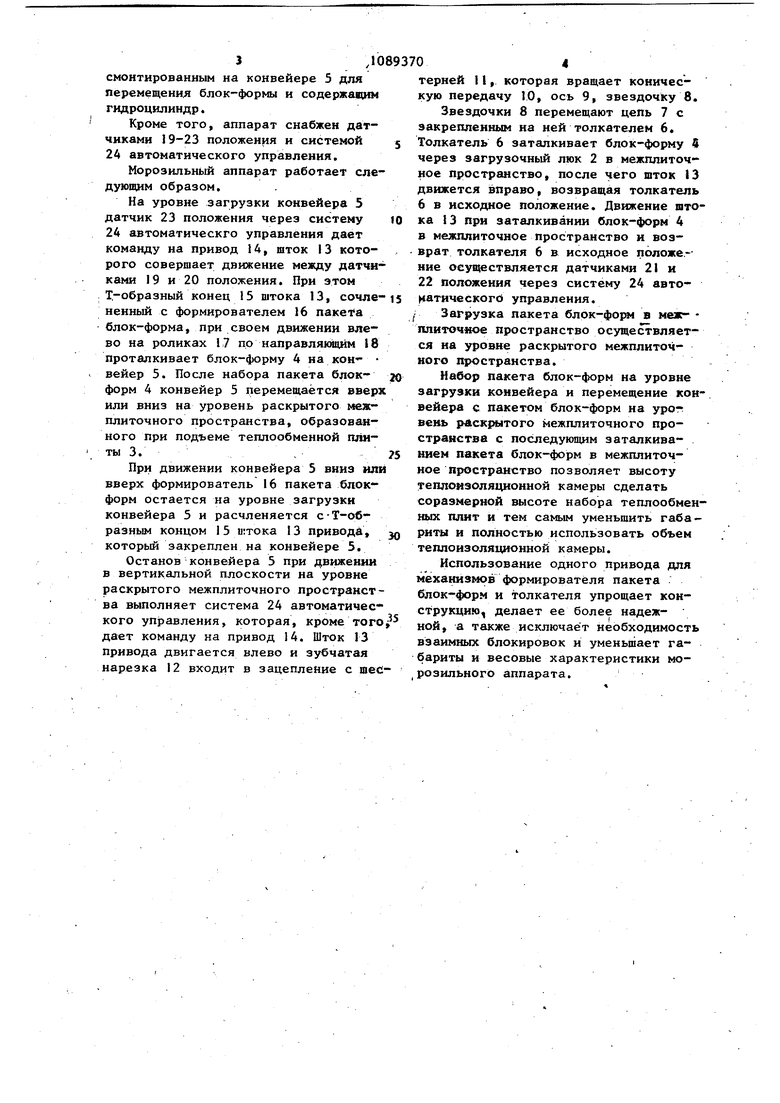
Изобретение относится к холодиль ному технологическому оборудованию, а именно, к плиточньпч аппаратам для замораживания пищевых продуктов. Известны морозильные аппараты, содержа1цие теплоизолированный корпус с загрузочным и разгрузочным отверстиями, горизонтально размещенные в нем с возможностью вертикального перемещения теплообменные плиты, конвейер (загрузочная и разгрузочная рельсовая колея |, по которому перемещаются блок-формы {контейнеры с пищевыми продуктами, толкатель (нажимные планки ) и система автоматического управления Cl./ В этом морозильном аппарате блокформы проталкиваются в межплиточное пространство по одной и требуют при этом раскрытия всех межплиточных пространств, что приводит к нарушению теплового контакта между всеми блок-формами и теплообменными Плитами на время проталкивания каждой блок-формы в межплиточное простран ство, что в свою очередь влечет за собой понижение производительности парата. Кроме того, нахождение толкателя в объеме теплоизолированного корпуса вызывает увеличение габаритов последнего, затрудняет доступ к механизму и ухудшает его работу, так как в теплоизолированном корпусе отрицательная температура. Наиболее близким к предлагаемому является известный морозильный аппарат, содержащий теплоизолированный корпус с загрузочным люком, тепл рбменныё плиты, установленные в корпу.се с возможностью вертикального перемещения,формирователь пакета блок-форм, толкатель с приводом, кон вейер для перемещения блок-форм и систему автоматического управленняС2 В этом аппарате загрузку блокформ происходит пакетами, что уменьшает время отсутствия контакта блокформ с теплообменными плитами, но загрузка пакета блок-форм на постоян ном уровне требует перемещения теплообменных плит на уровень загрузки, что приводит к увеличению габаритов аппарата и неполному использованию объема теплоизолированного корпуса, так как каждое раскрытие межплиточно го пространства по очереди должно устанавливаться на уровне загрузки и высота теплоизолированного корпуса должна быть не менее двойной высоты набора теплообменных плит. Цель изобретения - полное использование объема теплоизолированного корпуса морозильного аппарата и умень шение тем саьв.1м габаритов аппарата. Поставленная цель достигается тем, что в морозильном аппарате, содержащем теплоизолированный корпус с загрузочным люком, теплообменные плиты, установленные в корпусе с возможностью вертикального перемещения, формирователь пакета блок-форм, толкатель с приводом, конвейер для перемещения блок-форм и систему автоматического управления, формирователь пакета блок-форм и толкатель имеют общий привод, смонтированный на конвейере для перемещения блокформ, конвейер имеет средства для вертикального перемещения, при этом привод содержит гидроцилиндр, конец щтока которого выполнен Т-образным и имеет зубчатую нарезку, а формирователь пакета блок-форм имеет паз для взаимодействия с Т-образным концом штока и установлен на уровне загрузки конвейера. . На фиг. I изображен морозильный аппарат, вид сбоку в позиции нахождении конвейера на уровне загрузки пакета |блок-форм в морозильный аппарат; на фиг, 2 - то же, сечение в позициинахождения механизмов на уровне загрузки конвейера. Аппарат содержит теплоизолированный корпус I с загрузочным люком 2, теплообменные плиты 3, установленные в jcopnyce с возможностью вертикального перемещения, блок-формы 4, конвейер 5 для перемещения блок-формы, толкатель 6, закрепленный на цепи 7, которая взаимодействует со звездочками 8. Ось 9 через зубчатую коническую передачу 10 связана с шестерней 1 I, которая в свою очередь взаимодействует с зубчатой нарезкой 12, выполненной на штоке 13, привода.14. Т-образный конец 15 штока 13 взаимодействует с пазом формирователя 16 пакета блок-форм, КОТО1ШЙ установлен на уровне загрузки конвейера. Кроме того, аппарат снабжен роликами 17, установленными в направляющих 18, а конвейер 5 имеет средства для вертикального перемещения. При этом толкатель 6 и формирователь 16 пакета блок-форм приводятся в действие общим приводом 14 смонтированным на конвейере 5 для перемещение блок-формы и содержащим гидроцилиндр. Кроме того, аппарат снабжен датчиками 9-23 положеиия и системой 24 автоматического управления. Морозильный аппарат работает следующим образом. На уровне загрузки конвейера 5 датчик 23 положения через систему 24 автоматическго управления дает комаиду на привод 14, шток 13 которого совершает движение между датчи ками 19 и 20 положения. При этом Т,-образный конец 15 штока 13, сочле ненный с формирователем 16 пакета блок-форма, при своем движении влево на роликах 17 до направлякйцим 18 проталкивает блок-форму 4 на кон вейер 5. После набора пакета блокформ 4 конвейер 5 перемещается ввер или вниз на уровень раскрытого межплиточного пространства, образованного при подъеме теплообменной плиты 3., При движении конвейера 5 вниз ил вверх формирователь 16 пакета блокформ остается на уровне загрузки конвейера 5 и расчленяется с-Т-образным концом 15 ттока I3 привода, который закреплен на конвейере 5. Останов конвейера 5 при движении в вертикальной плоскости на уровне раскрытого межплиточного простраист ва выполняет система 24 автоматичес кого управления, которая, кроме тог дает команду на привод 14. Шток 13 привода двигается влево и зубчатая нарезка 12 входит в зацепление с ше терней II, которая вращает коническую передачу 10, ось 9, звездочку 8. Звездочки 8 перемещают цепь 7 с закрепленным на ней толкателем 6. Толкатель 6 заталкивает блок-форму 5 через загрузочный люк 2 в межплиточиое пространство, после чего шток 13 движется вправо, возвращая толкатель 6 в исходное положение. Движение штока 13 при заталкивании блок-форм 4 в межплиточное пространство и возврат толкателя 6 в исходное положе.ние осуществляется датчиками 21 и 22 положеиия через систему 24 автоиатнческогс) управлеиия. Загрузка пакета блок-форм в мех- плиточное пространство осуществляется на уровне раскрытого межплиточного пространства. Набор пакета блок-форм на уровне загрузки конвейера и перемещеиие конвейера с пакетом блок-форм на урог вень раскрытого межплиточного пространства с последующим заталкиванием пакета блок-форм в межплиточное пространство позволяет высоту теплоизоляционной камеры сделать соразмерной высоте набора теплообменш 1Х плит и тем самым уменьшить габариты и полностью использовать объем теплоизоляционной камеры. Использование одного привода для механизмов формирователя пакета блок-форм и толкателя упрощает конструкцию, делает ее более надежной, а также исключает необходимость взаимных блокировок и уменьшает габариты и весовые характеристики морозильного аппарата.
Фи,г.2.
7}f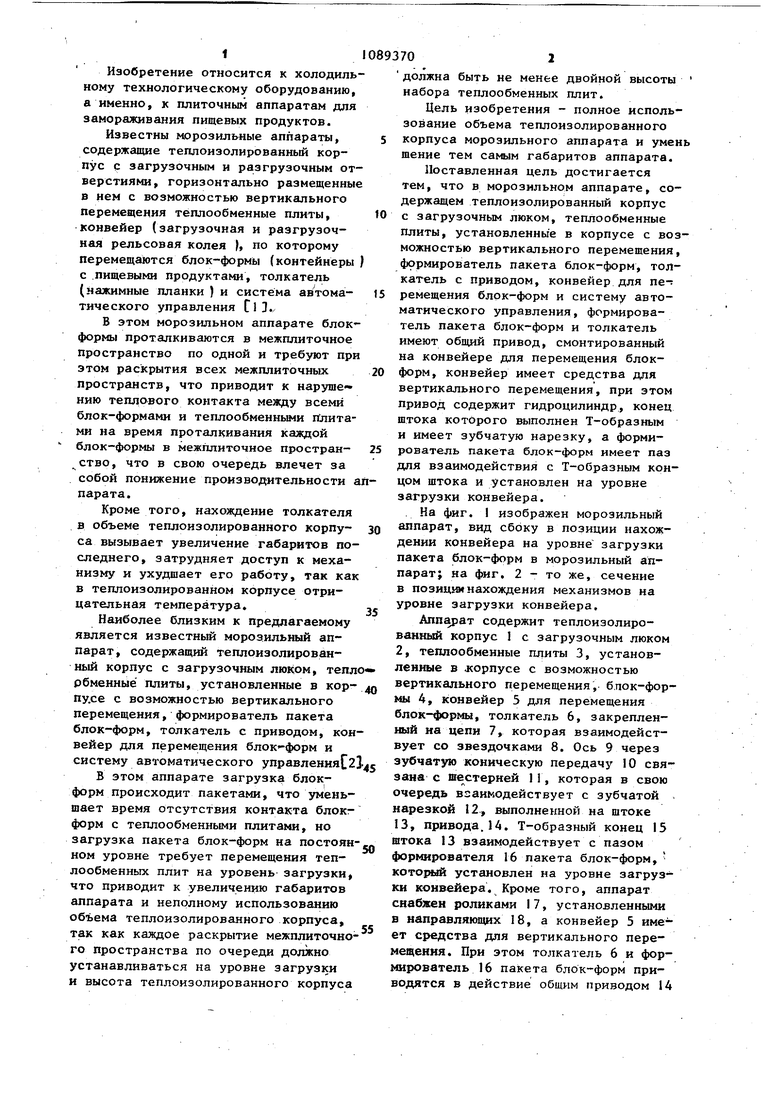
| название | год | авторы | номер документа |
|---|---|---|---|
| Морозильный аппарат | 1974 |
|
SU504054A1 |
| Морозильный аппарат | 1979 |
|
SU836468A1 |
| Разгрузочное устройство плиточного морозильного аппарата | 1982 |
|
SU1133461A1 |
| Камера для замораживания продуктов | 1980 |
|
SU991114A1 |
| Морозильный плиточный аппарат | 1982 |
|
SU1057754A1 |
| Морозильный аппарат | 1978 |
|
SU763654A1 |
| Морозильный аппарат | 1974 |
|
SU522387A1 |
| Морозильный аппарат | 1981 |
|
SU1006880A1 |
| Морозильный аппарат | 1978 |
|
SU748097A1 |
| СКОРОМОРОЗИЛЬНОЕ УСТРОЙСТВО | 1974 |
|
SU365088A1 |
МОРОЗИЛЬНЫЙ АППАРАТ, содержащий теплоизолированный корпус с загрузочным люком, тегшообменные плиты установленные в корпусе с возможностью вертикального перемещения, формирователь пакета блок-форм, толкатель с Приводом, конвейер для пере-Г мещения блок-форм, и систему автоматического управления, отличающийся тем, что, с целью полного использования объема теплоизолированного корпуса и уменьшения тем самым габаритов аппарата, формирователь пакета блок-форм и толкатель имеют общий привод, смонтированный на конвейере для перемещения блокформ, конвейер имеет средства для вертикального перемещения, при этом привод содержит гидроцилиндр, конец штока которого выполнен Т-образным и имеет зубчатую нарезку, а 4ормирователь пакета блок-форм имеет паз i для взаимодействия с Т-образным концом штока и установлен на уровне за(Л 1ФУЗКИ конвейера. 00 со со Ksl
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для установки в тару вкладышей | 1986 |
|
SU1359211A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 2842253, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Реактивная дисковая турбина | 1925 |
|
SU1958A1 |
