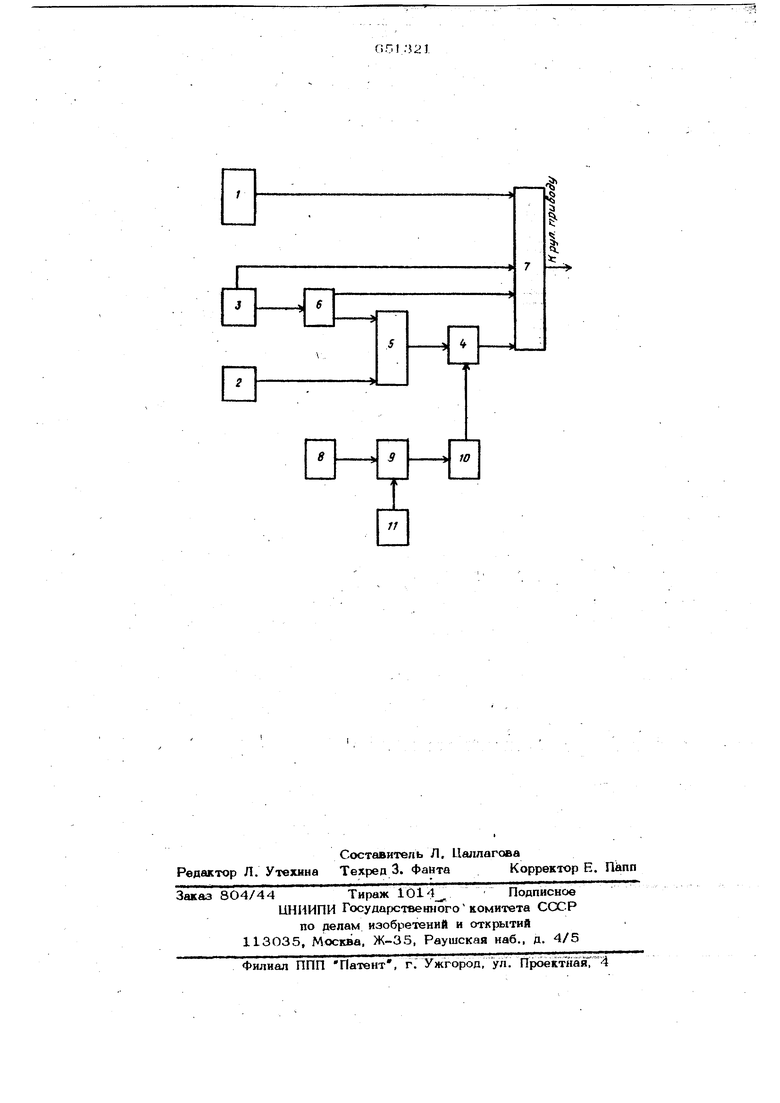
(54) АВТОРУЛЕВОЙ тель, блок сравнения, датчик нагрузки рулевого привода и задатчик нагрузки рулевого привода, выход которого подключен к первому входу блока сравнени ко второму входу которого подключен датчик нагрузки рулевого привода, а выход блока сравнения через переключатель соединен с другим входом фильт ра. На чертеже показана функциональная схема авторулевого. Авторулевой содержит датчик угла рассогласования по курсу 1, датчик угловой скорости 2, датчик угла переклад ки руля 3, фильтр 4j вычитающее устройство 5, модель 6 угловой скорости судйа, усилитель, мощности 7, датчик 8 нагрузки рулевого привода, блок сравнения 9, переключатель 10, задатчик 11. нагрузки рулеворо привода. Полученная с помощью датчика нагрузки реальная нагрузка рулевого привода сравнивается с допустимой нагрузкой и, если эта величина превышает до-пустимое значение, вырабатьшается сиг нал о перегрузке рулевого привода. Полученное значение нагрузки рулевого привода уточняется через фиксированные интервалы времени. Когда уровень внешних возмущений ниже допустимого, степень фильтрации сигнала угловой ско рости судна в фильтре слабая. Если уровень возК ущений выше допустимого, степень фильтрации (ослабления) составл щей сигнала угловой скорости судна от внешних возмущений значительно больше до полной фильтрации этого сигнала. Авторулевой работает в двух режимах: при спокойном море и при сильном волнении на море. Режим спокойного моря. В этом режиме на вход усилителя мощности 7 приходит сумма1рный сигнал 6 ДЦ)) + (ф-ф) + 5, где &( - сигнал рассогласования по курсу, формируемый в датчике 1; ф - корректированная оценка сигнала угловой скорости, вырабатывае мая в модели угловой скорости суд,.®А, kjp- (р) - разность сигнала полной угловой скорости судна ф и ее опенки m , формируемая в вычитающем уст ройстве 5: 8 - сигнал от датчика угл( перекладки руля 3. в режиме спокойного моря сигнал ( ф - (р ) полностью или почти полностью проходит через фильп-р -1, у кото|Х)го в этом режиме степень фильтрации невелика. Это достигается за счет переключателя 10, который переключает степень фильтрации фильтра 4 в зависимости от нагрузки рулевого привода. В данном случае сигнал с датчика 8 меньше .сигнала с задатчика 11 и п6этому переключатель 10 включает малую степень фильтрации в фильтре 4. При этом сигнал ( ( - ц ) свободно проходит на усилитель мощности 7 и на управление рулевым приводом. Режим сильного волнения на море. При работе в этом режиме на вход усилителя мощности 7 подается сигнал .Л сг O utp-tf+D. В этом случае сигнал (if - Ц ) с вычитающего устройства 5 почти не п-роходит через фильтр 4, у которого в данном случае включена сильная степень фильтрации. В этом режиме сигнал с датчика 8 равен сигналу с задатчика 11 или больше его. Благодаря этой разнице степень фильтрации переклхэчаетея в фильтре 4 на более сильную, /- Использование предлагаемого авторулевого позволяет повысить точность движения судна, а следовательно, уменьшить время рейса в тихую погоду на 1-3%, а также сократить сопротивление движению судна в штормовую погоду благодаря сокращению перекладок руля. Экономическая эффективность иЬпользования рулевого привода повышается за счет увеличения срока межремонтного использования рулевого привода на 10-15%. Формула изобретения Авторулевой по авт.св. № 540258, отличающийся тем, что, d целью повышения точности и надежности работы авторулевого, он содержит переключатель, блок сравнения, датчик нагрузки рулевого привода и задатчик нагрузки рулевого привода, выход которого подключен к первому входу блока сравнения, ко второму входу которого подключен датчик нагрузки рулевого привода, а выход блока сравнения через переключатель сое/шнен с другим входом фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1983 |
|
SU1183944A2 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| Авторулевой | 1987 |
|
SU1529181A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| Авторулевой | 1975 |
|
SU540258A1 |
| Устройство для перестройки параметров авторулевого | 1974 |
|
SU528546A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| Устройство для управления курсом судна | 1984 |
|
SU1227546A1 |
| АППАРАТУРА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ ВОЛНЕНИИ | 2009 |
|
RU2392181C1 |