Известны Шагающие конвейеры для транспортирования и сборки изделий, например литейных форм, содержаш,ие подвижную и неподвижные рамы, привод для перемещения подвижной рамы и механизм подъема и опускания ее.
Предложенный конвейер отличается от известных тем, что подвижная и неподвижные рамы выполнены в виде балок со стойками, между которыми имеются свободные пространства для входа загрузочных или разгрузочных конвейеров.
Это обеспечивает непосредственную выдачу и прием изделий с загрузочных или разгрузочных конвейеров, расположенных иод углом к оси шагающего конвейера.
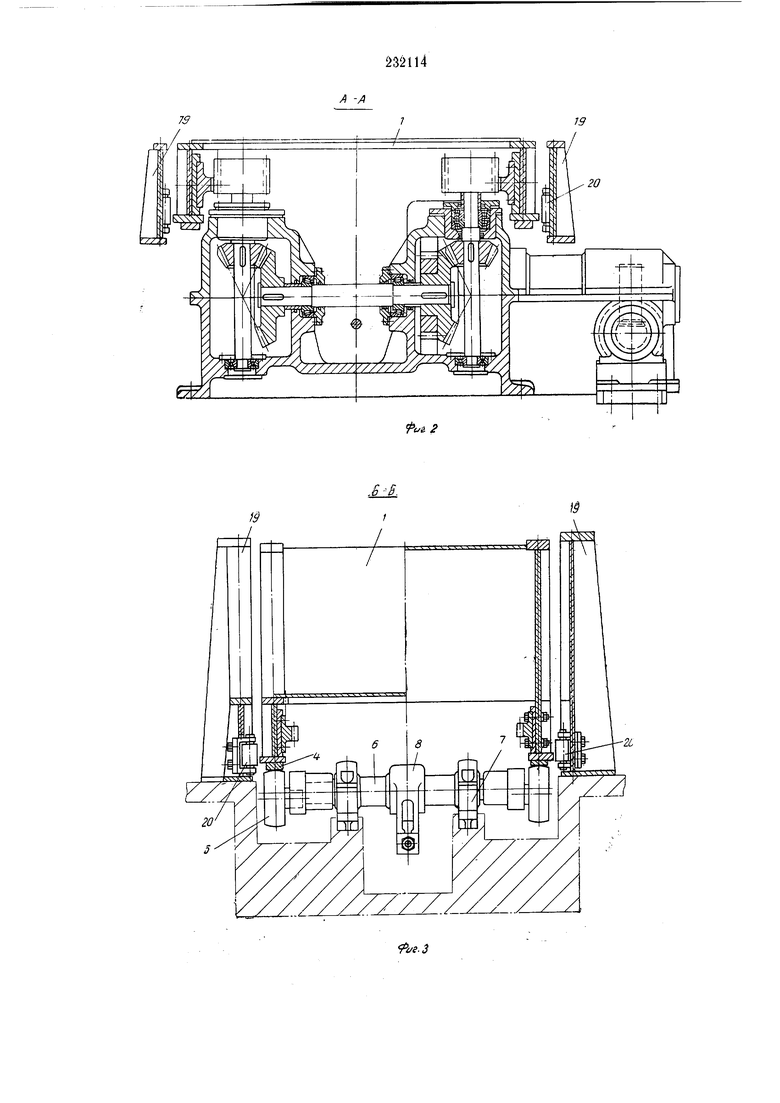
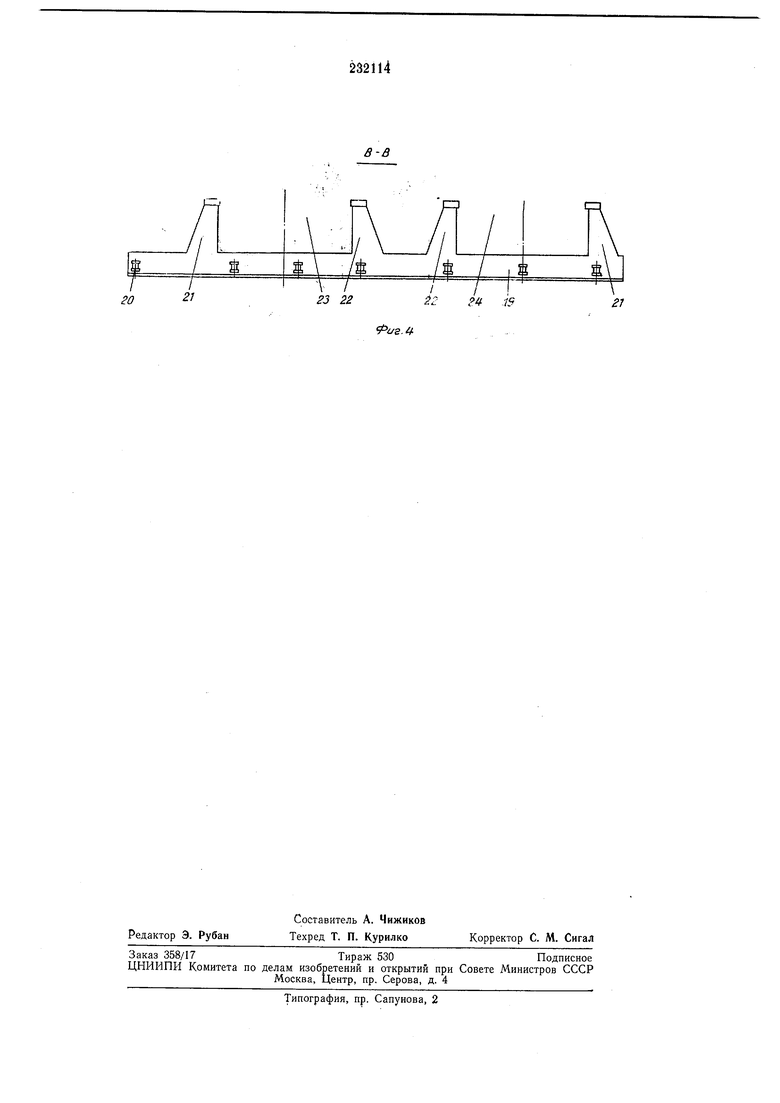
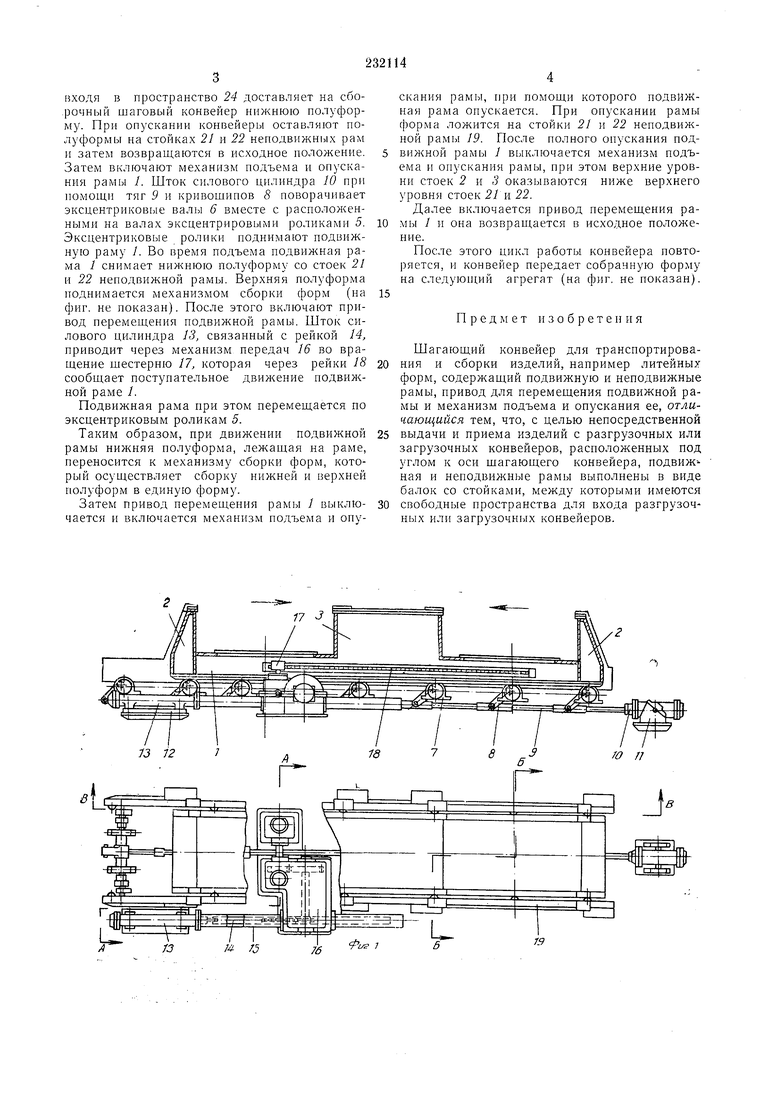
На фиг. 1 схематически изображен предлагаемый конвейер в двух ироекииях; на фиг. 2 - разрез по Л-А на фиг. 1, на фиг. 3 - разрез по Б-Б на фиг. 1; на фиг. 4 - разрез по В-В на фиг. 1.
Подвижная рама / конвейера представляет собой балку со стойками 2 и 3. Плечиками 4 рама J опирается на эксцентриковые ролики 5 механизма подъема и оиускания подвижной рамы. Механизм подъема и опускания рамы имеет несколько эксцентриковых валов 6. На каждом валу укреплены два эксцентриковых ролика 5. Опоры 7 вала стоят на фундаменте. В опорах смонтированы подшипники вала. Вал
поворачивается прп помощ) кривошипов 8, смонтированных на валах. Кривошипы 8 присоединены к тягам 9, приводимым в движение силовым цилиндром 10, установленным на
опоре и. Рама 1 совершает возвратно-поступательное движение при помощи привода для ее перемещения. Привод состоит из смонтированного на опоре 12 силового цилиндра J3 с присоединенной к нему рейкой 14, заключеиной в кожух 15. Рейка 14 приводпт через механизм передач 16 во вращение шестерни /7, находящиеся в зацеплении с рейками 18. Рейки прикреплены к раме 1.
По краям подвижной рамы / установлены
неподвижные рамы 19 с направляющими роликами 20. Неподвижные рамы представляют собой балки со стойками 21 и 22. Между стойками имеются свободные пространства 2,3 и 24, так же как и между стойками 2 и 3 подвижной рамы.
В начале работы стойки 2 и 3 подвижной рамы 1 находятся иротив стоек 21 и 22 неподвижной рамы 19. Верхний уровень стоек 21 и 22 в это время выше верхнего уровня стоек 2
и 3. Перпендикулярно сборочному шагающему конвейеру расположены два загрузочных конвейера (на фиг. не показаны), подающих полуформы. Одпн загрузочный конвейер, входя в пространство 23, доставляет на сборочвходя в пространство 24 доставляет на сбо.рочный шаговый конвейер нижнюю нолуформу При опускании конвейеры оставляют полуформы на стойках 21 и 22 неподвпжных рам и затем возвращаются в исходное положение. Затем включают механизм подъема и опускания рамы /. Шток силового цилиндра 10 при помощи тяг 9 и кривощипов 8 поворачивает эксцентриковые валы 6 вместе с расположенными на валах эксцентрировыми роликами 5. Эксцентриковые ролики поднимают подвижную раму /. Во время подъема подвижная рама / снимает нижнюю полуформу со стоек 21 и 22 неподвижной рамы. Верхняя иолуформа поднимается механизмом сборки форм (на фиг. не показан). После этого включают привод перемещения подвижной рамы. Шток силового цилиндра 13, связанный с рейкой М, приводит через механизм передач 16 во вращение шестерню 17, которая через рейки /« сообщает поступательное движение подвижной раме /.
Подвижная рама при этом перемещается по эксцентриковым роликам 5.
Таким образом, при движении подвижной рамы нижняя полуформа, лежащая на раме, переносится к механизму сборки форм, KOTOJ рый осуществляет сборку нижней и верхней полуформ в единую форму.
Затем привод перемещения рамы / выключается и включается механизм подъема и оиуекания рамы, при помощи которого подвижная рама опускается. При опускании рамы форма ложится на стойки 21 и 22 неподвижной рамы 19. После полного опускания подвижной рамы 1 выключается механизм подъема и опускания рамы, при этом верхние уровни стоек 2 и 3 оказываются ниже верхнего уровня стоек 2/ и 22.
Далее включается привод перемещения рамы / и она возвраи ается в исходное положение.
После этого цикл работы конвейера иовторяется, и конвейер передает собранную форму на следуюииш агрегат (на фиг. не показан).
Предмет изобретения
Шагающий конвейер для транспортир ования и сборки изделий, например литейных форм, содержащий подвижную и неподвижные рамы, привод для перемещения подвижной рамы и механизм подъема и опускания ее, отличающийся тем, что, с целью непосредственной выдачи и приема изделий с разгрузочных или загрузочных конвейеров, расположенных под углом к оси щагающего конвейера, иодвиж-ная и неподвижные рамы выполнены в виде балок со стойками, между которыми имеются свободные пространства для входа разгрузочных илп загрузочных конвейеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| Шагающий конвейер БНЧ-2 | 1982 |
|
SU1090638A1 |
| Шагающий конвейер | 1980 |
|
SU905167A1 |
| Шагающий конвейер для перемещения компонентов моторных транспортных средств вдоль сборочной линии | 1982 |
|
SU1170964A3 |
| Шаговый конвейер | 1982 |
|
SU1082712A1 |
| Шагающий конвейер | 1977 |
|
SU716920A1 |
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Устройство для транспортирования изделий | 1987 |
|
SU1470628A1 |
| Шагающий конвейер | 1986 |
|
SU1452755A1 |
| Шагающий конвейер | 1983 |
|
SU1094816A1 |