(54) МОРОЗИЛЬНЫЙ АППАРАТ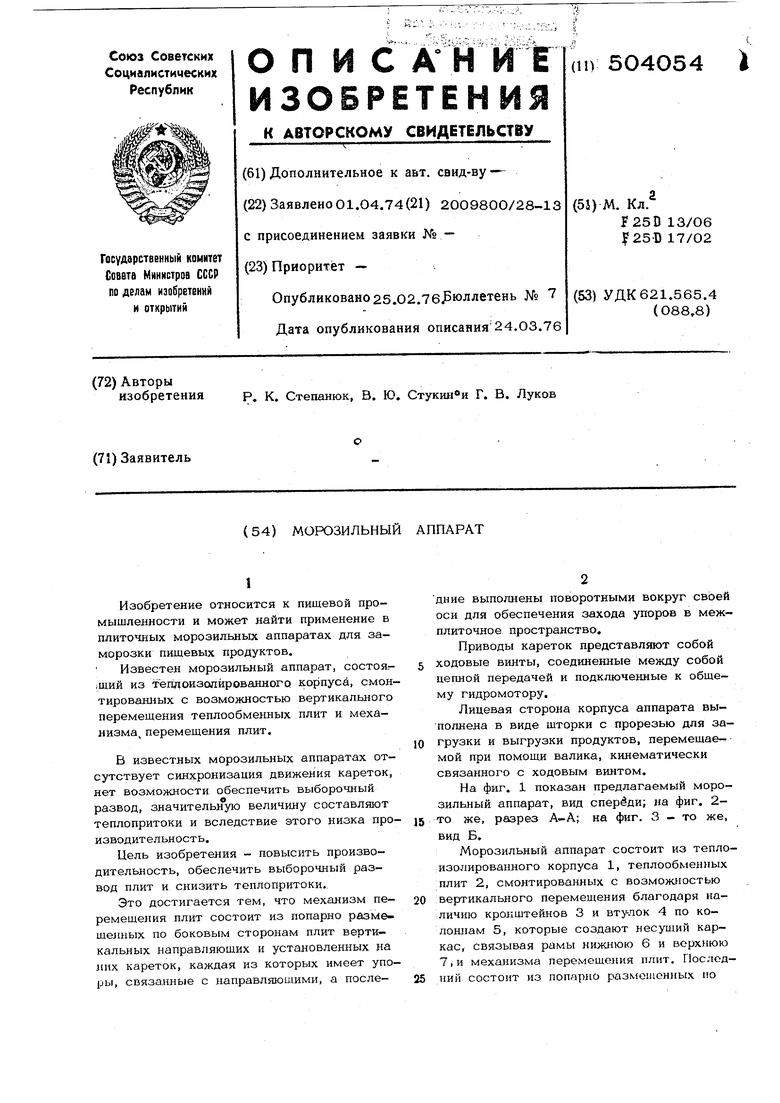

| название | год | авторы | номер документа |
|---|---|---|---|
| Морозильный плиточный аппарат | 1982 |
|
SU1057754A1 |
| Морозильный аппарат | 1978 |
|
SU748097A1 |
| Морозильный аппарат | 1981 |
|
SU1006880A1 |
| Морозильный аппарат | 1982 |
|
SU1089370A1 |
| Морозильный аппарат | 1978 |
|
SU763654A1 |
| Морозильный аппарат | 1979 |
|
SU836468A1 |
| Морозильный аппарат | 1974 |
|
SU522387A1 |
| Морозильный аппарат | 1980 |
|
SU981783A1 |
| Морозильный аппарат | 1984 |
|
SU1165859A1 |
| Морозильная секция плиточногоАппАРАТА | 1979 |
|
SU848923A1 |
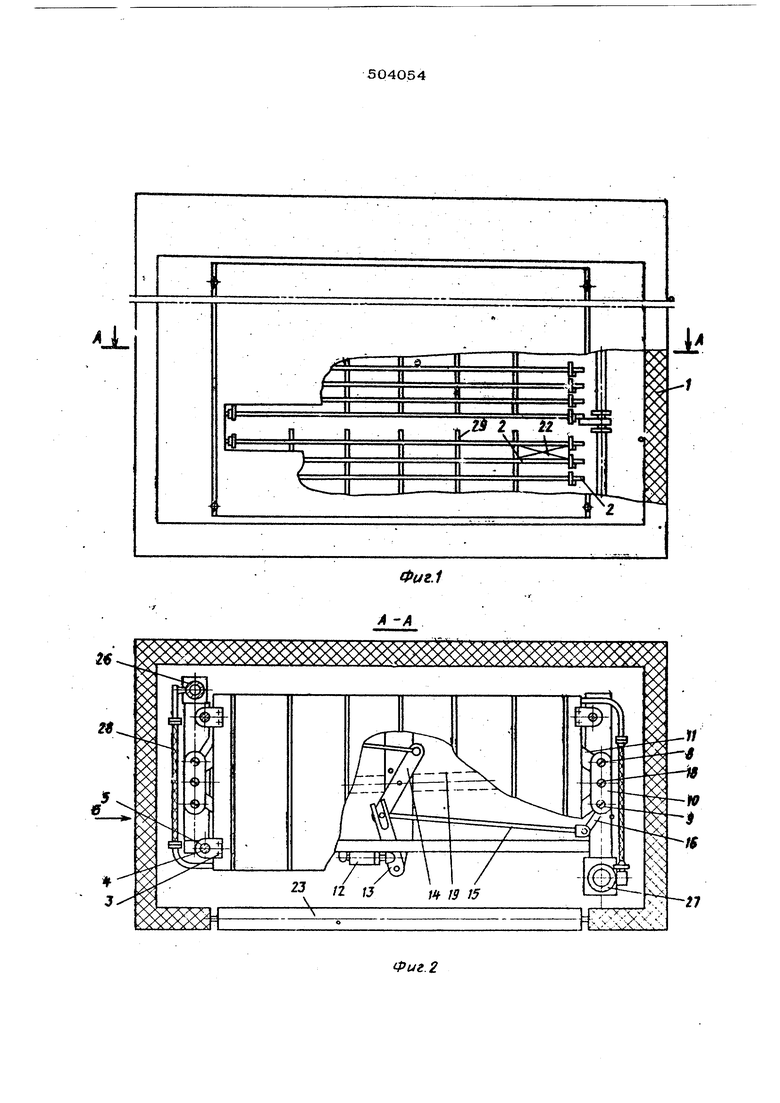

Изобретение относится к пищевой промышленности и может найти применение в плиточных морозильных аппаратах для заморозки пищевых продуктов. Известен морозильный аппарат, состояг;щий из теплоизолированного корпуса, смон тированных с возможностью вертикального перемещения теплообменных плит и механизма, перемещения плит. В известных морозильных аппаратах отсутствует синхронизация движения кареток, нет возможности обеспечить выборочный развод, значительную величину составляют теплопритоки и вследствие этого низка про изводительность. Цель изобретения - повысить производительность, обеспечить выборочный развод плит и снизить теплопритоки. Это достигается тем, что механизм перемещения плит состоит из попарно размещенных по боковым сторонам плит верти кальных направляюших и установленных на них кареток, каждая из которых имеет упоры, связанные с направляющими, а последние выполнены поворотными вокруг своей оси для обеспечения захода упоров в меж- плиточное пространство. Приводы кареток представляют собой ходовые винты, соединенные между собой цепной передачей и подключенные к общему гидромотору. Лицевая сторона корпуса аппарата выполнена в виде щторки с прорезью для за- грузки и выгрузки продуктов, перемещаемой при помощи валика, кинематически связанного с ходовым винтом. На фиг. 1 показан предлагаемый морозильный аппарат, вид спереди; на фиг. 2то же, разрез А-А; на фиг. 3 - то же, вид Б. Морозильный аппарат состоит из теплоизолированного корпуса 1, теплообменных плит 2, смонтированных с возможностью вертикального перемещения благодаря наличию кронщтейнов 3 и втулок 4 по колоннам 5, которые создают несущий каркас, связывая рамы нижнюю 6 и верхнюю 7iH механизма перемещения плит, Послод- НИИ состоит из nonapiio размоиюнных по
боковым сторонам плит вертикальных направляюихих 8 н 9 и установленных на них кареток 1О, каждая из которых имеет упо ры 11, связанные с направляющими, выполненными поворотными вокруг своей оси для обеспечения захода упоров в межплиточное пространство.
Поворот направляющих вокруг своей ос осуществляют при помощи гидроиилиндра 1 через рычаг13, качалку 14, тяги 15, плечи 16 и шестерни 17.
Приводы кареток представляют собой ходовые винты 18, соединенные между собой цепной передачей 19 и подключен1нт те к общему гидромотору 20.
Лицевая сторона корпуса аппарата выполнена в виде шторк. 21 с прорезью для загрузки и выгрузки продуктов 22, перемешаемой посредством валика 23, который через червячную передачу 24 и коническую пару 25 связан с ходовым винтом
Подачу хладагента для заморозки продукта и отвод паровой фазы осуществляют соответственно через коллекторы 26 и 27 соединенные с теплообменными плитами гибкими шлангами 28.
Нижняя теплообменная плита лежит на нижней раме, а последующие - на ограничителях 29, приваренных к верхней рабочей поверхности камерой теплообмешюй плиты. А на верхней теплообмешюй плите закреплен груз ЗО, осуществляющий под-о прессовку замораживаемого продукта.
Морозильный аппарат работает следующим образом.
Для подъема любой, кроме нижней, теплообменной плиты 2 в автоматическое устройство вводят нужное количество Ht пульсов. .
Гидромотор 20 вращает ходовые винты 18, связанные между собой цепной передачей 3 9, перемещающие каретки 10 по вертикальным направл$пощим 8 и 9 до уровня заданной теплообмешюй плиты. Одновременно происходит перемещение щторки 21 с прорезью.
При остановке каретки 10 на заданном уровне срабатывает гидроцилиндр 12 и через систему рычагов разворачивает направляющие 8 и 9, на которых зафиксированы упоры 11. Последние входят в межплиточное пространство, после чего повторно включают гидромотор 20, перемещающий каретки 10 с упорами 11 до контакта с опорной поверхностью теплооб- менной плиты. Дальнейший подъем теплообменной плиты происходит до нй)6хрдй-, мого раскрытия межплиточного пространства, после чего теплообменную плиту 2 удерживают упоры 11 до окончания за5 .грузки или выгрузки.
Загрузку или выгрузку продукта 22 производят через прорезь шторки 21, со&мешенной с открытым межплиточным объемом.
0После выполнения операции в автоматическое устройство вводят импульсы, соответствующие плите, загрузку или выгрузку которой необходимо произвести.
Гидромотор 20, вращая ходовые винты 18,
5; опускает каретку 10 с упорами 11 и лежащей на них теплообмешюй плитой 2 до контакта ее с п|юдукгр л 22 и освобождения упоров 11. Гидроцилиндр 12 выводит упоры 11 из межплиточного пространства.
0 Дальнейшим вращение ходовых винтов 18 от гидромотора 20 каретку 10 перемещают до заданного уровня. Цикл повторяют.
Формула изобретения
J.
rtr
t
JL
qJN
TTar
iK« г У тм
Фиг. 2 м
