1
Изобретение относится к технике распределения, например, автоматически изделий или материалов с конвейеров по местам назначения и может быть использовано при автоматизации перемещающихся объектов по замкнутому кругу: конвейерных или цепных стеллажей, кран-балок в замкнутых автоматизированных линиях, поворачивающихся барабанов и др.
Известно устройство для автоматического управления перемещение.м подвижного объекта, содержащее задатчик адреса, соединенный с датчиками положения, блоком управления движением и блоком сравнения, состоящим из источника опорного сигнала и соединенных последовательно между собой разделительных диодов. Однако известное устройство не обеспечивает выбора кратчайшего пути адресования.
Цель изобретения - устранение указанного недостатка. Достигается это тем, что разделительные диоды блока сравнения соединены в кольцо.
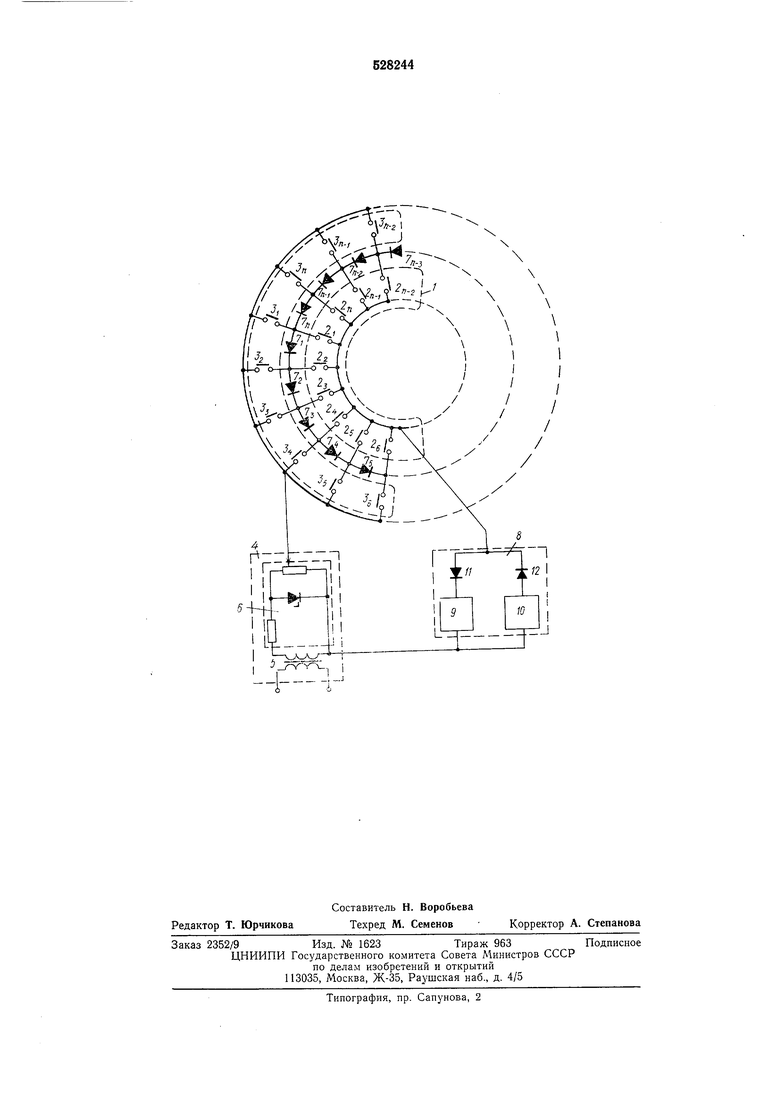
На чертеже приведена схема устройства для автоматического управления перемещением подвижного объекта.
Устройство содержит задатчик адреса 1, выполненный на переключателе позиций с контактами 2i-2п, соединенный с датчиками положения и блоком сравнения, выполненным на источнике 4 опорного сигнала, состоящим из источника 5 переменного напрял ения и стабилизатора 6 амплитуды, и на соединенных в кольцо разделительных диодах .
Кроме того, задатчик адреса подключен к блоку 8 управления двил ением с исполнительными элементами 9 и 10 и диодами 11 и 12. Устройство работает следующим образом. Задатчиком 1 задается адрес для передвпжения объекта, при этом могут возникнуть три случая.
Объект находится, например, над датчиком Зз. Переключателем задан этот же пункт следования, контакт 2з замкнут. В этом случае на
вход блока 8 управления движением поступают обе полуволны переменного напряжения. Через диоды И, 12 они поступают на исполнительные элементы 9, 10 управления движением объекта, выполненные на реле марки РЭС-22,
которые необходимо включать через полупроводниковые усилители на транзисторах типа п-р-л проводимости (например, МП37Б) для элемента 9 и типа р-п-р проводимости (например, МП25) для элемента 10. Элементы
управления движением срабатывают и своим) замыкающими контактами выдают сигнал «стоп. Объект останавливается.
Объект находится, например, над датчиком За, а Задатчиком адреса задан пункт следования 3 (контакт 2i переключателя задатчика адреса замкнут). В этом случае между позициями датчиков Зз и 3i образуются две параллельные ветви из последовательно соединенных диодов 72, 1 и 7з, 74,..., 7„. Так как стабилизированное по амплитуде переменное на- 5 пряжение приложено к позиции датчика Зз и должно поступить на позицию датчика Зь то отрицательная полуволна переменного напряжения может пройти только через первую ветвь диодов 72, 1, а положительная полуволна - только через вторую ветвь диодов 7$, 74,..., 7„. Первая ветвь по числу диодов меньше половины общего числа диодов, а амплитудное значение напряжения отрицательной полуволны равио суммарному падению напряжения на половине диодов, поэтому отрицательная полуволна переменного напряжения поступает иа контакт 2i переключателя и далее через диод 12 на вход элемента 10. Последний срабатывает и своим замыкающим контактом выдает команду на движение вправо. Положительная полуволна переменного напряжения на позицию датчика 3i не поступает, т. к. во второй ветви число диодов больше половины 25 их общего числа, а амплитудное значение напряжеиия положительной полуволны меньше половины суммарного падения напряжения на всех диодах. Объект начинает движение в сторону датчика 3i и, когда окажется над ним, 30 на вход блока 8 управления движением поступает и положительная полуволна переменного напряжения, которая через диод 11 включает исполнительный элемент 9. Включенные элементы 9, 10 своими замыкающимися кон- 35 тактами выдают команду «стоп. Движение объекта прекращается. Объект находится, например, над датчиком Зз, а переключателем задатчика адреса 1 задан пункт следования Зз (у переключателя 40 замкнут контакт 25). В этом случае между позициями датчиков Зз и Зз образуются две параллельные ветви из последовательно соединенных диодов 7, 7i, 7п, ,..., 7 к 7з, 7. Стабилизированное по амплитуде переменное 45 10 15 20 напряжение приложено к позиция датчика Зз и должно поступить на позицию датчика 85. В этом случае отрицательная полуволна переменного иапряжения может пройти только первую ветвь диодов 72, 1, 7п,..., 75, а положительная полуволна - только через вторую ветвь диодов 7з, 74. Первая ветвь диодов по их числу больше половины общего числа диодов, а амплитудное значение напряжения отрицательной полуволны равно суммарному падению напряжения на половине диодов, отсюда отрицательная полуволна переменного напряжения на позицию датчика Зз не поступает и элемент 10 не срабатывает. Элемент 10 своим размыкающим контактом выдает команду на движение влево. Поступление положительной полуволны переменного напряжения на позицию датчика ЗБ в данном случае зависит от числа диодов во второй ветви, поэтому элемент 9 может включаться до прихода объекта на заданную позицию датчика Зз и подготавливать выдачу устройством сигнала «стоп. Объект начинает движение в icropony датчика ЗБ и, -когда окажется над ним, на блок управления 8 поступают обе полуволны переменного напряжения. В результате исполнительные элементы оказываются включенными и устройство выдает команду «стоп. Движение объекта прекращается. Формула изобретения Устройство для автоматического управления перемещением подвижного объекта, содержащее задатчик адреса, соединенный с датчиками положения, блоком управления движением и блоком сравнения, состоящим из источника опорного сигнала и соединенных последовательно между собой разделительных диодов, отличающееся тем, что, с целью выбора кратчайшего пути адресования, разделительпые диоды блока сравнения соединены в кольцо.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вы-бОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU819018A2 |
| Устройство для автоматического управления перемещением подвижного объекта | 1987 |
|
SU1456347A1 |
| Устройство для управления лифтом | 1973 |
|
SU487824A1 |
| Устройство для автоматического управления передвижением объекта | 1976 |
|
SU646310A1 |
| Устройство для автоматическогоупРАВлЕНия дВижЕНиЕМ Об'ЕКТА | 1979 |
|
SU839922A1 |
| Устройство для автоматического выбора направления движения объекта | 1989 |
|
SU1669827A1 |
| Устройство для автоматического выбора направления движения объекта | 1980 |
|
SU900551A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1270089A1 |
| Устройство для автоматическогоВыбОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU800071A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1184768A1 |