(54) МОРОЗИЛЬНЫЙ АППАРАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Морозильный аппарат | 1974 |
|
SU504054A1 |
| Морозильный плиточный аппарат | 1982 |
|
SU1057754A1 |
| Морозильный аппарат | 1982 |
|
SU1089370A1 |
| Устройство для перемещения металлических деталей | 1981 |
|
SU1003977A1 |
| Морозильный аппарат | 1980 |
|
SU981783A1 |
| Устройство кривовязюка для загрузки листового материала на каретку | 1980 |
|
SU912351A1 |
| Автомат для приварки к торцам труб элементов соединительной арматуры | 1974 |
|
SU640830A1 |
| Камера для замораживания продуктов | 1980 |
|
SU991114A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ОСАДКОВ С ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ ВЕРТИКАЛЬНЫХ МНОГОТРУБЧАТЫХ ТЕПЛООБМЕННИКОВ, НАПРИМЕР, ВЫПАРНЫХ АППАРАТОВ | 1935 |
|
SU50768A1 |
| Разгрузочное устройство плиточного морозильного аппарата | 1982 |
|
SU1133461A1 |
Изобретение относится к холодильной технике.
Известны морозильные аппараты, состояшие из набора контактных плкт с- устройств вом для последовательного подъема каждой плиты, причем подъем одной плиты вызывает подъем всех остальных плит, расположенных над ней. В этой установке последователное раскрытие плит не позволяет вести заморозку продуктов с различным временем выдержки без нарушения контакта ппит с продуктом, а для выхода механизма подъема плит в верхнем положении неибходи1л дополнительный термоизолированный объем.
Целью изобретения является обеспечение выборочной загрУЬки и разгрузки продукта |Н увеличение пблезного объема камеры, . Это достигается тем, что механизм подъема и перемещения-блок-форм снабжен поворотными вертикальными штангами с упорами, размешенными вдоль штанг по спирали, и имеет ограничитель вертикального перемещения блок- орм, связанный с поворотными штангами.
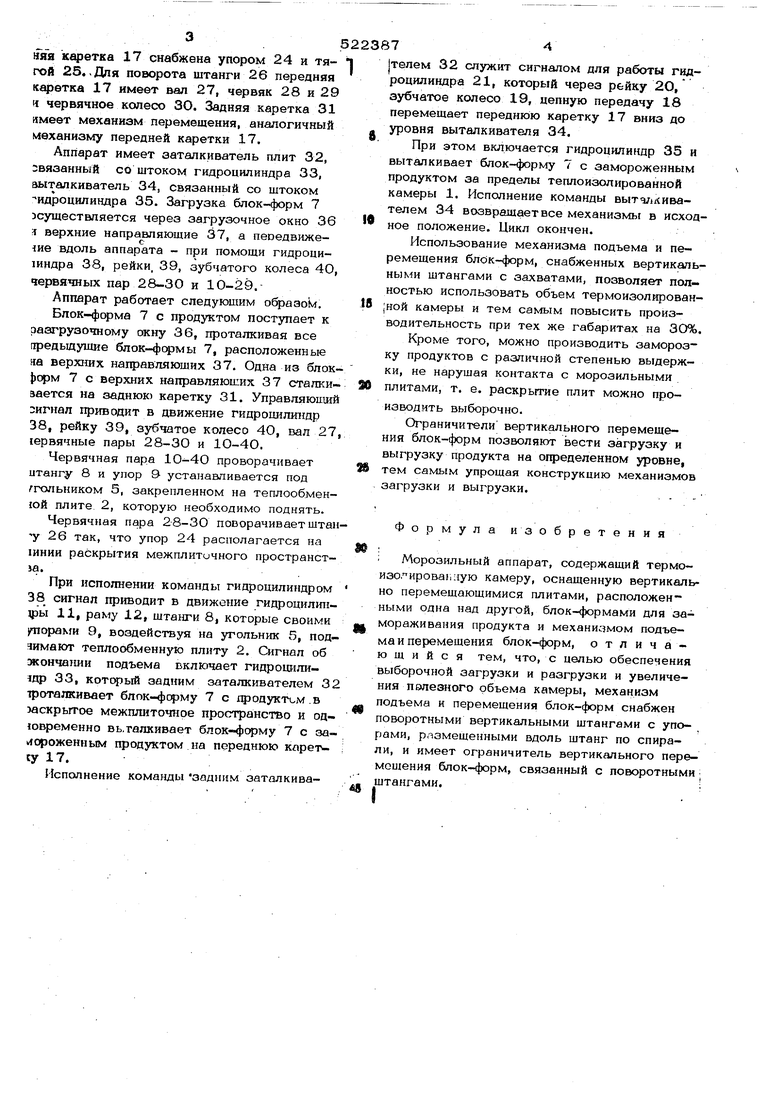
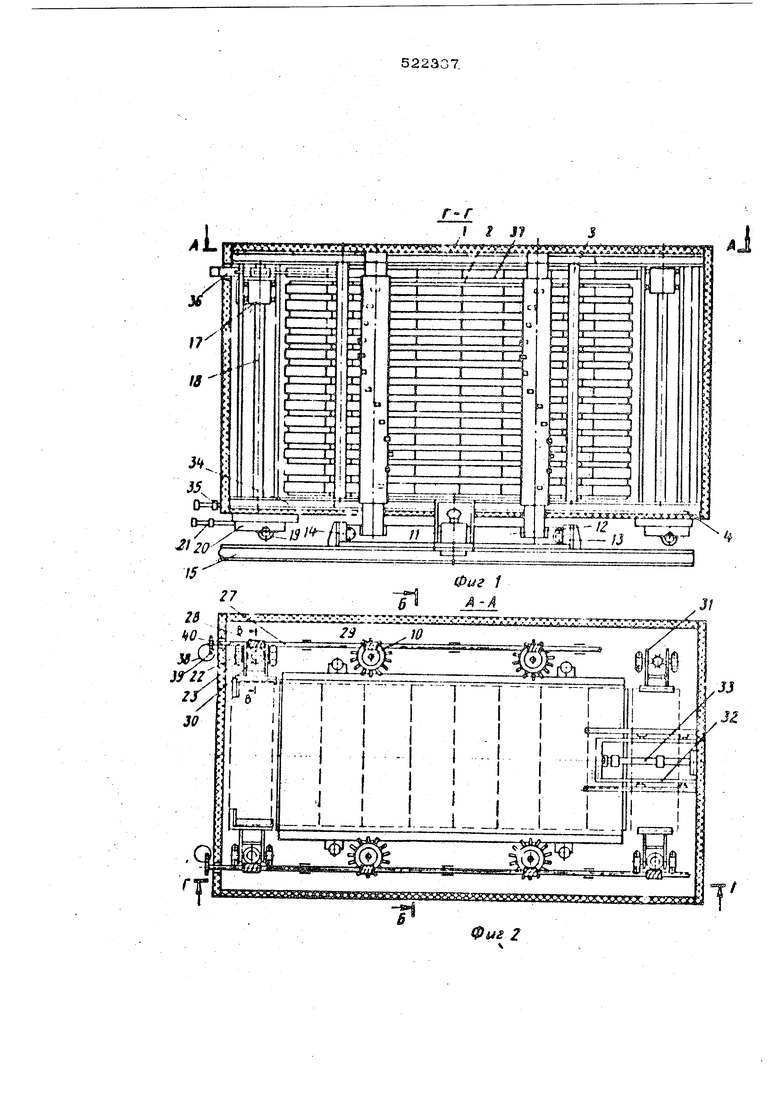
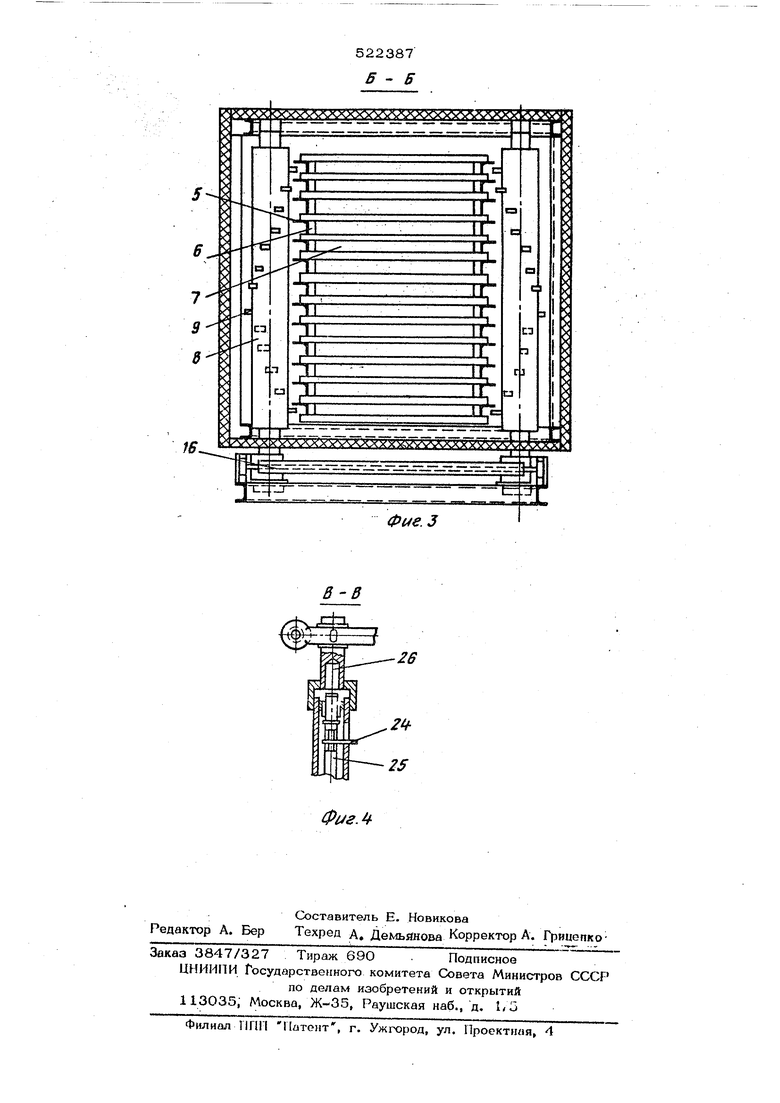
На фиг. 1 изобра) н предложенный апгшpar, фронтальная проекция; на фнг. 2 - раа рез по А-А на фиг. 1; на фиг. 3 - разрез по В-В на фиг. 2; на фиг. 4 - разрез по В-В на фиг. 2.
I Морозильный аппарат содержит теплоизо|лированну1о камеру 1, в которой размещены теплообменные пииты 2, установпенные с возможностью перемещения по направлякшим 3. Нижняя теплообмеиная плита 2 лежит на раме 4, К плитам 2 кропятся угольники 5. На угольниках 5 имеются направляющие 6 для горизонтального перемещения блок-форм 7.
На штанге 8 закреплены упоры 9. На .верхней части штанги 8 имеется червячное колесо 1О. Подъем штанг 8 осуществляется гидроцилиндрами 11, рамой 12, снабжен1НОЙ зубчатыми колесами 13, рейкой 14, закрепленной на фундаментной раме 15. Зубчатые колеса 13 жестко сидят на валу 16.
Механизм перемопгения включает переднюю :каротку 17, иепную передачу 18, зубчатое KOjioco 10, рейку 2О, гилроцилиндр 21, ролики 1..2 и нпп)авляю1Ш1е 23. Перед- 5 няя каретка 17 снабжена упором 24 и тягой 25..Для поворота штанги 26 передняя каретка 17 имеет вал 27, червяк 28 и 29 и червячное колесо ЗО. Задняя каретка 31 имеет механизм перемещения, аналогичный механизму передней каретки 17. Аппарат имеет заталкиватель плит 32, связанный со штоком гидроцилиндра 33, зыталкиватель 34, связанный со штоком идроцилиндра 35. Загрузка блок-форм 7 эсуществляется через загрузочное окно 36 верхние направляющие 37, а пеоедвиже иe вдоль аппарата - при помощи гидроци1индра 38, рейки. 39, зубчатого колеса 4О, червячных пар 28-30 и 10-29. Аппарат работает следующим офааом. Блок-ферма 7 с продуктом поступает к разгрузочному окну 36, проталкивая все иредьщушие блок-фчрмы 7, расположенные яа верхних направляющих 37. Одна из блок})фм 7 с верхних направляюших 37 сталкизается на заднюю каретку 31. Управляющий зигнал приводит в движение гидроиилиндр 38, рейку 39, зубчатое колесо 40, вал 27 шрвячные пары 28-30 и 10-40. Червячная пара 10-4О проворачивает итангу 8 и упор Э устанавливается под игольником 5, закрепленном на теплообменюй плите 2, которую необходимо поднять. Червячная пара 28-30 поворачиваетштан у 26 так, что упор 24 располагается на 1ИНИИ раскрытия межплитичного пространстla.. При исполнении команды гидроцилиндром 38 сигнал приводит в движение гидроцилинфы 11, раму 12, штанги 8, которые своими (порами 9, воздействуя на угольник 5, под нимают теплообменную плиту 2. Сигнал об жончании подъема включает гидрош ли др 33, который задним заталкивателем 3 троталкивает блок-ферму 7 с лдэодуктьм.в }аскрытое межплнточное пространство и одювременно вь.галкивает блок-форму 7 с за opoжeнным продуктом на переднюю каретсу 17. Исполнение команды задним заталкива71телем 32 служит сигналом для работы гидродилиндра 21, который через рейку 2О, зубчатое колесо 19, цепную передачу 18 перемещает переднюю каретку 17 вниз до уровня выталкивателя 34. При этом включается гидроцилиндр 35 и выталкивает блок-форму 7 с замороженным продуктом за пределы теплоизолированной камеры 1. Исполнение команды выталкивателем 34 возвращает все механизмы в исходное положение. Цикл окончен. Использование механизма подъема и перемещения блок-форм, снабженных вертикальными штангами с захватами, позволяет полностью использовать объем термоизолирован:ной камеры и тем самым повысить производительность при тех же габаритах на ЗО%. Кроме того, можно производить заморозку продуктов с различной степенью выдержки, не нарушая контакта с морозильными плитами, т. е. раскрытие плит можно производить выборочно. Ограничители вертикального перемещения блок-форм позволяют вести загрузку и выгрузку продукта на определенном уровне, тем самым упрощая конструкцию механизмов загрузки и выгрузки.. Формула изобретения Морозильный аппарат, содержащий термо- изo.иpoвalJ:Iyю камеру, оснащенную вертикально перемещающимися плитами, расположен ными одна над другой, блок-формами для замораживания продукта и механизмом подъема и перемещения блок-форм, отличающийся тем, что, с целью обеспечения выборочной загрузки и разгрузки и увеличения полезного объема камеры, механизм подъема и перемещения блок-форм снабжен поворотными вертикальными щтангами с упорами, размещенными вдоль щтанг по спирали, и имеет ограничитель вертикального перемещения блок-форм, связанный с поворотными ; щтангами.
522387
Б Б
Ф1(е.3
