(54) УСТРОЙСТВО ДЛЯ ПЕРЕСТРОЙКИ ПАРАМЕТРОВ АВТОРУЛЕВОГО
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перестройки параметров авторулевого | 1974 |
|
SU528546A1 |
| Устройство для управления движением судна | 1983 |
|
SU1150155A1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| Авторулевой | 1977 |
|
SU656028A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| Авторулевой | 1983 |
|
SU1183944A2 |
Изобретение относится к судовождению и может быть испояьзовано для авт матической перестройки параметров авторулевого морских судов. известен авторулевой, в котором осуществляется ручная перестройка кру тизны сигнала рассогласования по курсу и угловой скорости курса, содержащий датчики рассогласобания курса и угловой скорости курса, датчики угла перекладки руля, сигналы, с которых .поступают на суммирующий усилитель через регулируемые сопротивления, устанавливаемые рулевым D1 Однако такие устройства не эффективны при изменении динамических свойств объекта управления и условий плавания.. Наиболее близким техническим peineнием к изобретению является устройство для перестройки параметров авторулевого, содержащее последовательно соединенные задатчик, счетчик времени блок памяти, первый умножитель и суммирующий усилитель, второй вход которого связан с выходом второго умножителя, подключенного первым входом ко второму выходу блока памяти, а вторь1м входом - к выходу датчика рассогласования курса, выход датчика угловой скорости соединен со вторым входом первого умножителя, а выход задатчика связан е третьим входом суммирующего усилителя. Перестройка параметров этого авторулевого осущест,вляется в зависимости от времени, требуемого для достижения угловой скоростью некоторой заданной величины. Коэффициент крутизны сигнала рассогласования по курсу устанавливается прямо пропорционально этому времени. Вследствие нелинейности системы судно-авторулевой прямо пропорциональная связь между коэффициеьггом крутизны сигнала рассогласования по курсу и временем достижения угловой скоростью наперед задан- . ной величины отсутствует, что уменьшает точность при перестройке параметров и снижает быстродействие отработки управляющих воздействий fz.
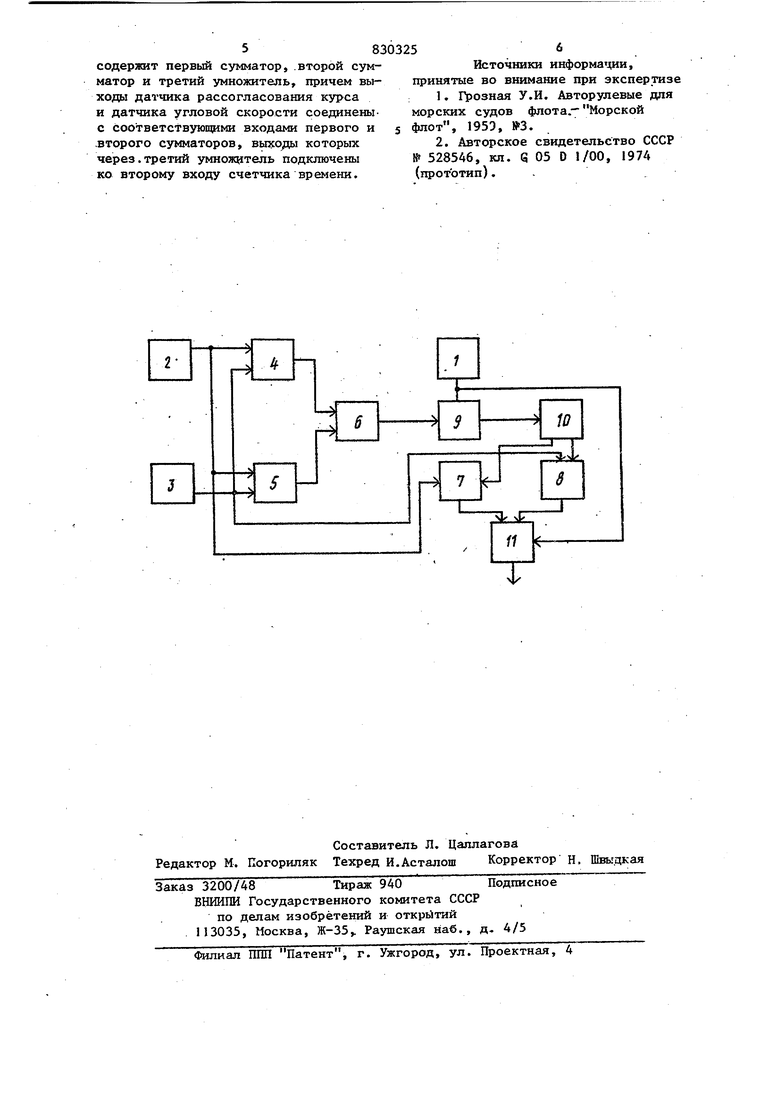
Недостатком этого авторулевого является низкое быстродействие и невысокая точность при перенастройке пара метров авторулевого в зависимости от изменения условий плавания. Цель изобретения - повьшение точности устройства, за счет чего повышается точность перенастройки параме ров авторулевого, а следовательно, и точность стабилизации курса, и бистр действие отработки управляющих воздействий. Поставленная цель достигается тем что в устройство дополнительно введень1 первый сумматор, второй сумматор и третий умножитель, причем выхода датчика рассогласования курса и датч ка угловой скорости соединены с соответствующими входами первого и вто рого сумматоров, выходы которых чере третий умножитель подключены ко второму входу счетчика времени. На чертеже представлена функциональ ная схема устройства для перестройки параметров авторулевого. Устройство содерясит задатчик .пробных сигналов, датчик 2 рассогласования курса, датчик 3 углово скорости, сзмматоры 4 и 5, умнозштелитретий 6, второй 7 и первый 8, счетчик 9 времени, блок .10 памяти, сумми руилщ1Й усилитель 11. Принцип действия предлагаемого устройства основан на том, что в качестве, характеристики, определяющей выбор крутизны сигнала рассогласования по курсу, и- по производной курса, является пребывания изображаю54 ей точки cKCT&i- i t в секторе (,еНёЧ/} о. (-). Каждому значению t соответствуют свои зЯачения крутизнь сигнала рассогласования по курсу и угловой скоросчи курса. Устройство для перестройки параметров работает следующим образом. С помощью задатчика 1 пробных сиг налов производят отклонение руля суд на (в устройстве предлагается прово дить перекладку руля по курсу с максимальной скоростью). При изменении курса появляется сигнал g на выходе датчика 2 рассогласования курса. В процессе перекладки руля происходит постепенное нарастание угловой ско830 254
рости судна ё Сигналы с выходов датчика 2 рассогласования и датчика 3 угловой скорости поступают на сумматоры. 4 и 5, на выходе которых получаются сигналы g-fcjt, g и . соответственно. С выходов сумматоров 4,5 сигналы поступают на умножитель 6, на выходе которого образуется сигнал(б+ oQ,€-)- (.) . Этот сигнал и сигнал с задатчика 1 пробных сигналовпоступают на входы счетчика 9 времени, на выходе которого генерируется сигнал, пропорциональный времени, в течение которого выполняется (l). В зависимости от значения этого времени из блока 10 памяти на умножители 7 и 8 поступают различные пары значений коэффициента крутизны сигнала рассогласования по курсу К. и коэффициента крутизны сигнала угловой скорости К. На выходе умножителей 7,8 формируются сигналы и IC2&,которые через суммирующий усилитель 1I поступают на рулевой привод. Введение в схему устройства для перестройки параметров авторулевого контура настроечного сектора позволяет определить скорость протекания переходного процесса перекладки курса, а тем самым оценить динамические свойства судна с тем, чтобы установить «-оптимальные по быстродействию коэффициенты К . и К . Использование изобретения значительно ум-зньшает дисперсию внешних возмущений, приходящихся на вход рулевого привода, что увеличивает срок службы рулевого привода и э44 ективность автоматичес-. кой стабилизации курса судна. Формула изобретения Устройство для перестройки параметров авторулевого, содержащее последовательно соединенные задатчик, счетчик времени, блок памяти, первый умножитель и суммирующий усилитель, второй вход которого связан с выходом второго умножителя, подключенного первым входом ко второму выходу блока памяти, а вторым входом - к выходу датчика рассогласования курса, выход датчика угловой скорости соединен со вторым входом первого умножителя, а выход задатчика связан с третьим входом суммирующего усилителя, отличающееся тем, что с целью повышения точности устройства, оно 58 содержит первый сумматор, .второй сумматор и третий умножитель, причем выходы датчика рассогласования курса и датчика угловой скорости соединеныс соответствующими входами первого и .второго сумматоров, выходы которых через.третий умножитель подключены ко второму входу счетчика времени. 5 Источники информации, принятые во внимание при экспертизе 1,Грозная У.И. Авторулевые для морских судов флота.- Морской флот, 195Э, №3. 2.Авторское свидетельство СССР № 528546, кл. g 05 D 1/00, 1974 (протЪтип).
