(54) АВТОРУЛЕВОЙ


| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ГИДРОДИНАМИЧЕСКИХ КОЭФФИЦИЕНТОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 2013 |
|
RU2535777C1 |
Изобретение касается управления судами, в частности управления курсом судна,
.Известен авторулешой, в котором для улучшения качества управления используются сигналы курса, производной курса, второй производной курса и сигнал от датчика положения руля 1.
Однако использование сигналов курса, производной курса и второй производной курса особенно при развитом морском волнении приводит к чрезмерной перегрузке рулевого привода из-за высокого уровня возмущений и помех, и авторулевой в этом случае приходится отключать и переходить на ручное управление.
Наиболее .близким по технической сущности к П редла1гаемО|Му изобретению является авторулевой, в котором для сокращения колвчества перекладок руля при одновременном улучшении качества стабилизации использована модель угловой скорости курса, что позволило отказаться от сигнала угловой скорости курса, получаемого дифференцированием сигнала с датчика курса с высоким уровнем помех и возмущений 2.
В известном авторулевом на вход модели угловюй скорости курса судна подается сигнал с датчика угла перекладки руля и поэтому полученный на выходе модели сигнал пропорционален только составляющей угловой скорости курса судна от управления (угла лерекладки руля).
Недостатком авторулевого является то, что при управлении курсом судна, когда происходит изменение динамических характеристик судна (изменение скорости хода, осадки, загруэки и т. п.), в законе управления рулевым приводом
10
Р /СгЛф + /С2 ш + /Сзб
отсутствует составляющая угловой скоросjg ти курса судна от изменения динамических характеристик судна. Следствием этого является значительное (снижелие качества стабилизации курса судна.
Целью изобретения является (повышение точности автоматической стабилизации
20 курса при изменяющихся динамических характеристиках судна.
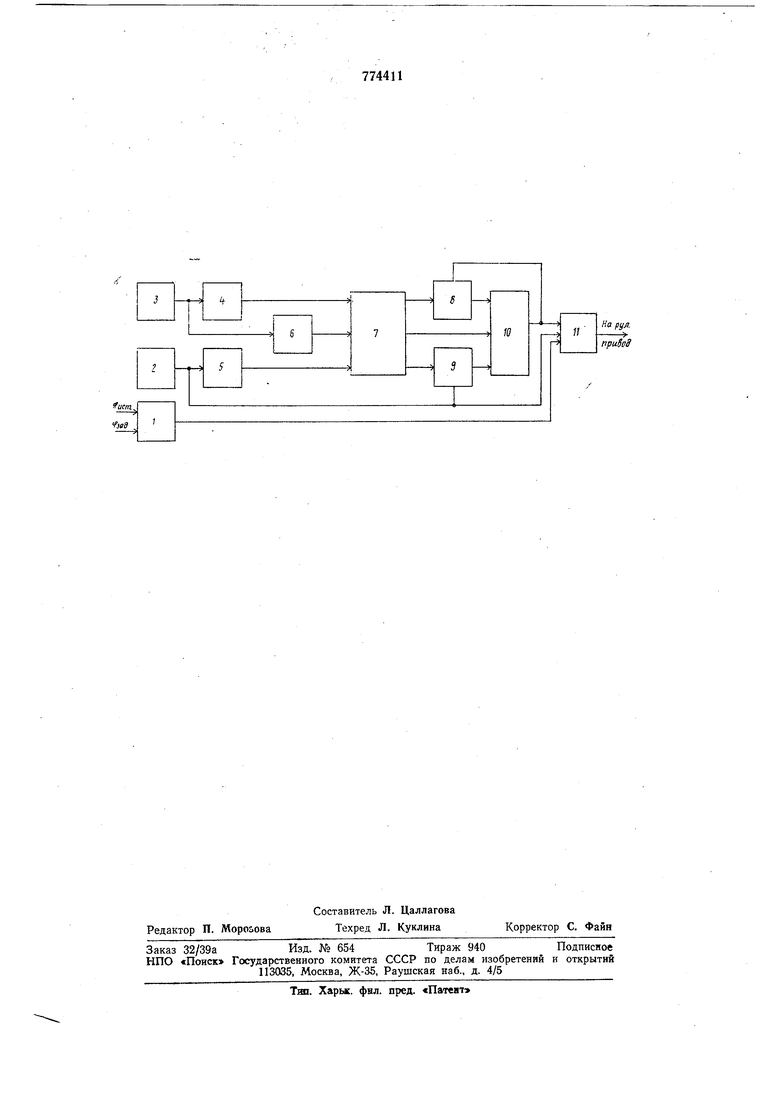
Поставленная цель достигается тем, что авторулевой, содержащий блок угла рас25согласования по курсу, датчик угла перекладки руля и блок моделирования угловой скорости судна, выходы которых подключены соответственно к первому, второму и .третьему входам усилителя мощности, и 30 датчик угловой скорости судна, введены первый фильтр, дифференциатор, первый блок произведения и последовательно соединенные второй фильтр, идентификатор параметров судна и второй блок произведения, выход которого подключен к входу блока моделирования угловой скорости судна, а второй вход - к выходу датчика угла перекладки руля и к входу второго фильтра, вход первого фильтра подключен к выходу датчика угловой скорости судна и через дифференциатор - к второму входу идентификатора параметров судна, а выход - к третьему входу идентификатора параметров судна, второй выход которого через первый блок произведения подключен к второму входу блока моделирования угловой скорости, а третий выход - к третьему входу блока моделирования угловой скорости судна, выходом соединенного с вторым входом первого блока произведения. Наличие идентификатора параметров судна позволяет автоматически подстраивать параметры модели угловой скорости судна под воздействием изменения динамических свойств судна, что улучшает качество управления курсом судна. На чертеже приведена функциональная схема авторулевого. Он содержит блок 1 угла рассогласования по курсу, датчик 2 угла перекладки руля, датчик 3 угловой скорости судна, фильтры 4 и 5, дифференциатор б, идентификатор 7 параметров судна, блоки 8 и 9 произведения, блок 10 моделирования угловой скорости судна, усилитель 11 мощности. Авторулевой работает следующим образом. Упрощенное уравнение математической модели угловой скорости судна имеет вид: л 1 Л-5 . Яб ..... ш - - W- о §0,(1) где (О - угловое ускорение судна; /Cs - коэффициент эффективности руля;б - угол перекладки руля; бо - балансировочное значение угла перекладки руля - величина постоянная для каждого судна и данного режима плавания. Перенесем все члены уравнения (1) в правую часть и обозначим эту величину через невязку е: S (В + со -h -Y + При изменении режима плавания судна, т. е, загрузки, глубины под килем, скорости хо- 65 а, изменяются параметры в блоке моделиования угловой скорости судна, в частноси величины 1/Г,/Сг.Т, --SuПри подстановке текущих значений со и в уравнение .невязки (2) последняя не бует равна .нулю, если /матаматическая моель -не соответствует протекаемому проессу. Чтобы в блоке 10 угловая скорость суда соответствовала реальной, необходимо ак перестро/ить величины 1/Г, Ко/Т,- 5д, тобы невязка е уравнения (2) равнялась улю. Для идентис{)икации трех параметров удна /Т, /Со/Т, - используются три равнения поиска: А Ц ш.г,:- Т - о. -. , (3) со, + 8, г 1 dt Т W/- -1- °V Af / dt / де -а коэффициент идентификации, выбирается экспериментально, исходя из двух условий: для малой величины ос процесс идентификации слищком затянут, для больщой величины а и наличия возмущений процесс идентификации происходит с больщими искажениями. Уравнения (3, 4, 5) решаются в идентификаторе 7 параметров судна. Величину углового ускорения судна О) )i| в уравнении невязки (2) получаем в блоке 6. Получаемый после дифференцирующего звена сигнал «|/| имеет фазовые погрещности, которые приводят к погрешностям при расчете величины невязки . Поэтому для выравнивания фаз сигналы иб|) необходимо пропускать через одинаковые фазосдвигающие фильтры вида: F(P) Использование таких фильтров эквивалентно применению оператора F(p) к выражению невязки 8, т. е. F(p)z -- . Тогда: 1 , Яг, 1 5 s , + у / + у оЛ
Найденные по уравнениям (3, 4, 5) величиLf
ны 1/Г, Кб/Т и - бо поступают на вход
блока моделирования угловой скорости судна 10, перестраивая его так, чтобы невязка , формируемая идентификатором параметров судна 7 по уравнению 6, стремилась к нулю.
В блоках 8 и 9 произведения на выходе формируются соответственно сигналы:
1л я - con-S.
Перестройка блока моделирования угловой скорости судна приводит к тому, что на входе усилителя 11 мощности формил
руется сигнал «, наиболее полно отражающий настоящие (изменяющиеся) динамические характеристики судна. Это значит, что в управлении движением курса судна постоянно присутствует информация об изменяющихся динамических характеристиках судна.
Предлагаемый авторулевой позволит также уменьшать И1Нте1Н1аи1в.ность (частоту и амплитуду) перекладок руля, особенно при действии развитого морского волнения, повысить помехозащищенность каналов управления..
i
Формула изобретения
Авторулевой, содержащий блок угла рассогласования по курсу, датчик угла
перекладки руля и блок моделирования угловой скорости судна, выходы которых подключены соответчгтвенно к первому, второму и третьему входам усилителя мощности, и датчик угловой скорости судна, о тличающийся тем, что, с целью повыщения точности авторулевого, он содержит первый фильтр, дифференциатор, первый; блок произведения и последовательно соединенные второй фильтр, идентификатор и последовательно соединенные второй фильтр, идентификатор параметров судна и второй блок произведения, выход которого подключен к первому входу блока моделирования угловой скорости судна, а второй вход - к выходу датчика угла перекладки руля и к входу второго фильтра, вход первого фильтра подключен к выходу датчика угловой скорости судна и через дифференциатор - к второму входу идентификатора параметров судна, а выход - к третьему входу идентификатора параметров судна, второй выход которого через первый блок, произведения подключен к второму входу
блока моделирования угловой скорости судна, а третий выход - к третьему входу блока моделирования угловой скорости судна, выходом соединенного с вторым входом первого блока произведения.
Источники информации, принятые во внимание при экспертизе:
