(54) ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР

| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1983 |
|
SU1097531A1 |
| Тележечный конвейер | 1980 |
|
SU981136A1 |
| Горизонтально-замкнутый тележечныйКОНВЕйЕР | 1979 |
|
SU821336A1 |
| Горизонтально-замкнутый тележечный конвейер | 1980 |
|
SU977306A1 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1364565A1 |
| Цепной тележечный конвейер | 1977 |
|
SU745812A1 |
| Вертикально-замкнутый тележечный конвейер | 1987 |
|
SU1528699A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА И ВЫВОДА ГРУЗОВЫХ ТЕЛЕЖЕК | 1973 |
|
SU398477A1 |
| Тележечный конвейер | 1980 |
|
SU918198A1 |
| Тележечный конвейер | 1978 |
|
SU732181A1 |
Изобретение относится к подъемнотранспортному машиностроению, в частности к пульсирующим тележечным конвейерам для перемещения преимущественно транспортных средств.
Известны тележечные конвейеры для перемещения транспортных средств, включающие ряд связанных между собой тележек, каждая из которых имеет механизм нодъема изделий, выполненный в виде
шарнирно-закрепленного в корпусе тележки поворотного рычаги с грузонесущей платформой, и привод перемещения тележек.
С цепью упрощения конструкции и повышения надежности работы конвейера тележки снабжены копирами, соединенныг.и) между собой с возможностью возвратнопоступательного перемещения и взаимодействия их с поворотными рычагами, при этом первая и последняя тележки снажены фиксирующими механизмами. Кроме того, фиксирующий механизм выполнен в виде подпружиненных двуплечих рычагов и упоров, при этом рычаги щарнирно уста-
новлены на корпусе тележки о воамош ностью взаимодействия одним плечом с закрепленным Р копирах кулачком, а другим - с упором, смонтирсшаниым ца раме.
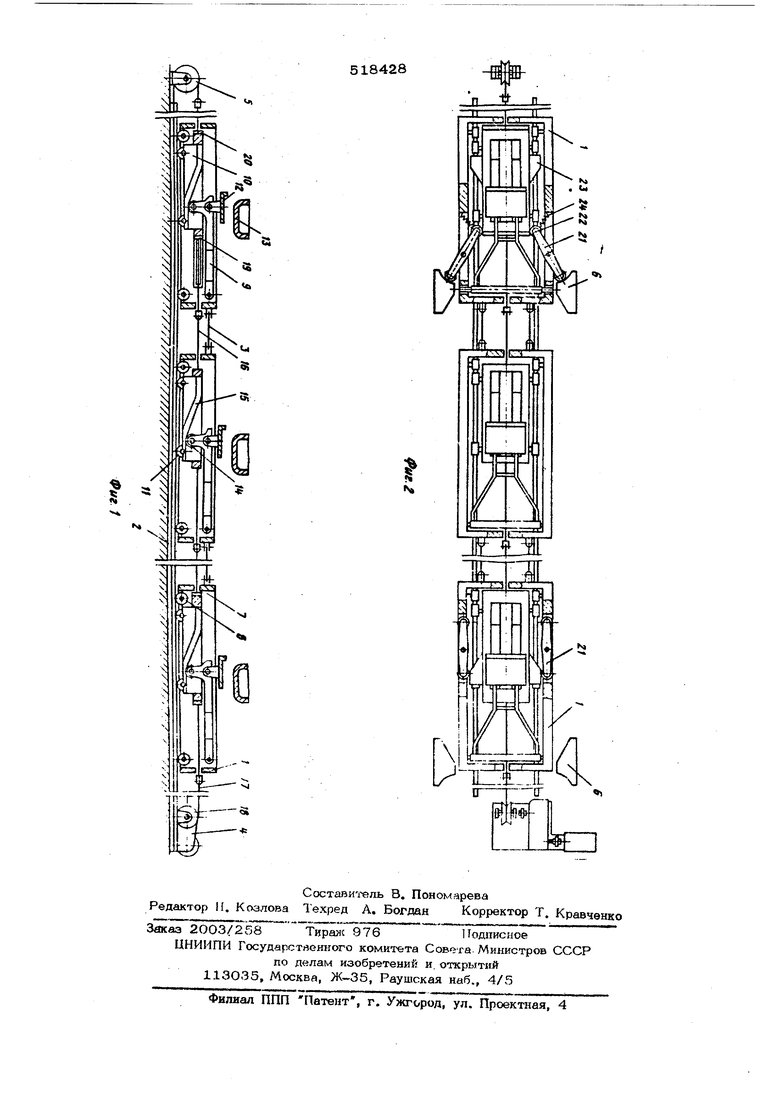
На фиг, 1 изображен тележечный конч вейер, общий вид; на фиг. 2 - то же, вид в плане.
Предлагаемый конвейер содержит ряд тележек 1, расположенных на рельсовом пути 2 и связанных между собой жесткими тяговыми элементами 3, привод перемещения тележек 4, натяжной блок 5 и неподвижные упоры 6, расположенные на основании конвейера (на чертеже не показано),
Тележка имеет корпус 7 с четырьмя неприводными колесами 8, на котсфом шарнирно закреплен поворотный рычаг 9, а также копир 10, имеющий возможность поступательного перемещения относительно корпуса тележки на колесах 11. На свободном конце поворотного рычага щар- йирно закреплена грузоподъемная площадк 12, взаимодействующая с перемещаемым
изделием 13, а также ролики 14, взаимодействующие с профильной поверхностью
15копира. Копиры всех тележек связаны между собой тяговыми элементами
16регулируемой длины. Копиры концевых тележек связаны с тянущей станцией гибким тяговым элементом 17, охватывающим барабан 18 привода пере 1ещения тележек 4 и натяжной блок 5. На -торцах копиров расположены упоры 19, 2О, взаимодействующие с корпусами тележек при крайних положениях копиров. На первой
н последней тележках расположены к.еханизмы фиксации положения тележек, состоящие из щарнирно закрепленных на корпусе тележки двуплечих рычагов 21 с роликами 22 на концах. Двуплечие рычаги 21 взаимодействуют одним концом с неподвижными упорами 6, а другим - с боковыми кулачками 23, закрепленными на боковых поверхностях копиров 10. Пружинами 24 двуплечие рычаги 21 удерживаются в выдвииугом положении.
Конвейер работает следующим образом.
Исходным положением тележек является левое положение, изображенное на фиг. 1 При этом двуплечие рычаг и 21 левой концевой тележкй 1 выдвинуты за габариты тележки и взаимодействуют с неподвижны- ми упорами 6, фиксируя тележки от перемещения вперед. Копиры 1О смещены относительно корпусов 7 тележек в крайнее левое положение, а поворотные рычаги 9 опущены.
При включении привода 4 перемещения тележек на движение вперед тя1Ч)вое уси-. лие через гибкий тяговый элемент 17 и тяговые элементы 16 передается на копиры, и последние начинают перепутаться вправо, воздействуя профильными isoBepxностями 15 на ролики 14 поворотных рычаго Под действием давления профи/гьной поверхности 15 копиров на ролики поворотных рычагов последние поворач1гваются и поднимают грузоподъемные площадки 12с расположенным на них изделием 13, Во время подъема изделий горизонта;п ные составляющие сил давления про()ильиьгх поверхностей 15 на ролики 14передаг)тсячерез . тяговые элементы 3 на корпус тележки и через двуплечие рычаги 21 - на неподвижные упоры 6. Тележки конвейера при этом остаются неподвижными. При дальпейщем перемещении копиров вправо ролики 14 поворотных рычагов 9 выходят на горизонтальные участки профильных поверхностей копиров, и подъем изделий прекращается. Одновре- М( боковые кулачки 23 копира крайней левой тележки входят в соприкосновение с роликами 22 двуплечих рычагов 21, которые при дальнейшем перемешр нии копира
вперед поворачивают их вокруг оси по часовой стрелке5 преодолевая сопротивление ппужин 24, и выводят из зацепления с неподвиж 1ыми упорами 6. При этом боковые кулачки 23 копира правой тележки выходят из взаимодействия с двуплечими рычагами 21, и последние под действием пружин 24 возврат шотся в выдвинутое положение, после чего конвейер останавливается, например, от путевого выключателя.
При включении привода 4 перемещения тележек, на обратный ход копнпы 10 тележек 1 под воздействие,. тягового элемента 17 и тяговь1х э.. ..ле.гтов 16 начиаают перемещаться назад от1;;--;тб;1ьно корпусов 7 тележек. При это.; поворотные рычаги 9, взаимодействуя роликами 14с профильными поверхностями 15 копиров, опускаются в нижнее положение, И грузоподъемные площадки выходят из взаимодействия с перемещаемыми изделиями, оставляя их в новой позиции на основании конвейера. Одновременно боковые кулачки 23 копира правой тележки входят в соприкосновение с роликами 22 двуплечих рычагов 21, при дальнейшем перемещении назад утапливают наружные концы двуплечих рычагов 21, преодолевая сопротивление пружин 24 и выводят рычаги из зацепления с передними неподвижными упорами 6. Одноврег.1енно боковые кулачки 23 копира левой тележки выходят из взaимoдe icтвия с двуплечими рычагами 21, и последние под действием пружин 24 поворачиваются ивыходятсво- ими KOjihaMH за габариты тележки. Продолжая движение назад, копиры упорами 2О воздействуют на корпуса тележек и начинают перемещать их в исходное положение.
Порядок взакмодействия двуплечих рычагов 21 задней тележки с задними неподвижными упорами в конце обратног-о хода аналоги 1ен порядку взаимодействия двуплечих рычагов передней тележки с передними неподвижными упорами в конце рабочего хода. Остановка конвейера в исходном положении может быть осуществлена, например, при помощи путевого вык;почателя, псхзле чего конвейер готов к повторению цикла.
Формула изобретения
изделий, выполненный в виде шарнирно закрепле1щого в корпусе тележки поворот ного рычага с грузонесущей платформой, и привод перемещения тележек, отличающийся тем, что, с целью упрощения конструкции и повышения надежности работы конвейера, тележки снабжены копирами, соединенными между собой с возможностью возвратно-поступательного перемещения и взаимодействия их с поворотными рычагами, при этом первая и пос-
ледняя тележки снабжены фнксвруюшимн механизмами,
518428
ПV n
,
X
м N
Oiai
i« 1-тп-Г
/
Ь т±:Г:
N
ilifr
