к
w
i-j
. .
ттт- х ,сс
,-.-TlVA
.
..
Изобретение относится к конвейерному транспорту предназначенному для меж- онеранионной транспортировки деталей в производстве, оснащенном промышленными роботами, функционпрующими в автоматических линиях.
Цель изобретения снижение энергетических затрат.
На фиг. 1 изображен предложенный конвейер, общий вид; на фиг. 2 узел I на фи|-. 1; па фиг. 3 разрез .Л--А на фиг. 1; на фиг. 4 - разрез Б Б на фи)-. 1.
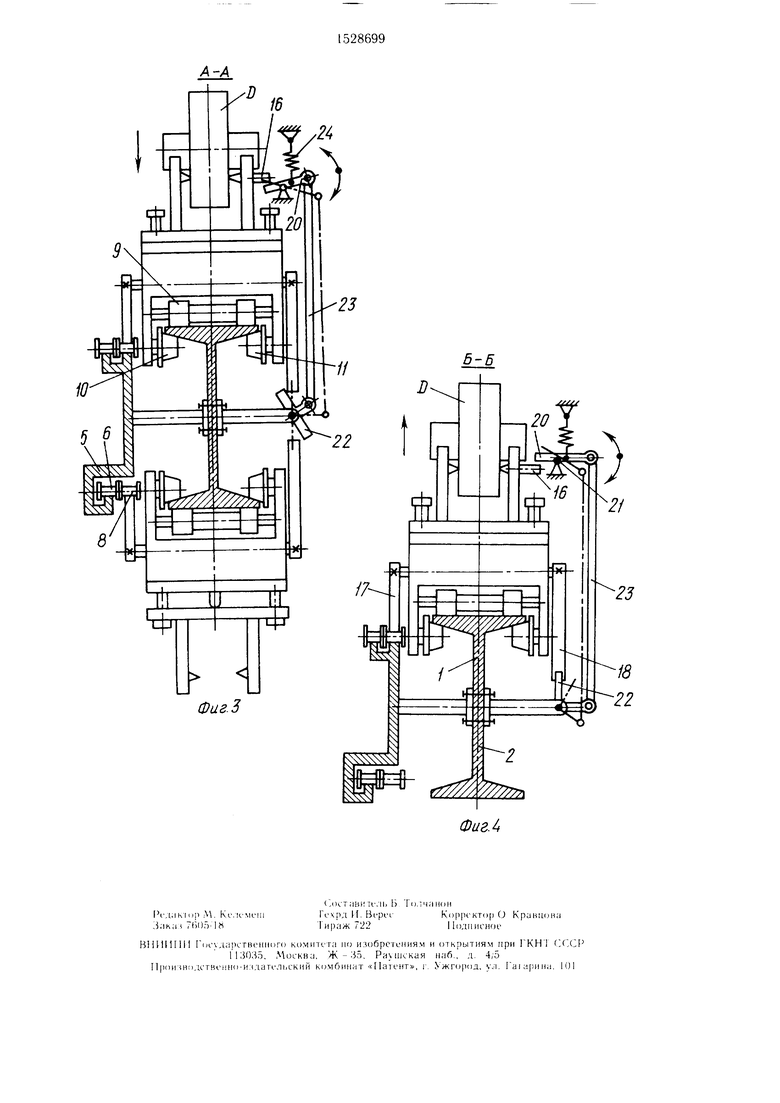
Конвейер состоит из опорной направляющей в виде двутаврового монорельса, образующей соответственно рабочий и .холостой прямолинейные участки I, 2 и связывающие их новоротные участки 3 и 4. Направляющая 5 служит для опоры дву.хрядной тяго вой цепи с одним рядом 6, натянутым на при водную звездочку 7, и другим рядом 8 для привода тележек. На направляющих 1 и 2 на роликах 9, 10 и 11 установлены указанные тележки, каждая из которы.х состоит пз ()узонесущей платформы 12 для разме1пе- ния груза D, которая установлена с воз.мож- ностью вертпкально1-о перемещения (фиг. 2) относительно основания 13 тележки, с которым платформа связана пальцамг 14 и от- носите.1ьпо которого подпружинена пружиной 15. Платформа 12 имеет боковой упор 16. а па ocHoiiannn Г) па оси (не указана) юворога жесткс; закреплепы -образно расположенные (фиг. 1, 3 и 4) плечи дву- 1лече1 о рычага тележки. Нлечо 17 спеп.че- ния с тяговой цепью выполнено с профиль- пьгм выступом для взаи.модействия с рядом 8 тяговой цепи, а управляющее плечо 18 служит для взаимодействия со стопорами. Нле- чи 17 и 18 закреплены на оси попорота так, что (x.iar аются по обои.м бокам основания 13 тележки. Нлечо 17 имеет выступ п подпружинено пружп11(Н1 19 д.чя взаимодей ствия с рядом 8 тяговой пепи
(о L TopoHf, расположения упоров И тележек на корпусе конвейера усгинов.чепы поворотные двуплечие коромыс.та 20, рас 1оло- женпые па ocii 21, обращенные к упорам 16 плечи которых раепо, 1ожены с возможностью взаимодействия с ними. Нри этом другие плечи коромысел 20, расположепны.х над стопорами 22, один из которы.х имеет в зоне участка Н Т-образную форму, а другой в зоне участка 3 Г-образную форму, 1парнирно связаны с помоп1ью ТЯ1 23 с стопорами, причем указаппые плечи коромысел 20 связаны с пружинами 24 растяжения, обес- |ечпваюпи1ми поворот коро.мысс, 20 в положение, при котором стопоры 22 взаимодействуют с плечами 18 тележек, закрывая их ход. Коромыс.та 20 яв,1яются мехаппзмами управления стопорами 22. Тележки оснащены задними упорами 25.
0
Конвейер работает следующим образом.
Привод (не показан), вращая звездочку 7, передает движение двум рядам 6 и 8 приводной цепи. При этом при отсутствии деталей D на грузонесущей тележке на участке 4 движение тележек застопорено. Это происходит в результате того, что пружина 24 удерживает коромысло 20 в таком положении, при котором поворотный Т-образный стопор 22 своими плечами воздействует на нижние концы плеч 18 двуплечих рычагов тележек, находящихся на рабочем и холостом участка.х 1 и 2 у поворотного участка 4 (фиг. 3). Причем при наличии у поворотного участка 3 тележки с деталью D ее уход на холостую ветвь 2 исключен другим стопором 22, который благодаря пружине 24 коромысла 20 удерживается в положении, при котором стопор 22 взаимодействует с плечом
18двуплечего рыча1 а тележки, растягивающим пружину 19 и выводящим плечо 17 двуплечего рычага тележки из зацепления его с рядом 8 приводной цепи. При этом все другие тележки, на.ходящиеся между стоя- П1,ими на рабочей и холостой ветвях 1 и 2, также стоят так как плечи 1-8 двуплечих ры5 ча1 ов этих тележек взаимодействуют с упорами 25 остановивп1ихся те.тежек.
Приведение тележек в движение на конвейере возможно только при систематическом снятии деталей с них на участке 3 или при установке на тележки, находящиеся на участке 4, новых деталей. Это позволяет ор- гапизовать работу конвейера в наиболее рациональном режи.ме, напрапример в автомагических линиях, коГлТа роботы на участках 3 и 4 работают синхронно (наиболее эконо- мичн1;1Й режим). Это происходит так. Нри ус- гап() детали D на подвижную платфор.му 12 те.чежки от веса детали пружина 15 сжимается и п.чатформа 12 на пальцах 14 опускается к основанию 13, выбирая зазор h. При опускании платформы 12 ее упор 16, будучи расположенным над свободным плечом коромысла 20, воздействует на него, поворачивая его на оси 21. Нружина 24 сжимается, а тя1 а 23 поворачивает Т-образный 5 с roiHjp 22, освобождая от своего воздействия плечи 18 двуплечих рычагов те.тежек па рабочей и холостой ветвях. Плечи 17 двуплечих рычагов тележек под действием пружин
19входят в зацепление с рядом 8 движу- П1ейся цепи. В этот момент времени загруженная деталью тележка уходит в направлении участка 3 разгрузки, а пустая тележка, минуя поворотный участок 4, переходит с холостого участка 2 на рабочий участок 1, занимая свобод1()о место. Одновременно с эти.м процессом загрузки на участке 4 другим роботом производится разгрузка крайней тележки на участке 3.
0
5
0
0
5
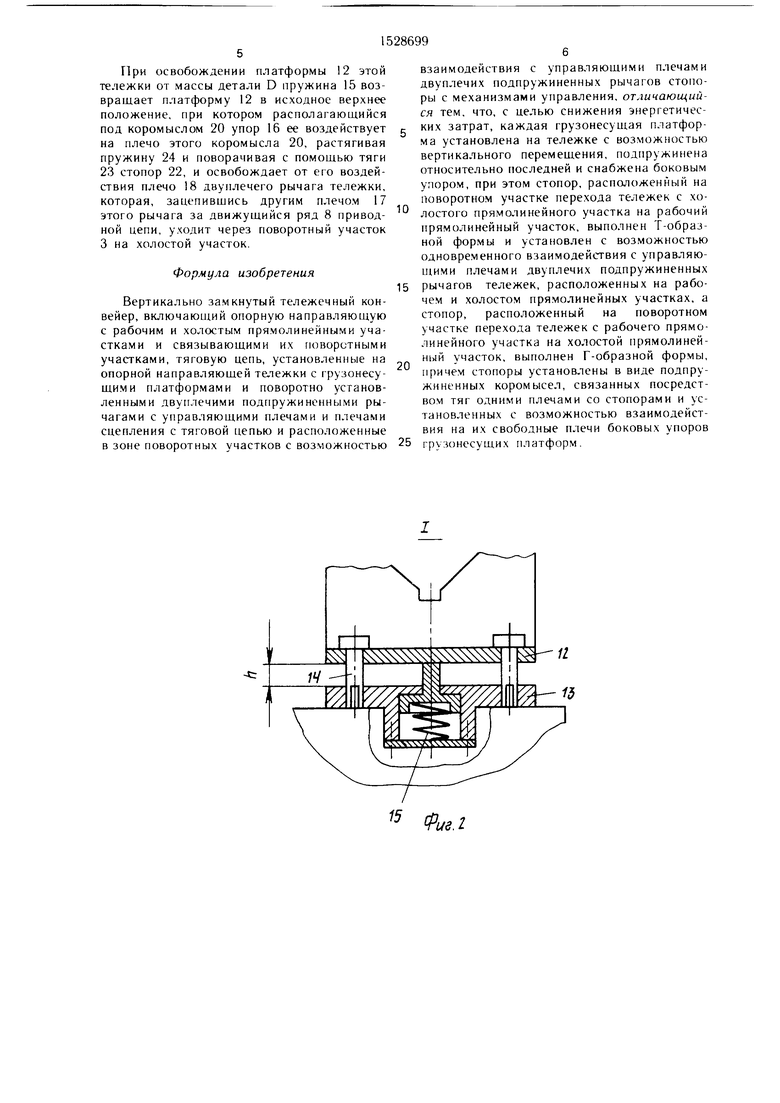
При освобождении платформы 12 этой тележки от массы детали D пружина 15 возвращает платформу 12 в исходное верхнее положение, при котором располагающийся под коромыслом 20 упор 16 ее воздействует на плечо этого коромысла 20, растягивая пружину 24 и поворачивая с помощью тяги 23 стопор 22, и освобождает от его воздействия плечо 18 двуплечего рычага тележки, которая, зацепивщись другим плечом 17 этого рычага за движущийся ряд 8 приводной цепи, уходит через поворотный участок 3 на холостой участок.
Формула изобретения
Вертикально замкнутый тележечный конвейер, включающий опорную направляющую с рабочим и холостым прямолинейными участками и связывающими их поворотными участками, тяговую цепь, установленные на опорной направляющей тележки с грузонесу- щими платформами и поворотно установленными двуплечими подпружиненными рычагами с управляющими плечами и плечами сцепления с тяговой цепью и расположенные в зоне поворотных участков с возможностью
0
5
0
5
взаимодействия с управляющими плечами двуплечих подпружиненных рычагов стопоры с механизмами управления, отличающийся тем, что, с целью снижения энергетических затрат, каждая грузонесущая платформа установлена на тележке с возможностью вертикального перемещения, подпружинена относительно последней и снабжена боковым упором, при этом стопор, расположенный на поворотном участке перехода тележек с холостого прямолинейного участка на рабочий прямолинейный участок, выполнен Т-образной формы и установлен с возможностью одновременного взаимодействия с управляющими плечами двуплечих подпружиненных рычагов тележек, расположенных на рабочем и холостом прямолинейных участках, а стопор, расположенный на поворотном участке перехода тележек с рабочего прямолинейного участка на холостой прямолинейный участок, выполнен Г-образной формы, причем стопоры установлены в виде подпружиненных коромысел, связанных посредством тяг одними плечами со стопорами и установленных с возможностью взаимодействия на их свободные плечи боковых упоров грузонесущих платформ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикально замкнутый тележечный конвейер | 1985 |
|
SU1244043A1 |
| ВЕРТИКАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1972 |
|
SU345068A1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| Конвейер | 1982 |
|
SU1105401A1 |
| Тележечный конвейер | 1974 |
|
SU518428A1 |
| ПОДВЕСНОЙ ТОЛКАЮЩИЙ КОНВЕЙЕР | 1971 |
|
SU295722A1 |
| Устройство для передачи грузов | 1989 |
|
SU1641744A1 |
| Тележка конвейера | 1974 |
|
SU516592A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| Тележка подвесного толкающего конвейера | 1978 |
|
SU787290A1 |
Изобретение относится к конвейерному транспорту и позволяет снизить энергетические затраты. Конвейер включает опорную направляющую с рабочим и холостым прямолинейными участками (У) 1, 2 и связывающими их поворотными У 3, 4, тяговую цепь, установленные на опорной направляющей тележки с грузонесущими платформами (ГП) 12 и стопоры с механизмами управления. На тележках поворотно установлены двуплечие подпружиненные рычаги с управляющими плечами (П) 18 и П 17 сцепления с тяговой цепью. Стопоры расположены в зоне У 3, 4 с возможностью взаимодействия с П 18. При этом каждая ГП 12 установлена на тележке с возможностью вертикального перемещения, подпружинена относительно последней и снабжена боковым упором. Стопор, расположенный на У 4 перехода тележек с У 2 на У 1, выполнен Т-образной формы и взаимодействует с П 17 тележек, расположенных на У 2 и У 1. Стопор, расположенный на У 3, выполнен Г-образной формы. Стопоры установлены поворотно, а механизмы их управления выполнены в виде коромысел, связанных одними плечами через тяги со стопорами. На другие плечи коромысел воздействуют боковые упоры ГП 12. При опускании детали D на ГП 12 в зоне У 4 последняя опускается и боковым упором, воздействуя на коромысло, выводит стопор Т-образной формы из взаимодействия с П 18 тележек, расположенных на У 2 и У 1. Тележка, расположенная на У 1, перемещается к стопору, установленному в зоне У 3, а тележка, расположеная на У 2, перемещается на У 1 и останавливается стопором. Тележка с деталью D, дойдя до стопора в зоне У 3, упирается в последний П 18 и разъединяется П 17 с цепью. После съема детали D боковой упор воздействует на коромысло и отклоняет Г-образный стопор, выводя его из взаимодействия с П 18. Последний поворачивается, П 17 входит во взаимодействие с цепью и тележка перемещается с У 1 на У 2. 4 ил.
ffue.2
.24
.7
| Тележечный конвейер | 1980 |
|
SU918198A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Вертикально замкнутый тележечный конвейер | 1985 |
|
SU1244043A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
