1
Изобретение относится к области транспортной техники и предназначено д;1я регулирования положения или направления движения различного рода перемещающихся объектов: лифтов подъемников загрузочных и др. с автоматическим выбором направления движения и адресованием.
Известно устройство для автоматического выбора направления движения, содержащее источник питания, поляризованное реле, включенное в мостовую схему, переключатель грузовых подвесок стеллажа, трансформатор с двумя вторичными обмотками, одна из которых секционирована, причем выводы вторичных обмоток трансформатора соединены с выпрямительными диодами мостовой схемы, а выходы мостов соединены встречно между собой через катущку поляризованного реле и каждый мост нагружен на свой резистор 1).
Недостатком такого устройства является его сложность и низкая надежность его работы.
Наиболее близким техническим решением к данному изобретению является устройство для автоматического управления перед вижением объекта, содержащее элементы задання адреса, датчики положения объекта, одни из выводов кotopыx соединены между собой, а другие - с соответствующими выводами элементов задания адреса, другие выводы -которых соединены между собой и подключены к параллельно соединенным через встречно включенные диоды командным блокам, разделительные элементы, включенные между точками соединения выводов датчиков положения и элементов задания адреса, и блок пн1;ания (2.
.Недостатком его является то, что оно ненадежно, так как останов привода объекта осуществляется включенным состоянием обоих командных блоков, что может привести к ошибке или к аварийной ситуации при выходе из строя одного нз командных блоков, которые не дадут команды на останов привода у заданной позиции и объект будет продолжать движение в том же направлении. Кроме того, указанное устройство не позволяет получать дополнительные команды, например, на снижение скорости движения объекта после прохождения предпоследней гГозиции, что необходимо для обеспечения точности останова у заданной позиции при сохраним в промежутках рабоей скорости объекта, т. е. повышении прозводительности работыобъекта.
Цель изобретения - повышение надежости работы.
Это достигается тем, что блок питания ыполнен на источнике постоянного тока и 5 включен через ограничительный элемент поледовательно с разделительными элеменами, вторая точка параллельного соединения командных блоков соединена с точкой соединения выводов датчиков положенная объекта и параллельно ему включен релейный элемент.
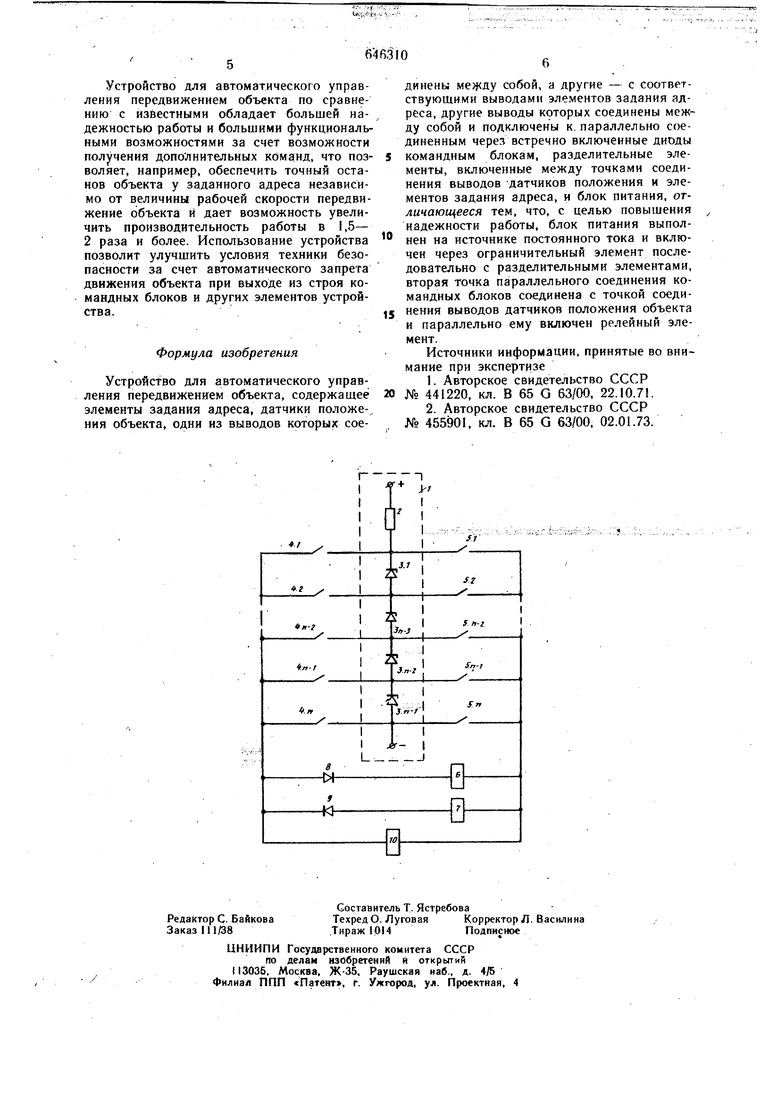
На чертеже показано описываемое устройство.
Устройство содержит источник питания 1 постоянного тока, ограничительный эле- is мент 2, соединенный последовательно с разделительными элементами 3.1-З.п-1, образующими многоступенчатый делитель напряжения, датчики положения объекта с контактами 4.1-4.п, элементы задания адреса с контактами 5.1-5.п, командные блоки 6 и 7, Т.ИОДЫ 8 и 9 и релейный элемент 10. В качестве разделительных элементов 3.1-З.п-1 многоступенчатого делителя напряжения источника постоянного тока могут быть нспбльзованы, например, резисторы, 35 конденсаторы, стабилитроны или последовательно соединенные независимые источники постоянного тока одинакового напряжения.
Число разделительных элементов 3.1-З.п -1 должно быть не менее п-I, где 30 п - число рабочих позиций объекта. Величины напряжений каждой ступени многоступенчатого делителя должны быть неизменны и равны между собой.
Напряжение срабатывания релейного элемента 10 равно удвоенному напряжению одной ступени делителя, а напряжение отпадания его равно напряжению одной ступени делителя. В качестве ограничительного элемента 2 может быть использован, например, резистор. Вместо двух командных бло- 40 ков может быть использовано одно поляризованное реле.
Устройство работает сл дующим образом. Если, например, объект находится у дат- . чика положения с контактом 4.1, а пункт следования задан элементом задания адре- 5 са с контактом 5.1, то оба эти контакта окажутся замкнутыми, но ток через командные блоки 6 и 7 протекать не будет, так как разность потенциалов на командных блоках 6 и 7 будет равна нулю. В результате jo оба командных блока будут выключень, что эквивалентно команде «Стоп. Если объект йа ходнтся у датчика положения с контактом 4.1, а замкнут контакт 5.п-1 элемента задания адреса, то в этом случае к точке соединения диодов 8,9 и релейного элемента 55 Ю подводится положительный потенциал напряжения с трех ступеней делителя, а к точке соединения командных блоков 6 и 7
и релейного элемента 10 - отрицательный потенциал напряжения с трех ступеней делителя. Срабатьшает командный блок 6 и релейный элемент 10. Командный блок 6 выдает команду «Вперед или «Вверх. Объект начинает движение в сторону датчика положения с контактом 4.п-1. При дости-. жении объектом датчика положения с контактом 4.П-2, напряжение, приложенное к релейному элементу 10 и командному блоку 6, становится равным напряжению одной ступени, что вызывает отпадание релейного элемента 10 и появление в связи с этим команды. Но объект продолжает двигаться, так как командный блок 6 включен. При прохождении объектом определенного пути, отсчитанного считывающим узлом (на чертеже не показано), на который уже поступила команда при отпадании релейного элемента 10, на привод передвижения объекта подается дополнительная команда на снижение скорости вблизи датчика положения с контактом 4.П-i. При достижении объектом этого датчика отключается командный блок 6, что соответствует команде «Стоп. Движение прекращается, объект останавливается точно у заданного адреса.
Если объект находится у датчика положения с контактом 4.п-1, а с помощью элемента задания адреса замкнут контакт 5.п-2, то в этом случае к точке соединения диодов
8и 9 и релейного элемента 10 подводится отртщательный потенциал напряжения с одной ступени делителя, а к точке соединения командных блоков 6, 7 и релейного элемента 10 положительный потенциал с одной ступени делителя.
Срабатывает командный блок 7, который выдает команду «Назад или «Вниз. Объект начинает движение в сторону датчика положения с контактом 4.п-2. Одновременно с этим поступает команда с выключенного релейного элемента 10 на считывающий узел, который при прохождении объектом определенного пути выдает дополнительную команду на снижение скорости вблизи датчика положения с контактом 4.а-2 и при достижении объектом этого датчика, командный блок 7 отключается, что соответствует команде «Стоп.
Движение прекращается, объект останавливается точно у заданного адреса. Движение объекта между другими контактами элемента задания адреса и другими контактами датчика положения происходит аналогично описанному.
Если по какой-то причине {плохой контакт датчика положения, элемента задания адреса, выход из строя диодов 8 или
9или командных блоков 6 или 7) исчезает напряжение во время движения объекта на командном блоке 6 или 7, то они сразу же отключаются, что соответствует команде «Стоп. Движение объекта прекращается.
Устройство для автоматического управления передвижением объекта по сравнению с известными обладает большей надежностью работы и большими функциональными возможностями за счет возможности получения дополнительных комаид, что позволяет например, обеспечить точный останов объекта у заданного адреса независимо от величины рабочей скорости передвижение объекта и дает возможность увеличить производительность работы в 1,5- 2 раза и более. Использование устройства позволит улучшить условия техники безопасности за счет автоматического запрета движения объекта при выходе из строя командных блоков и других элементов устройства.
Формула изобретения
Устройство для автоматического управления передвижением объекта, содержащее элементы задания адреса, датчики положения объекта, одни из выводов которых соединены собой, а другие - с соответствующими выводами элементов задания адреса, другие выводы которых соединены между собой и подключены к. параллельно соединенным через встречно включенные диоды командным блокам, разделительные элементы, включенные между точками соединения выводов датчиков положения и элементов задания адреса, и блок питания, отличающееся тем, что, с целью повышения надежности работы, блок питания выполнен на источнике постоянного тока и включен через ограничительный элемент последовательно с разделительными элементами, вторая точка параллельного соединения командных блоков соединена с точкой соединения выводов датчиков положения объекта и параллельно ему включен релейный элемент.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 441220, кл. В 65 G 63/00, 22.10.71.
2.Авторское свидетельство СССР № 455901, кл. В 65 G 63/00, 02.01.73.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
| Устройство для автоматического выбора направления движения объекта | 1980 |
|
SU900551A1 |
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1146260A1 |
| Устройство для автоматического вы-бОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU819018A2 |
| Устройство для автоматического управления перемещением подвижного объекта | 1987 |
|
SU1456347A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1502442A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1270089A1 |
| Устройство для автоматическогоупРАВлЕНия дВижЕНиЕМ Об'ЕКТА | 1979 |
|
SU839922A1 |
| Устройство для позиционного управления приводом подъемника | 1976 |
|
SU667479A1 |
| Устройство для автоматического адресования объекта | 1975 |
|
SU640915A1 |
