(54) ШАГАЮЩИЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 1969 |
|
SU239852A1 |
| ЩИЙ КОЙВЁЙЁР для ТРАНСПОРТИРОВАНИЯ И | 1968 |
|
SU232114A1 |
| Шагающий конвейер | 1978 |
|
SU751728A1 |
| Шагающий конвейер | 1983 |
|
SU1094816A1 |
| КОНВЕЙЕР ДЛЯ ВЫГРУЗКИ ЛЕСОМАТЕРИАЛОВ ИЗ ВОДЫ | 1992 |
|
RU2019479C1 |
| Шаговый конвейер | 1980 |
|
SU933571A1 |
| Шагающий конвейер | 1983 |
|
SU1117260A1 |
| Шагающий конвейер-перегружатель | 1980 |
|
SU929513A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2009 |
|
RU2410315C1 |
Изобретение относится к промышленному транспорту, а именно к шагающим конве:йерам..,
V Известны шагающие конвейеры, содёр- , жащие неподвижную раму и подвижную parму, прикрепленную к кривошипам, расположенным взаимно параллельно, причем один ,из них соединен с приводом.
Однако известные конвейеры |имеют ма-i. лую скорость транспортирования груза и i требуют мощного привода, так как подвижная рама нёуравнбвешена и находящиеся на ней грузы снимакпгся одновременно.
Цель изобретения - повышение скорости перемещения груза.
Это, достигается тем, что подвижная; рама выполнена из балок, попарно соединенных с помощью сдвоенных кривошипов, а неподвижная рама наклонена в сторону загрузки конвейера..
.
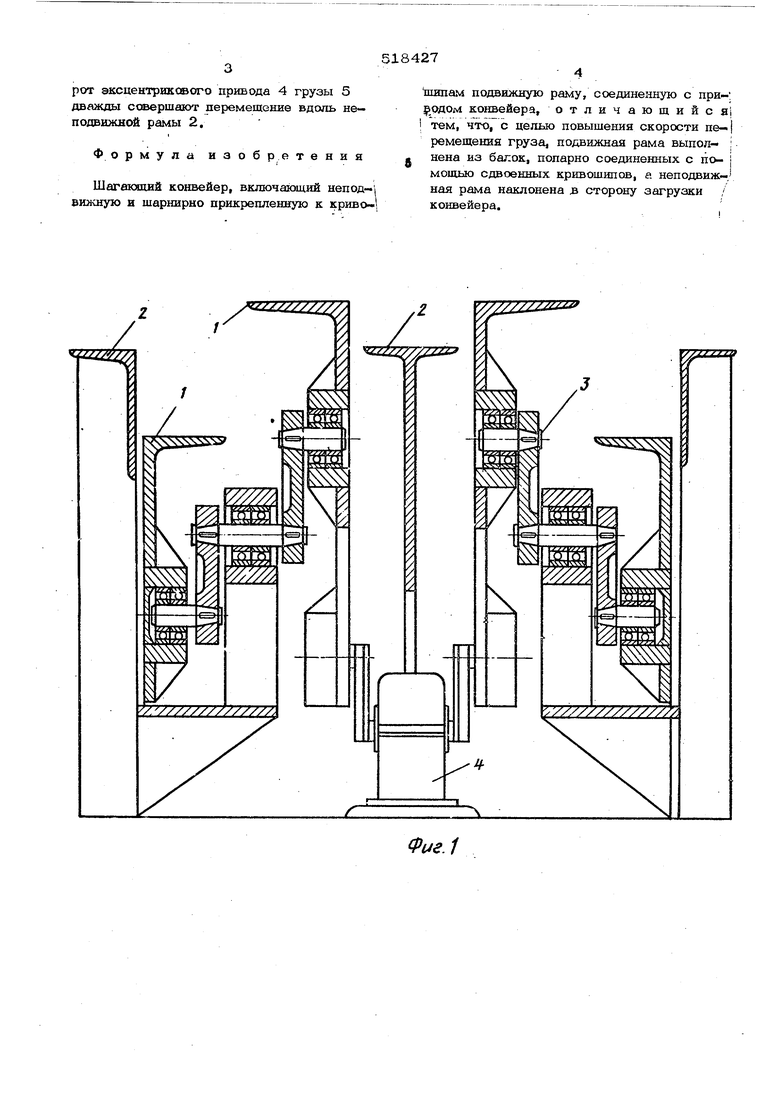
На фиг. 1 изображен предлагаемый шагающий конвейер, поперечный разрез; на фиг. 2 - кинематическая схема; на фиг. 3траектория перемещения груза.г
Шагаюишй кскюейер состоит из четырех взаимноуравновешенных брусьев подвижной рамы 1, брусьев неподвижной рамы 2, сдвоенных кривошипов 3 и эксцентрикового привода 4.
Каждый брус подвижной рамы 1 крепится к двум кривошипам через подшипники качения.
Для уменьшения влияния динамической нагрузки в момент подъема грузов 5 подвижной рамой 1 и опускания их на неподвижную раму 2, последняя устанавливаеп ся под углом к подвижной.
Груз 5 укладывается на неподвижную раму 2.1 При Вращении эксцентрикового привода 4 конвейера подвижные брусья 1 бу-г дут совершать круговые колебательные движения с радиусом крив{Х1шпа.
Грузы 5, находящиеся на неподвижной |раме 2, последовательно, один за другим I снимаются подвижной рамой 1, а затем .последовательно опускаются на неподвиж- ную раму 2, перемещаясь по дугам окружности. Затем цикл пгавторнется. За один эксцентрикового привода 4 грузы 5 дважды совершают перемещение вдоль неподвижной рамы 2.
Формула иаобретения
Шагакщий конвейер, включающий непод-i вижную и шарнирно прикрепленную к криво ипам подвижную раму, соединенную с конвейера, отличающийся I тем, что, с целью повыщения скорости перемещения груза, подвижная рама выполнена из балок, попарно соединенных с помощью сдвоенных кривошипов, а неподвиж-, ная рама наклонена js сторону загрузки конвейера.
.f Jг L / m
Фиг. 2
