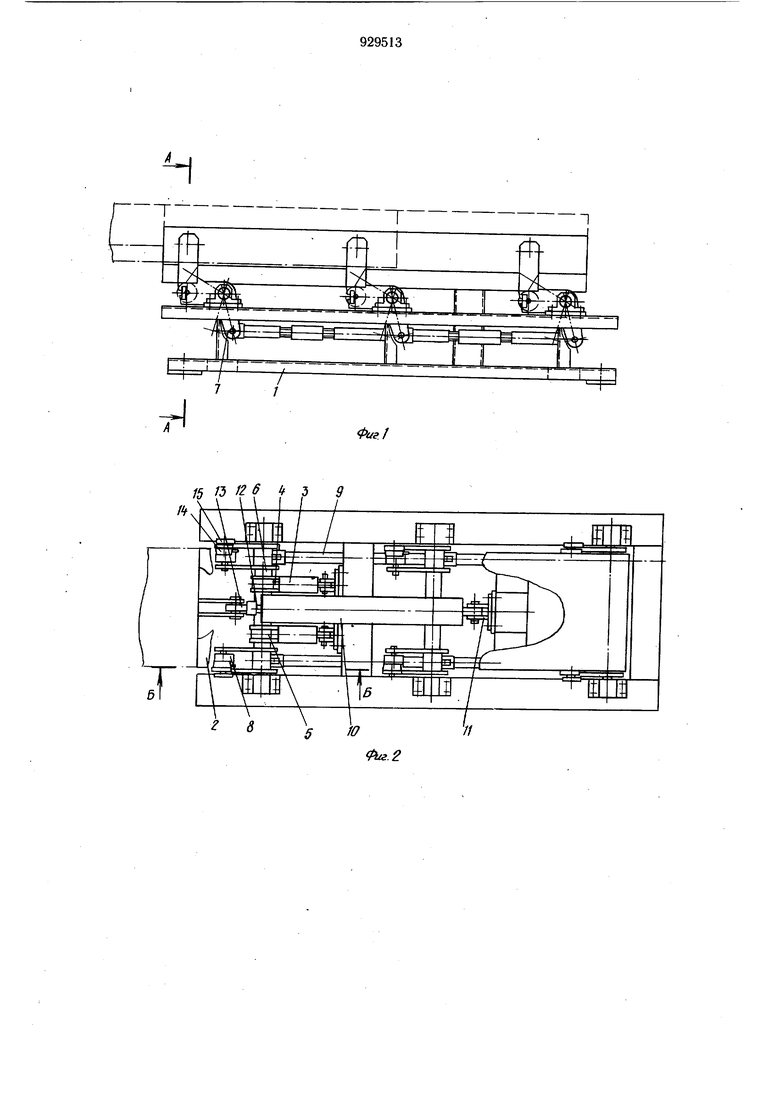
(54) ШАГАЮЩИЙ КОНВЕЙЕР-ПЕРЕГРУЖАТЕЛЬ Изобретение относится к промышленному транспорту и может быть использовано для загрузки и разгрузки различных транспортных средств, а также для перекладки изделий с одной технологической позиции на другую. Известен шагаюший конвейер, работающий в комплексе с автопогрузчиком и элеватором для транспортирования штучных грузов. Указанный шагающий конвейер загружается с помошью автопогрузчика. Снятие груза с конвейера производится элеватором с последующей передачей на ленточный конвейер 1. Наиболее близким техническим решением к изобретению является шагающий конвейер-перегружатель, содержащий неподвижную раму и подвижную раму, связанную с механизмом подъема, имеющим двуплечие рычаги, и механизмом перемещения. Кроме транспортировки изделий конвейер выполняет задачу по перестановке их на следующую технологическую позицию 2. Однако шагающий конвейер не может быть применен для перекладки изделий с одного транспортного средства на другое или для перекладки с одной технологической позиции на другую в системе автоматических линий в стесненных производственных условиях, когда длина подвижной рамы может быть менее трех шагов. Рама такой длины при съеме изделий с какого-либо транспортного средства опрокидывается, так как масса выдвинутой за опорные ролики части подвижной рамы и масса снимаемого изделия превышает массу рамы, приходящуюся на опорные ролики, что и приводит к опрокидыванию рамы. Цель изобретения - повышение надежности в работе конвейера. Для достижения поставленной цели шагающий конвейер-перегружатель, состоящий из неподвижной и подвижной рам, механизмов подъема и перемещения подвижной рамы, снабжен механизмом удержания подвижной рамы, состоящим из консольных роликов, установленных на кронщтейнах, которые закреплены на двуплечих угловых рычагах механизма подъема так, что в верхнем положении подвижной рамы они катятся по верхней плоскости полки продольной балки рамы, при опускании подвижной рамы они отходят от этой плоскости. Такое конструктивное решение даст возможность предотвратить опрокидывание подвижной рамы при ее подъеме, когда она снимает переносимое изделие с неподвижных опор. На фиг. 1 изображен шагающий конвейер-перегружатель, фронтальная проекция; на фиг. 2 - то же, вид в пл-ане;на фиг. 3 разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 2. Шагаюш,ий конвейер-перегружатель состоит из неподвижной рамы 1, на которой установлен механизм подъема подвижной рамы 2, состоящий из силовых цилиндров 3, штоки 4 которых посредством кривошипов 5 соединены с валами 6. На валах жестко закреплены двуплечие угловые рычаги 7, несушие опорные ролики 8. Угловые рычаги соединены между собой шарнирно тягами 9. По опорным роликам 8 перемещается подвижная рама 2. Механизм перемещения подвижной рамы 2 содержит силовой цилиндр 10, установленный на проушине 11. Шток 12 цилиндра 10 соединен шарнирно с подвижной рамой 2 посредством вилки 13. Механизм удержания подвижной рамы состоит из консольных роликов 14, установленных на кронштейнах 15. Кронштейны с роликами закреплены на двуплечих рычагах 7 механизма подъема подвижной рамы 2. Рама 2 имеет продольные балки 16, с верхней плоскостью 17 которых взаимодействует поверхность 18 катания ролика 14. Шагающий конвейер-перегружатель работает следующим образом. Подвижная рама 2 находится в исходном положении, при котором ее опорная поверхность расположена ниже опорной поверхности неподвижной рамы 1. Вначале включается силовой цилиндр 10 механизма перемещения подвижной рамы 2 и подвижная рама совершает ход, заходя под изделия, расположенные на неподвижной опоре. Затем включаются силовые цилиндры 3 механизма подъема, поворачивая через кривошипы 5 и авлы.б угловые рычаги 7, и поднимают подвижную раму 2. При этом изделие снимается с неподвижной опоры. Последующим включением цилиндра 10 подвижной раме сообщается горизонтальное перемещение. Затем рама опускается в исходное положение. При подъеме подвижной рамы вместе с угловыми рычагами поворачиваются и консольные ролики 14 механизма удержания подвижной рамы, вследствие чего зазор между поверхностью 18 катания роликов 14 и верхней плоскостью 17 продольной балки 16 подвижной рамы 2 уменьщается. В верхнем положений рамы 2 поверхность 18 катания ролика 14 касается плоскости 17, препятствуя таким образом ее опрокидыванию. Применение таких шагающих конвейеров перегружателей позволяет производить операции по перегрузке в стесненных условиях, а также позволяет их использовать в поточных автоматических линиях и передавать детали значительной массы. Формула изобретения Шагающий конвейер-перегружатель, содержащий неподвижную раму и подвижную раму, связанную с механизмом подъема, имеющим двуплечие рычаги, и механизмом перемещения, отличающийся тем, что, с целью повышения надежности его в работе, он снабжен роликами, консольно установленными посредством кронщтейнов на двуплечих рычагах механизма подъема с возможностью взаимодействия с подвижной рамой. Источники информации, принятые во внимание при экспертизе 1.Опыт применения шагающих конвейеров в СССР и за рубежом. Обзорная информация, вып. 1, М., 1979, с. 9. 2.Вейсман В. Ф. Шагающие конвейеры. М., «Машиностроение, 1976, с. 93-94 (прототип).
н
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки штучных грузов | 1979 |
|
SU874501A1 |
| Шагающий конвейер | 1977 |
|
SU716920A1 |
| Шагающий конвейер | 1983 |
|
SU1094816A1 |
| Конвейер-перегружатель | 1979 |
|
SU785522A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU201219A1 |
| Шагающий конвейер | 1980 |
|
SU905167A1 |
| Устройство для подачи профильного проката в пресс-ножницы | 1982 |
|
SU1038116A1 |
| Шагающий конвейер | 1982 |
|
SU1022894A1 |
| Установка для мойки и сушки тары | 1976 |
|
SU730390A1 |
| Шагающий конвейер | 1978 |
|
SU848433A1 |

15 Р f f « 3 9
