Изобретение относится к ковочным манипуляторам, выполненным поворотными вокруг вертикальной оси и производящими продольное перемещение материала.
Предлагаемый манипулятор снабжен рольгангом и пневматическим приводом, выполненными переставными по высоте и действующими независимо друг от друга, что позволяет осуществлять продольную подачу материала от печи к ковочной машине без перемещения самого манипулятора.
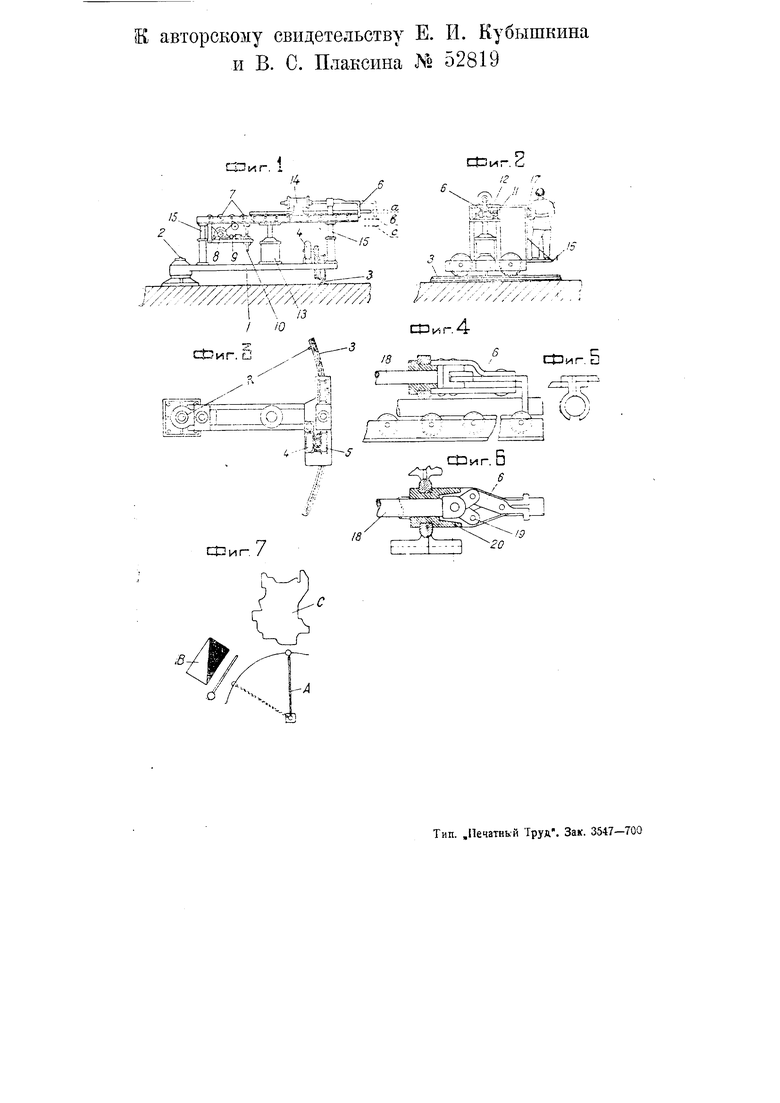
На чертеже фиг. 1 изображает вид ковочного манипулятора сбоку; фиг. 2- вид его сзади; фиг. 3-вид его сверху; фиг. 4-вид сбоку передней части рольганга и пневматического привода с захватом; фиг. 5-вид спереди привода; фиг. б-горизонтальный разрез его; фиг. 7 -схему установки.
Основание / манипулятора установлено поворотно на вертикальной оси 2, закрепленной в фундаментной плите.
Расположение манипулятора иллю стрируется схемой фиг. 7, где А-манипулятор, В-печь и С-ковочная машина.
Передвижение основания / манипулятора по рельсу 3, являющемуся
дугой круга радиуса R, размеры которого устанавливаются в зависимости от расположения печи и ковочной машины, производится при помощи электромотора с редуктором 4, передающим вращение через зубчатую передачу на колесо 5. Захват и подача материала производится посредством пневматического привода /, б и подвижного рольганга, действующих независимо друг от друга. Пневматический привод 14, 6 позволяет производить захват прутка в печи, посадку на рольганг 7, а затем вторичный захват, . подачу и удержание прутка во время ков.ки наиболее эффективным образом, полностью обеспечивая все необходимые при этом движения.
Рольганг 7 приводится в движение вторым мотором с редуктором 8, установленным на подвесной площадке 9. Конструкция площадки предусматривает возможность регулировки, при помощи болта Ю с гайками, напряжения проволочного каната, передающего движение роликам рольганга через блочки //, насаженные на ось роликов 12, имеющих выточку в соответствии с диаметром прутка, нагреваемого в печи.
Возможность работы механизма захвата с рольгангом на разных размерах диаметров прутка обеспечивается сменой захватных клещей 6 пневматическсго привода 14, б, которые изготовляются в соответствии с принятыми размерами прутков.
Дополнительные движения, необходимые для полного осуществления всех манипуляций при ковке на осадочно-ковочной машине, производятся двумя воздущными цилиндрами J3 и J4, работающими от существующей а кузнице воздушной сети с давлением I воздуха 5-7 атм.
Из этих цилиндров вертикальный | цилиндр /5 служит для подъема и i опускания рольганга 7 вместе с пнев- I матическим приводом М, 6 в соответствии с уровнем пода печи и ручьев I щтампов осадочно-ковочной машины; I различные по высоте положения а, j b и с рольганга 7 показаны пунктиром на фиг. 1.
Для обеспечения параллельности хода верхнего устройства захватного механизма вместе с рольгангом служат направляющие /5, расположенные симметрично относительно оси вертикального цилиндра J3. Эти же | направляющие снабжены амортизи- ; рующиг1и устройствами.
Второй горизонтальный цилиндр J4 -пневматического привода М, 6 слу- i
жит для подачи захвата и зажика прутка при всех необходимых манипуляциях. Схема действия захвата б показана на фиг. б. Зажим прутка происходит при движении штанги /t, соединенной с поршнем воздушного, цилиндра /4 через рычаги-захваты 6, связанные шарнирным соединением /Р и опирающиеся в нужный момент на конус 20.
Для подачи прутка зажимными клещами-захватами б на потребные расстояния по длине пользуются ограничителями подвижного типа, закрепляемыми на верхней части стола и соприкасающимися вплотную с постоянным зубом, находящимся на подвижном штоке воздущного цилиндра J4.
Предмет изобретения.
1.Ковочный манипулятор, поворотный вокруг вертикальной оси и производящий продольное перемещение материала, отличающийся тем, что, с целью осуществления .продольной подачи материала без перемещения самого манипулятора, последний снабжен рольгангом 7 и пневматическим приводом 74, б, действующими независимо друг от друга.
2.Форма выполнения манипулятора по п. 1, отличающаяся тем, что рольганг 7 и пневматический привод М, 6 выполнены переставными по высоте.
Е авторскому свидетельству Е. И. Кубышкина и В. С. Плаксина № 52819
| название | год | авторы | номер документа |
|---|---|---|---|
| Ковочный комплекс | 1987 |
|
SU1532305A1 |
| Ковочный комплекс | 1991 |
|
SU1787639A1 |
| Манипулятор для радиально-ковочных машин | 1974 |
|
SU554056A1 |
| Подающее устройство к горизонтальноковочной машине | 1976 |
|
SU574264A1 |
| Автоматизированная линия для получения заготовок тел вращения | 1986 |
|
SU1402396A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Комплекс для обработки заготовок | 1989 |
|
SU1731371A1 |
| Манипулятор | 1989 |
|
SU1796335A1 |
| Устройство для переноса заготовок по позициям матричного блока горизонтально-ковочной машины | 1988 |
|
SU1637928A1 |
| Подвесной ковочный манипулятор | 1936 |
|
SU51314A1 |
со иг. 7
.6
d Г-..
/9
20
