Изобретение касается лесозаготовительных машин и может применяться в лесной промышленности на заготовке леса.
Известна лесозаготовительная машина, включающая самоходное шасси, на поворотной платформе которого установлены манипулятор со стойкой, снабженной захватами, пильный аппарат, приспособление для ориентации стойки относительно дерева и гидропривод, снабженный гидроцилиндрами поворота стойки, платформы и управления захватами.
Недостатком такой конструкции является то, что захватное устройство не может копировать положение дерева в пространстве. В результате этого при захвате дерева происходит деформация ствола и как следствие зажим пилы при пилении.
Цель изобретения - устранение деформации дерева при его захвате и срезании.
Достигается это тем, что приспособление для ориентации стойки относительно дерева выполнено в виде тактильных датчиков, установленных на верхней и нижней частях стойки, причем одна группа датчиков связана с гидроцилиндром поворота стойки, другая - с гидроцилиндрами поворота платформы, а обе группы -при помоши логического элемента И-с гН|Дро.цили1Н|Дра.ми управления захватами.
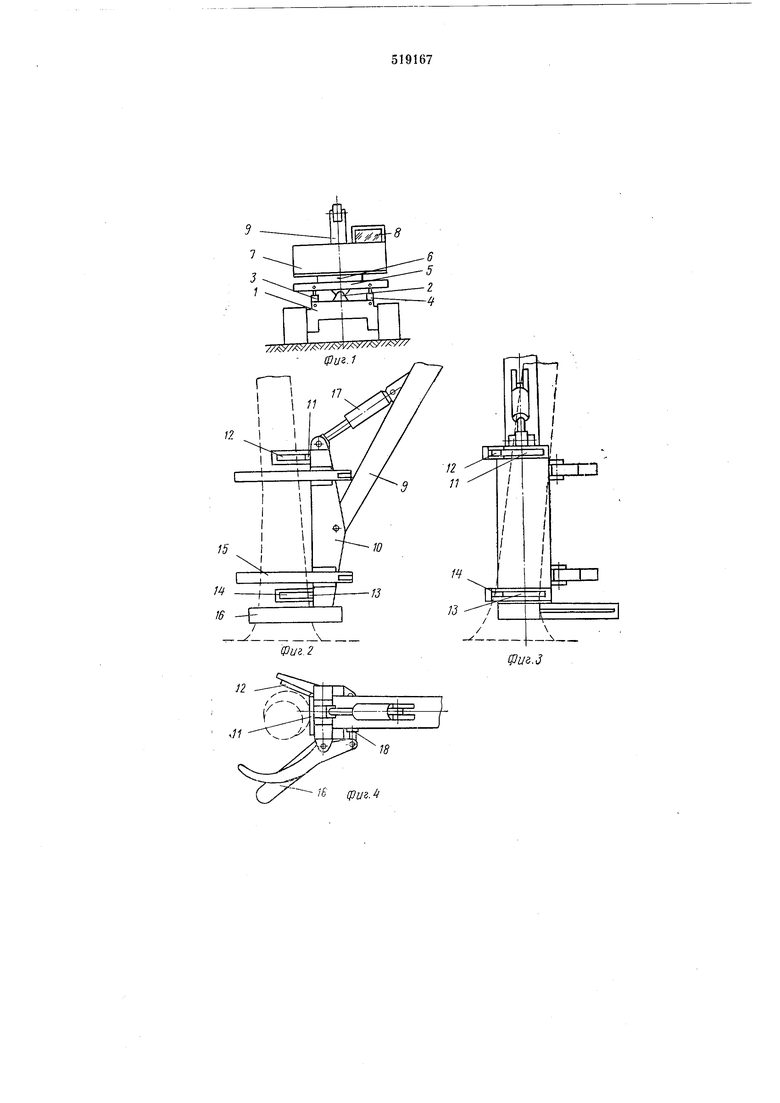
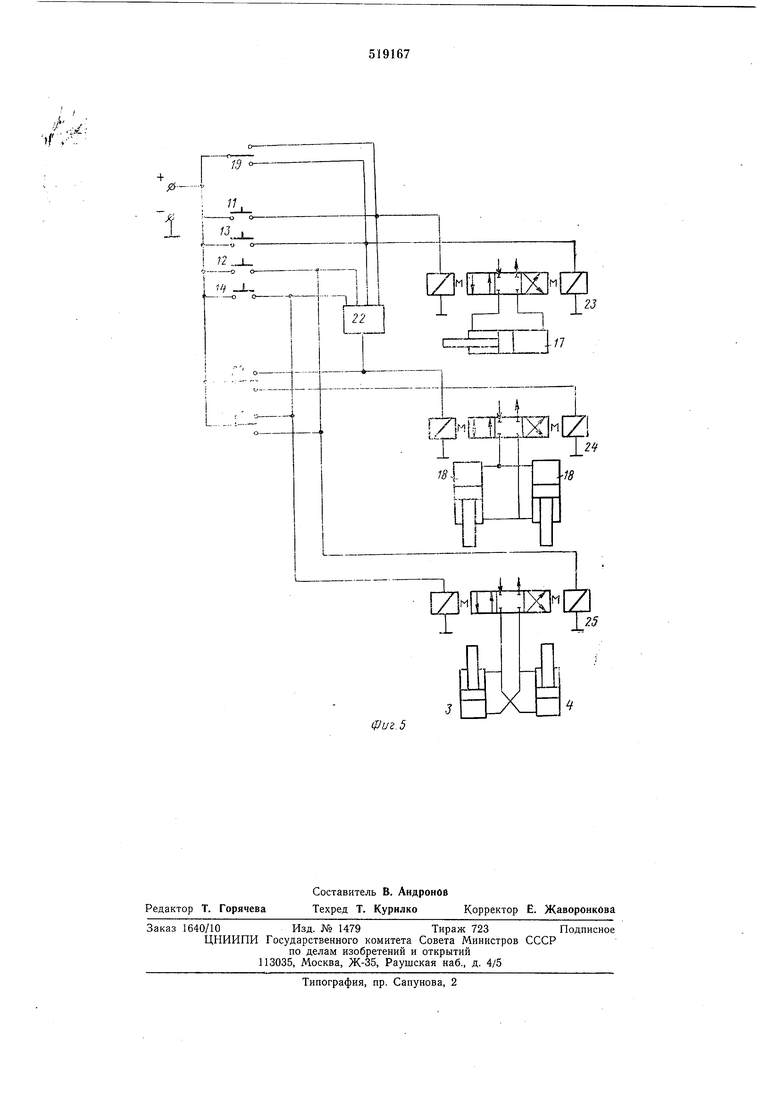
На фиг. 1 изображена лесозаготовительная машина, вид сзади; на фиг. 2 - захватно-срезаюшее устройство, вид сбоку; на фиг. 3 - то же, вид спереди; на фиг. 4 - то же, вид сверху; на фиг. 5 - электрогидравлическая схема управления захватно-срезающим устройством.
Лесозаготовительная машина состоит из самоходного шасси, на раме 1 которого посредством шарнирной опоры 2 и двух гидроцилиндров 3 и 4 установлено качаюш,ееся основание 5, на котором размещена поворотная платформа 6. На платформе 6 расположены силовая установка 7, кабина 8 и манипулятор 9. На консольном конце манипулятора 9 установлена с возможностью поворота в его плоскости стойка 10, в верхней части которой размещены
тактильные датчики 11 к 12, а в нижней части - датчики 13 и 14 для ориентации стойки относительно дерева. Кроме того, на стойке 10 шарнирно установлены рычаги 15 захватного устройства и срезающее устройство 16. Гидроцилиндр 17 служит для поворота стойки 10, а гидроцилиндры 18 - для привода рычагов 15. Схема управления включает, кроме тактильных датчиков И -14, тумблеры 19, 20 и 21 для ручного управления, логический элемент И
22, электроуправляемые золотники 23, 24 и 25 и источник электропитания, связанные друг с другом посредством проводников.
Лесозаготовительная машина при захватывании наклонно стоящего дерева работает
следующим образом.
Дерево наклонено так, как показано на фиг.
2и 3, а стойка 10 захватно-срезающего устройства подается к дереву .в любом близком к вертикальному положению. Стойка 10 касается дерева своими датчиками 13 и 14, контакты которых замыкаются, и электрический ток течет через правую обмотку золотника 23 и через левую обмотку золотника 25. При этом гидроцилиндр 17 поворачивает стойку 10 до касания дерева датчиком 11, а гидроцилиндры
3и 4 наклоняют основание 5 машины до тех пор, пока датчик 12 не коснется дерева. В этот момент левые и правые обмотки золотников 23 и 25 находятся под напряжением, плунжеры их под действием центрирующих пружин приходят в нейтральное положение и гидроцилиндры 3, 4 и 17 останавливаются. На всех входа-х логического элемента И 22 будет электрический потенциал, благодаря чему на выходе его появляется напряжение и через левую обмотку золотника 24 течет ток. Срабатывают гидроцилиндры 18, и дерево оказывается зажатым в захватном устройстве, стойка 10 будет расположена параллельно дереву, благодаря чему оно не испытывает изгибающих напряжении и срезание его происходит без сколов и зажимов срезающего органа.
Формула изобретения
Лесозаготовительная машина, включающая самоходное шасси, на поворотной платформе которого установлены манипулятор со стойкой, снабженной захватами, пильнъш аппарат,
приспособление для ориентации стойки относительно дерева и гидропривод, снабженный гидроцилиндрами поворота стойки, платформы и управления захватами, отличающаяся тем, что, с целью устранения деформации
дерева при его захвате и срезании, приспособление для ориентации стойки относительно дерева выполнено в виде тактильных датчиков, установленных на верхней и нижней частях стойки, причем одна группа датчиков связана
с гидроцилиндром поворота стойки, другая - с гидроцилиндрами поворота платформы, а обе группы при ПОМОЩИ логического элемента И - с ги№:рО|Цили1НДра.ми уяравления захватами.
/,е
id Риг.
/.
tf .-.:
.. Г
;&1
| название | год | авторы | номер документа |
|---|---|---|---|
| Лесозаготовительная машина | 1988 |
|
SU1542484A1 |
| Стрела лесозаготовительной машины | 1974 |
|
SU492254A1 |
| Лесозаготовительная машина | 1982 |
|
SU1021614A1 |
| Лесозаготовительная машина | 1975 |
|
SU533358A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2127038C1 |
| Захватно-срезающее устройство | 1977 |
|
SU865220A1 |
| Устройство управления лесозаготовительной машиной | 1990 |
|
SU1757532A1 |
| Лесозаготовительная машина | 1987 |
|
SU1442134A1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| Привод рабочих органов лесозаготовительной машины | 1989 |
|
SU1652703A2 |