1
Изобретение относится к машинострое:вию, в частности к манипуляторам
Известны механизмы качания механической руки, состоящие из корпуса, приво да и устройства линейного перемещения, шарнирно установленного между корпусом исполнительным звеном,о
Известные механизмы качания механи ческих рук не надежны в работе, поэтому |рабочая жидкость подается к приводу че(рез гибкий шланг,Цель изобретения - повышение надено IHOCTH механизма в работе.
Для этого привод жестко закреплен на корпусе и кинематически связан с валом устройства линейного перемещёнияв вьшопаенногос возможностью качагаця вокруг ос №1Х внрго вала этого привода,
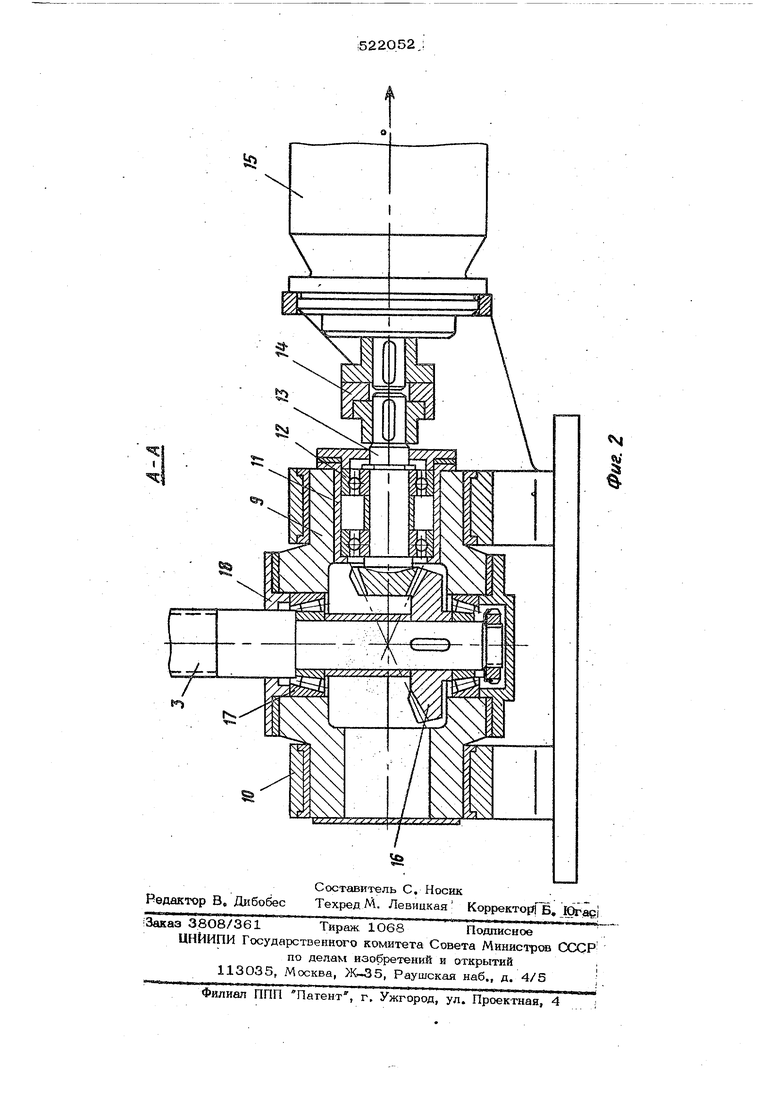
На фиг...;1 показан предлагаемый, меха« |низм, ВИДсбоку; на фиг 2 разрез А-А 1на фиг, 1.
Механизм качания содержит редуктор 1 с гидроусилителем и задающим приводом (на чертеже не показан) и шарико-винтовую пару 2. Шарико-винтовая пара 2 сос
тоят из винта 3, подъема реаьбы koTp рого выбран из условия самоторможения в ширико-вйнтовой пфе 2 после прекращения врашения винта 3. Винт 3 вращается в двух гайках 4, посредством, которых выбирается пюфт Б шар 1ко винтовой парее .Гайки 4 вмео тес корпусом закреплены в полом стакане В, Расстояние 1L ( фиг. ) необходимый ход винта « соответствует Гтребуемому т
0 лу качания исполнительного звена. Стакан 5 закреплен на оси б, установленной на нических подшипниках в корпусе 7, Кор пус 7 крепится к траверсе исполнительно гЬ звена. Для предотвращения попадания
5 пыли, стружки и грязи на винт 3 шарико винтовой пары последний закрыт йожухом8.
Корпус 9 редуктора 1 механизма ка чания установлен в подшипниках скольже- : |ния lOt прикрепленных к поворотному сто-
луробота, В корпусе 9 установлен стакан 11, JB котором на подшипниках 12 смонтирова на коническая ваЛ-шестерня 13, которая через муфту 14 соединена с выходным валом гидроусилителя 15, Коническая вал- шестерня 13 зацеплена с коническим коле8
сом 16 эакрьяленным на винте 3.Винт 3 уотан1жпен в корпусе 9 на конических ;-одишпнвкйх 17, закрепленных в корпусе 9 крышками 13.i
При вращении выходного вала гидроуси-f лнтеля 15 враше.1ие через муфту 14 передается на коническую вал-шестерню 13, которая через коническое колесо 16 пере- j дает вращение на винт 3. Шарико-винтовая паре 2 преобразует вращательное дви-1 женке выходного вала гидроусшштеля 15 в поступательное движение стакана 5с закрепленными в нем гайками 4, ято и обец спечивает качание руки. Поступательное движение гаек 4 (под действием динамиjjt&ctaai. л ста-гаческих нагрузеж руки промышлеиного робота) не может бьггь преобиразовано во вращательное движение винта 3, так jKCK угол подъема резьбы винта i из условия самоторможения.|
Гидроусшштель 15 закреплен на фланце подшипника жояьжешшо1О неподв.окно и
таким образом, псжачивслие его исключено, поэтому масло подводится к гидроусилителю 15 жесткими трубопроводами. Кроме того, шарико-«интовая пара 2 обладает свойствами самоторможения, что исключает возможность падения руки в то технологическое оборудование, с которым работает робот.
изобретения
10 ф
о р м у л а
: Механизм качая&я;. механической рукн, состоящий из корпуса, привода и устройства линейного перемещения, шарнирно ус тановленного между корпусом, и исполнительным звеном, отлнчаюшнйт с я тем, что, с целью повышения надежности, привод жестко закреплен нзкорг-усе и кинематичс ки связан с валом устройст-
ва линейного перемещения, вьшолненаого ; ос возможностью качания вокруг оси выход-4 ного вела этого привода.
Фие.1
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| УСТРОЙСТВО ДЛЯ СИСТЕМ ЗАШТОРИВАНИЯ И ВЕНТИЛЯЦИИ ТЕПЛИЦЫ | 1997 |
|
RU2130248C1 |
| Привод механической руки | 1977 |
|
SU629061A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1161370A2 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2541829C1 |
| ПРИВОД ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2339858C2 |
| Привод протеза руки | 1979 |
|
SU825064A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |