1
Изобретение относится к манипуляторам для промышленного применения, предназначенным для работы в автоматическом цикле, в частности в автоматических линиях.
Известен автоматический манипулятор, выполненный в виде неподвижного основания руки, закрепленной на вертикальной колонне которая может поворачиваться на фиксируемый угол с помощью механизма поворота и перемещаться в вертикальном направлении с помощью механизма подъема, выполненного в виде двух пневмоцилиндров одностороннего действия, поршневые полости которых заполнены маслом и соединены между собой через масляный бак с помощью дросселя, регулирующего скорость перемещения вертикальной колонны, являющейся штоком одного из пневмоцилиндров.
Однако этот манипулятор имеет значитель ные габариты и вес в связи с тем, что в устройстве подъема необходимо наличие двух цилиндров и масляного бака.
Целью изобретения является уменьшение габаритов и веса манипулятора.
Это достигается тем, что эука закреплен на полом штоке пневмопнлир1дра подъема. Полость штока выполпепа в виде корпуса гидроцилиндра, шток которого, выведенный через отверстие в поршне гидроцилиняра, закреплен ка корпусе механизма подъема, причем в закрепленном штоке расположена рейка, а в поршне гидроцилиндра - шестерня, с дросселем, взаимодействующая с этой рейкой.
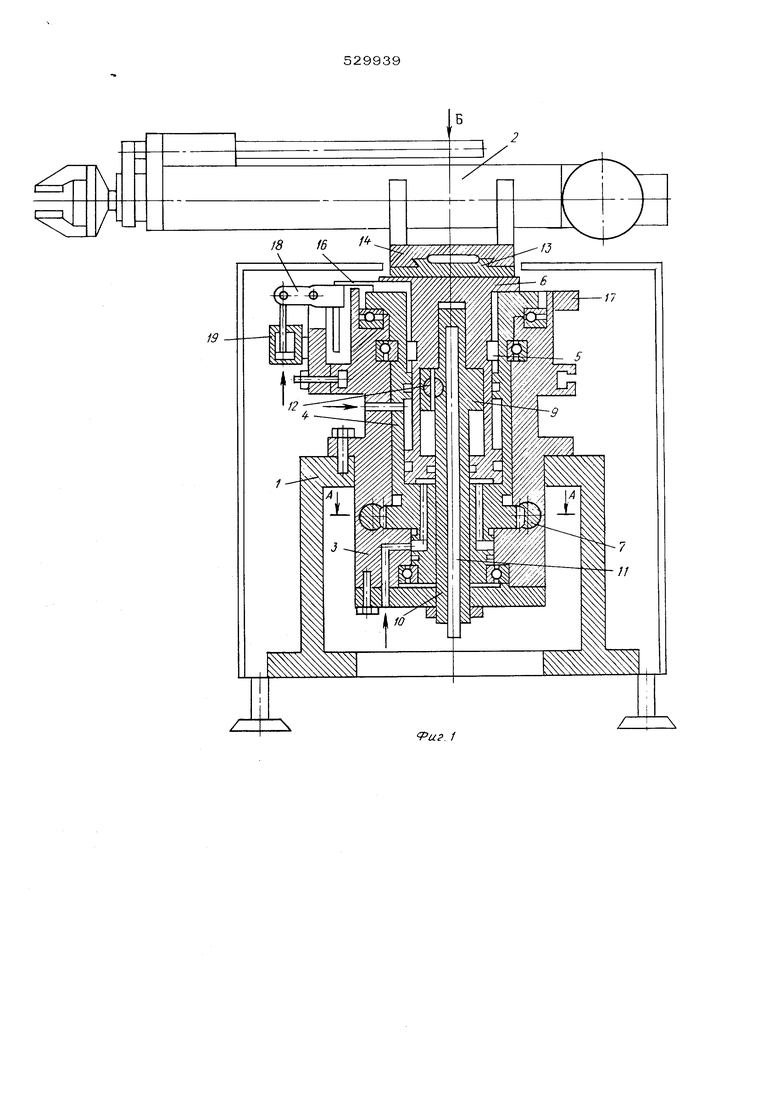
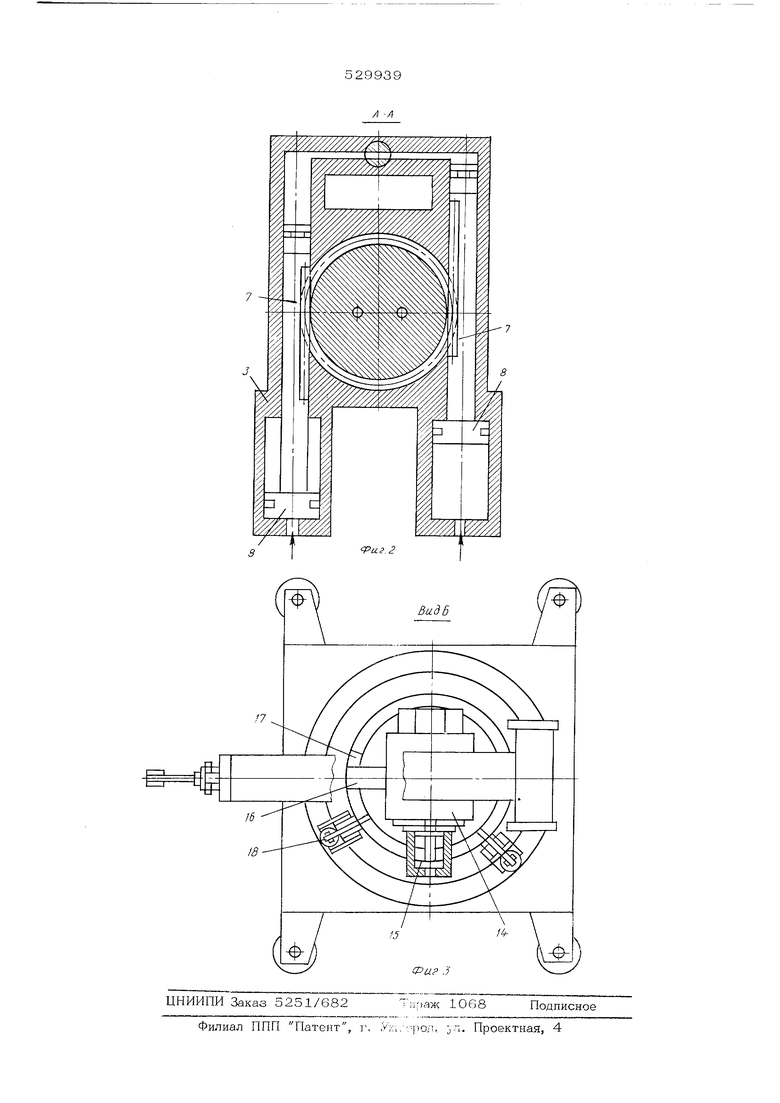
На фиг. 1 изображен предлагаемъш манипулятор с механизмом подъема; на фиг. 2сечение по А-А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 1.
Манипулятор содержит основание 1 и подвижную относительно основания руку 2, неподвижный корпус 3, в подшипниках которого устано&лен пневмоцилиндр подъема 4, соединенный шпонками 5 с полым штоком 6, приводные рейки 7 с поршнями 8. Внутри щтока 6 имеется полость гидроцилиндра с порщнем 9 и штоком 10, соединенным с корпусом 3. Внутри поршня 9 со штоком 10 расположена рейка 11, находящаяся в зацеплении с дросселирующей шестерней 12
На полом штоке 6 закреплены направляющие 13 с подвижной кареткой 14, имеющей привод 15. На каретке 14 закреплена рука 2. К щтоку 6 крепится упор 16, а на неподвижном корпусе 3 расположены не- подвижные упоры 17 и откидывающиеся упоры 18 с приводом 19.
Манипулятор работает следующим образом.
Вертикальное гтеремещение осуществляется подачей воздуха по каналам в корпусе 3 в соответствующую полость пневмоцилинд- ра подъема 4. При перемещении полого щто- ка 6 масло, находящееся внутри него, перетекает через отверстия в порщне 9 и в дросселирующей щестерне 12. Скорость подъема регулируется перемещением рейки 11 внутри щтока 10 и поворотом взаимодействующей с ней дросселирующей щестерни 12, которая перекрывает отверстие в поршне 9.
Поворот вокруг вертикальной оси осуществляется подачей воздуха под поршни 8 приводных реек 7, передающих крутящий момент на пневмоцилиндр подъема 4 и через
щпонки 5 и полый щток 6 на механизм поперечного смещения
Угол поворота ограничивается упорами 17 и откидывающимися упорами 18, срабатывающими от программы.
Поперечное смещение осуществляется подачей воздуха на привод 15 подвижной каретки 14, которая перемещается по направляющим 13 с рукой 2.
Все эти движения могут производиться одновременно в зависимости от программы.
Формула изобретения
Манипулятор с механизмом подъема, содержащим корпус и цилиндр с полым штоком отличающийся тем, что, с целью уменьшения габаритов и веса, полость штока выполнена в виде корпуса гидроцилиндра, шток которого; выведенный через отверстие в поршне гидроцилиндра, закреплен на корпусе механизма подъема, причем в закрепленном штоке расположена рейка, а в поршне гидроцилиндра - шестерня с дросселем, взаимодействуюшая с этой рейкой.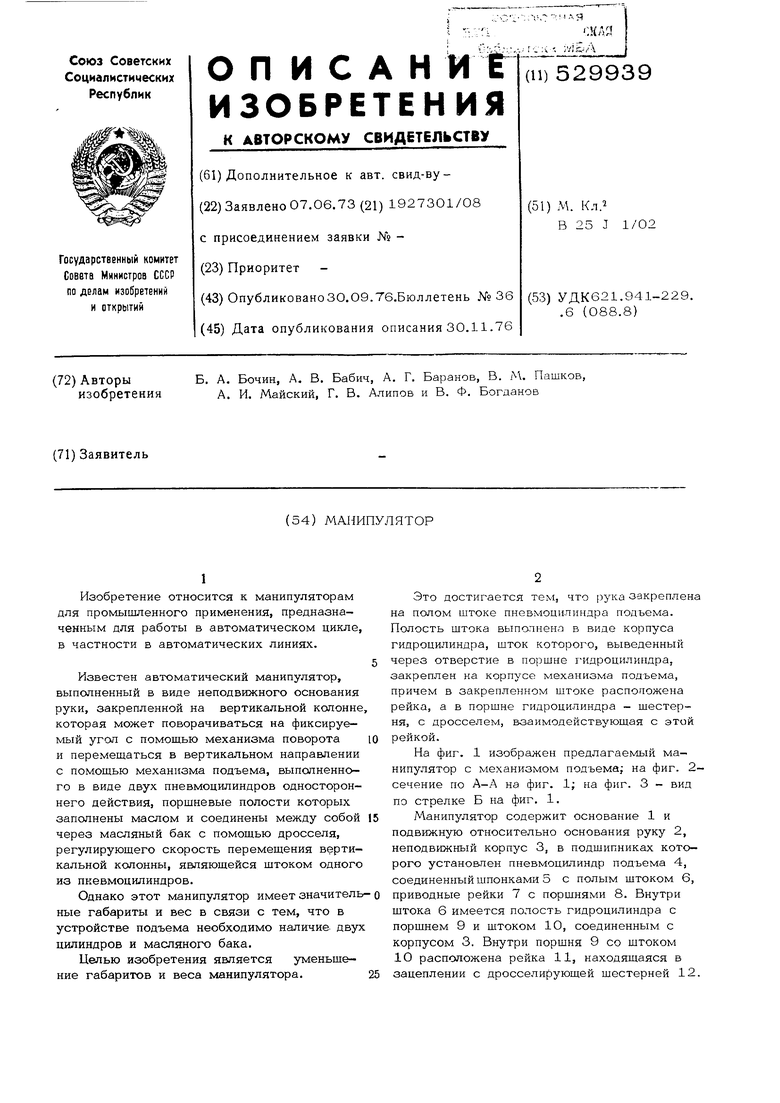
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1981 |
|
SU1042992A1 |
| Манипулятор | 1980 |
|
SU872251A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Манипулятор | 1980 |
|
SU908588A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Каретка кривовязюка к устройству дляВыРубКи зАгОТОВОК из пОлОСОВОгОМАТЕРиАлА | 1979 |
|
SU841732A1 |
| МЕХАНИЗМ ПОВОРОТА КОЛОННЫ СТРЕЛОВОГО МАНИПУЛЯТОРА | 2011 |
|
RU2479481C1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для управления реверсивным исполнительным механизмом | 1982 |
|
SU1084444A1 |