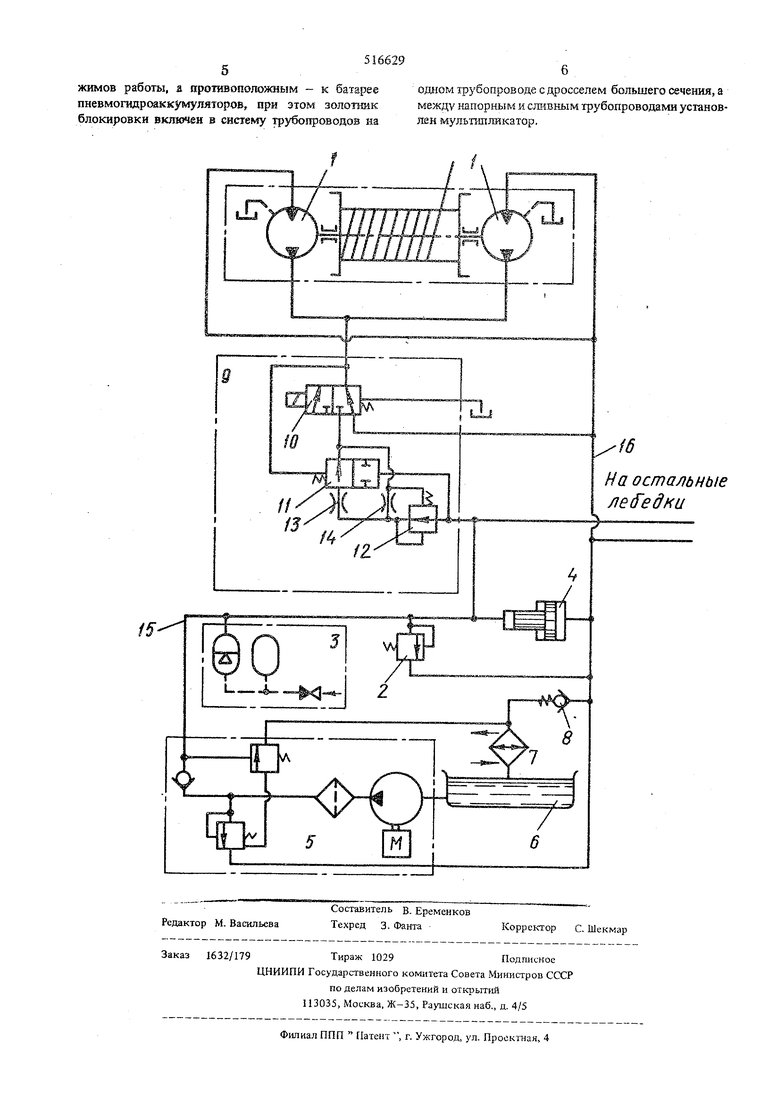
Изобретение относится к области грузоподъемных механизмов, а именно к устройствам для передачи грузов в море. Известны устройства для передачи грузов в море, содержащие несущий канат, навитый на барабан лебедки, гидромоторы, связанные посредством системы трубопроводов и блока регулирования и управления с батареей пневмогидроаккумуЛяторов, заряжаемых от насосного агрегата поддитки с автоматом разгрузки, гидравлически связанного посредством маслоохладителя и регулирующей аппаратуры с циркуляционным баком. Однако эти устройства требуют длительного времени для постановки канатной дороги для передачи грузов, так как включение насосного агрегата подпитки возможно только после закрепления несущего каната на принимающем судне. Предварител ное включение агрегата подпитки недопустимо, так к подключение гидромоторов лебедки, находящейся без нагрузки, к заряженным пневмогидроаккумуляторам. вызовет резкое натяжение каната и выход устройства из строя. Для сокращения времени постановки канатной дороги необходимо значительное увеличение мощности насосного агрегата . Целью изобретения является сокращение времени постановки канатной дороги и снижение мощности насосного агрегата. Для этого блок регулирования и управления содержит гадравлически связанные между собой электромагнитный золотник переключения режимов работы, установленные параллельно два дросселя с неодинаковым сечением, нормально открытый регулятор перепада давле1шя, снабженный каналами, гидравлически связывающими его торцы с рубопроводом до и после дросселей и нормально открытый золотник блокировки, одним концом подключенный к системе тр бопроводов между гидромоторами лебедки и электромагнитным золотником переключения режимов работы, а противоположным - к батарее пневмогадроаккумуляторов, при этом золотник блокировки включен в систему трубопроводов на одном трубопроводе с дросселем большего сечения, а между напоррым и сливным трубопроводами установлен мультипликатор. На чертеже представлена принципиальная гидравлическая схема предлагаемого устройства. Гидропривод устройства состоит из собствснпо лебедки 1 с гидромоторами предохранительного
клапана 2, батареи пневмогидроаккумуляторов 3, мультипликатора 4, насосного агрегата подпитки 5 с автоматом разгрузки, циркуляционного бака 6, маслоохладителя 7, подпорного клапана 8 и блЪка регулирования и управления 9,
Блок регулирования и унравле гя1я 9 состоит яз электромагнитного золопшка 10 переключения режимов работы, золошдаса 11 блокировки, регулятора 12перег ада.да8ле1шя51юст4эж1йЗ;:х5рс Сх; «й 13 и 14 (соответственно большого и малого сечения).
Золотник 10 в исходном положении под действием пружины удерживается в положении, при котором батарея пневмогидроаккумуляторов 3 от сечена от гадромоторов лебедаси, а последние закольцованы на контур низкого давления. Золотник 11 блокировки, установленный последовательно в линии дросселя 13 большого сечеши, удерживается пружиной в открытом положении, а торцы связаны каналами: левый с гидромоторами лебедки 1, правый - с батареей пневмогидроаккумуляторов 3 с напорным трубопроводом 15, с которым соединен такж мультипликатор 4, связанный полостью низкого давления со сливным трубопроводом 16.
Регулятор 12 перепада давления также удерживается пружиной в открытом положении и связан каналами с трубопроводом до дросселей и после них.
Устройство работает следуюишм образом. При включении насосного агрегата подпитки 5
производится зарядка батареи пневмогидроаккумуляторов 3.
При этом золотник 11 блокировки под действием перепада давления, возникающего на его торцах, преодолевая усилие пружинь, перемещается влево, закрывая ветвь дросселя 13 большого сечения. Затем после срабатывания автомата разгрузки и перехода насосного агрегата подпитки в режим холостого хода, происходит заполнение маслом полости низкого давления мультипликатора 4.
После заполнения мультипликатора, масло, нагнетаемое насосным агрегатом подпитки 5, через подпорный клапан 8 и маслоохладитель 7 сливается в циркулядиошшй бак 6. В таком состоящш заканчивается подготовка устройства к работе.
После закрепления несущего каната переключением 3лектромагнитного золотника 10 гидромоторы лебедки 1 соединяются с батареей пневмогидроаккумуляторов 3.
При зтом лебедка 1 начишет вращаться с малой скоростью, определяемой проходным сечением дросселя 14.
По мере подъема натяжения в несущем канате, вызываемого вращением лебедки 1, растет давление в гидромоторах и левой полоста управления золотника 1. Когда разница между давлением в батарее пневмогидроаккумуляторов и давлением в гидромоторах достигает незначительной величины (порядка 8-10 кгс/см), пружина золотника 11 блокировки возвращает его в правую сторону,
обеспечивая через оба дросселя 13 и 14 свободное соединение батареи пневмогидроаккумуляторов с лебедкой без какого-либо удара и толчка.
Регулятор 12 по.ддерживает постояшй.1Й перепад давления на дросселях 13 и 14, обеспечивая независимость расхода от нагрузки. Аналогично происходит подключение любой другой лебедкя.
Дальнейшая работа устройства происходит следующим образом. Прк расхождении точек подвеса несущего каната лебедка 1 вращается в сторону изматывания каната, засасывая гидромоторами масло из мультипликатора 4 и нагнетая его в батарею пневмогидроаккумуляторов 3.
При переполнении батареи пневмогидроаккумуляторов избыток масла сбрасывается предохранительным клапаном 2.
При схождении точек подвеса масло из батарти
пневмоаккумуляторов поступает на гидромоторы,
которые,вращая барабан лебедки I, выбирают несущий канат. При зтом происходит зарядка полости
низкого давления мультипликатора 4.
Для компенсации потерь масла в батарее пневмогидроаккумуляторов по команде разгрузки периодически происходит включение насосного агрега та подпитки 5.
В случае обрыва несущего каната расход масла, поступающего из батареи пневмогидроаккумуляторов 3 на гидромоторы лебедки ограничивается дросселями 13,14 и давление между блоком регулирования и управ;ге1дая 9 и ; ебедкой резко падает, что вызывает переключение иолотника 11 блокировки влево, и снижение скорости выборки несущего каната до малой величины, безопасной для
обслуживающего персонала.
Формула изобретения
Устройство для передачи грузов в морс, содержащее несущий канат, навитый на барабан лебедки, гидромоторы, связа(шые посредством системь трубопроводов и блока регу;шрования и управления с батареей пневмогидроаккумуляторов, заряжаемых от шсосного агрегата подпитки с автоматом разгрузки, гидравлически связанного посредством маслоохладителя и регулирующей агшаралуры с ииркулядионным баком, отличающееся тем, что, с целью сокращения времени постановки канатной дороги и сшгжения мощности насосного
агрегата, блок регулирования и управления содержит гидравлически связанные между собой злектромагнитный золотник переключения работы, установленные параллель}1одвадроссе;1я с неодинаковым сечением, нормально открьгтьш рсгулитор перепада давления, снабженный каналами, гидравлически связьшающими его торцы с трубопроводом до и после дросселей и нормально открр,ть1Й золотник блокировки, одним концом подключеннь Й к системе трубоирозодон между гидромоГорами лебедки и
электро.магнитным чолотннком кереключения {ж
