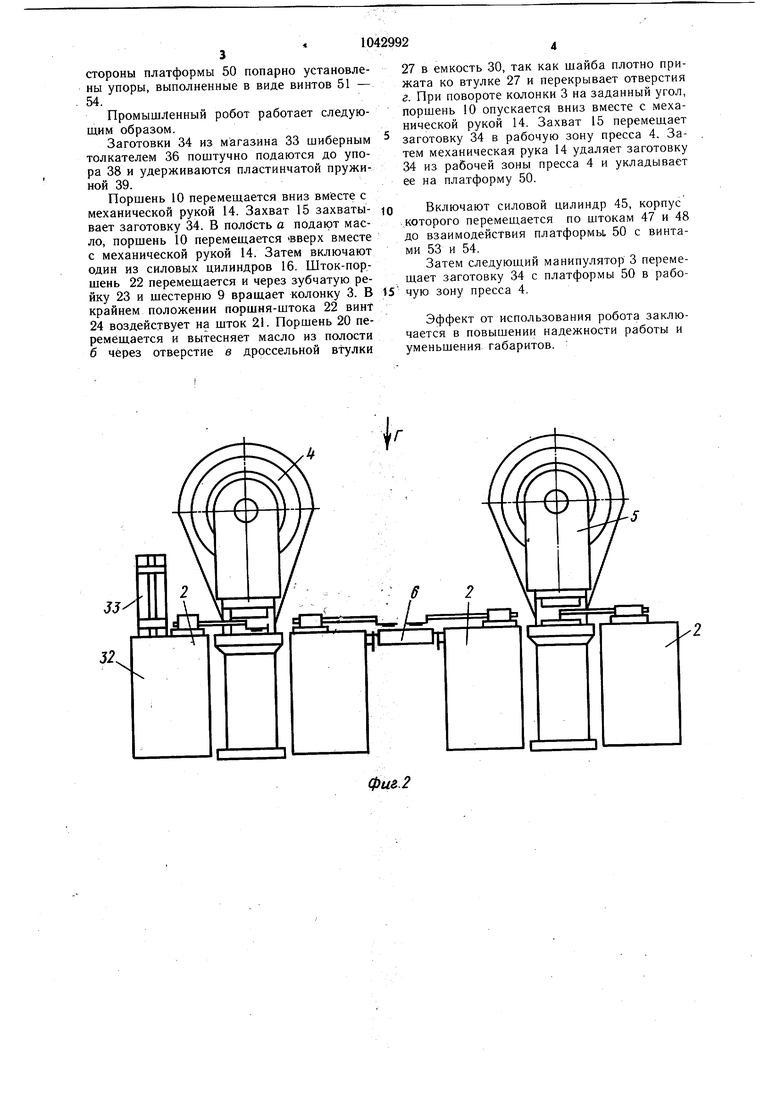
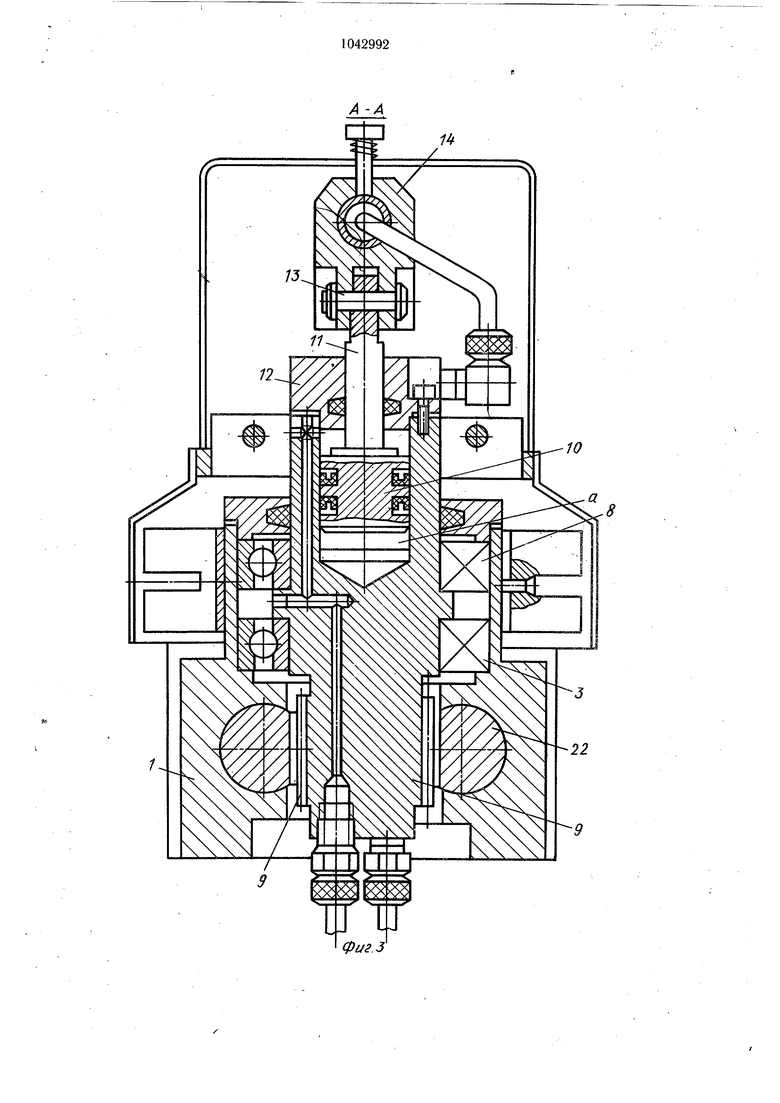
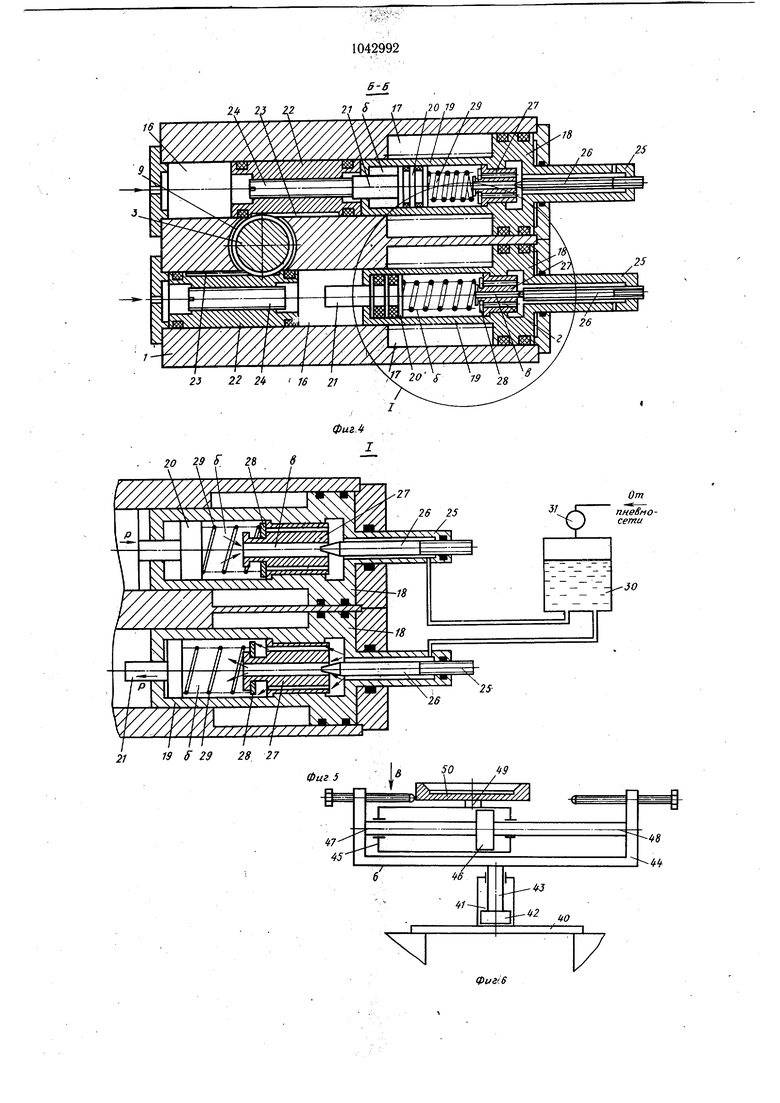
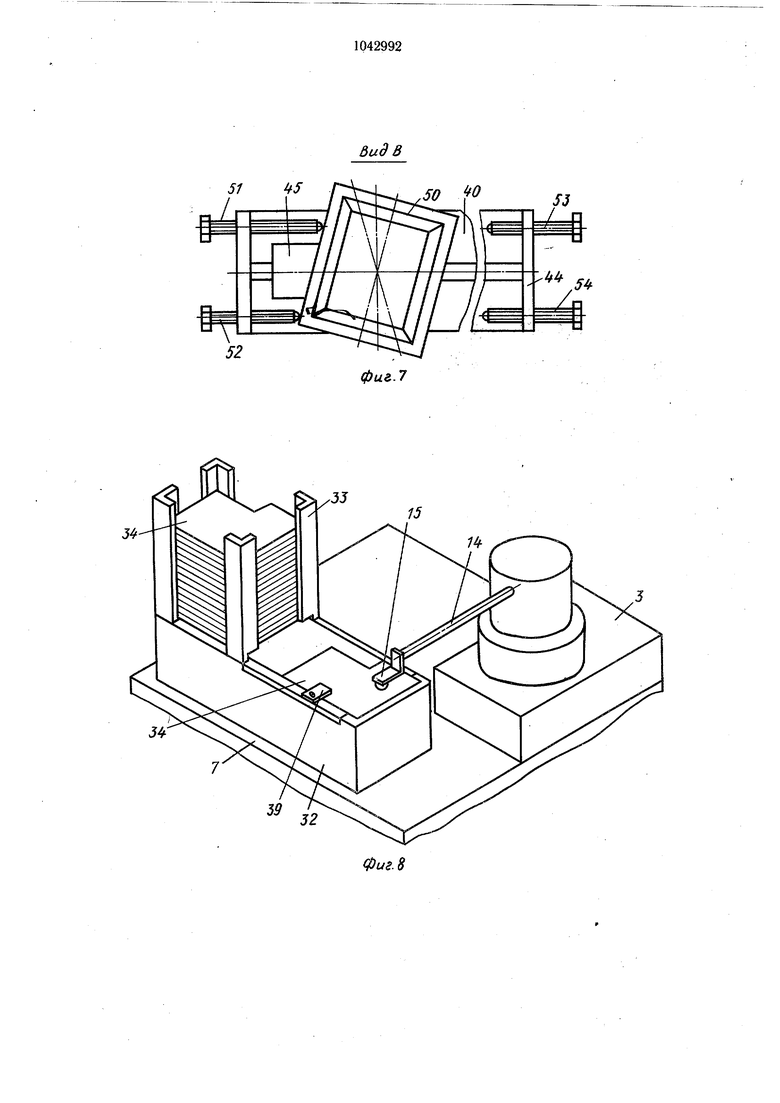
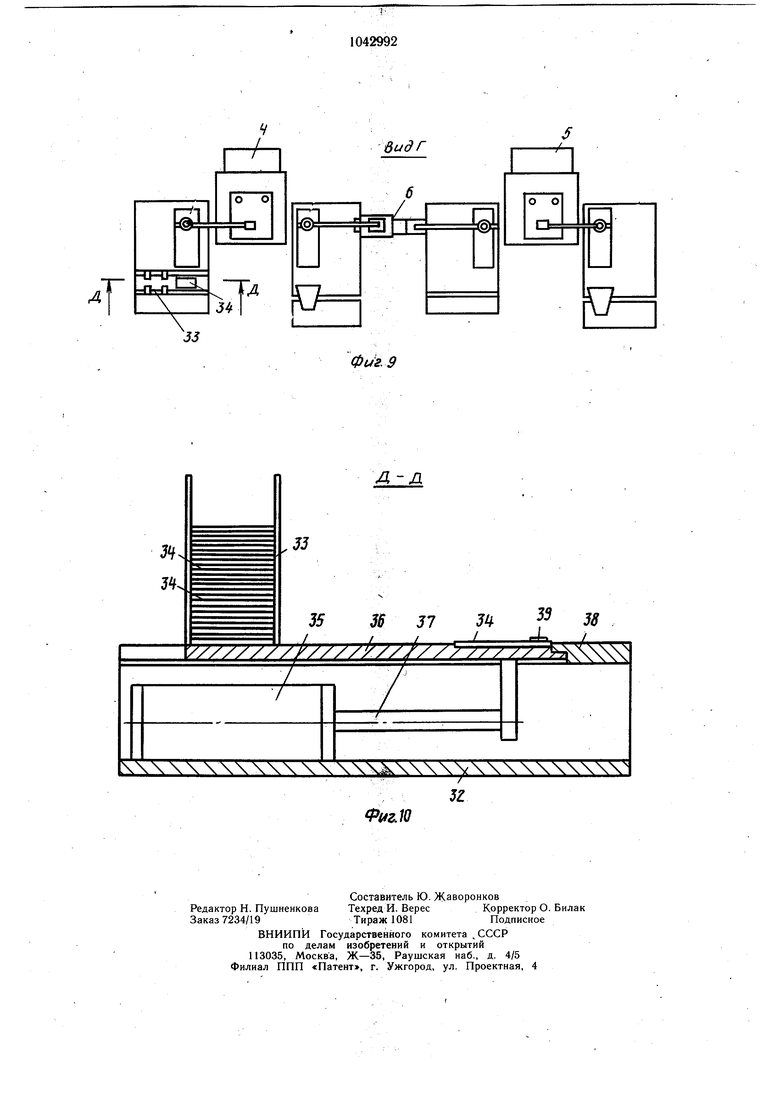
Изобретение относится к автоматизации процессов листовой штамповки и может быть использовано для подачи листовых заготовок к листоштамповочным прессам. Наиболее близким к изобретению по технической сущности и достигаемому эффекту является промышленный робот, содержащий основание, на котором смонтирована вертикальна,я поворотная колонка, несущая механическую руку и снабженная механизмом поворота с расположенными по обе стороны колонок силовыми цилиндрами, на шток-порщнях которых выполнены зубчатые рейки, входящие в зацепление с шестерней, закрепленной на колонке, с силовыми цилиндрами, связанными с пневмосистемой и имеющими порщни, несущие каждый по два штока, и снабженная также механизмом торможения поворота, связанным с гидросистемой и имеющая регулируемые упоры 1. Недостатком известного робота является низкая надежность работы. Целью изобретения является повышение надежности работы. Поставленная цель достигается тем, что в промышленном роботе, содержащем основание, на котором смонтирована вертикальная поворотная колонка, несущая механическую руку и снабженная механизмом поворота с расположенными по обе стороны колонки силовыми цилиндрами, на щтокпоршнях которых выполнены зубчатые рейки, входящая в зацепление с ними шестерня, закрепленная на колонке, с силовыми цилиндрами, связанными с пневмосистемой и имеющими порщни, несущие каждый по два штока, а также снабженная механизмами торможения поворота, связанными с гидросистемой и имеющими регулируемые упоры, штоки выполнены полыми, механизмы торможе}1ия размещены в полостях штоков и каждый из них выполнен в виде установленных в полости одного из щтоков, расположенного со стороны ujTOK-порщня, дополнительного поршня с дополнительным штоком, дроссельной втулки, закрепленной в поршне и имеющей центральное и периферийные отверстия, связывающие полости штоков, шайбы, взаимодействующей с торцом втулки со. стороны дополнительного поршня, пружины, расположенной между дополнительным поршнем и шайбой, и смонтированной в полости другого штока дроссельной иглы, входящей в центральное отверстие втулки, а упоры выполнены в виде винтов и ввернуты в шток-поршни с возможностью взаимодействия с дополнительными штоками. При этом полости штоков, в которых смонтированы дроссельные иглы, связаны с гидросистемой. На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - линия, общий вид ; на фиг. 3 - разрез А-А на фиг. I; на фиг. 4 -- разрез Б-Б на фиг. 1;на фиг. 5 - узел I на фиг. 4; на фиг. 6 - механизм ориентации; на фиг. 7 - вид В на фиг. 6; на фиг. 8 - механизм загрузки; на фиг. 9 - вид Г на фиг. 2; на фиг. 10 - разрез Д-Д на фиг. 9. Промышленный робот содержит основание 1, смонтированные на нем корпус 2 и вертикально поворотнуд) телескопическую колонку 3, и может использоваться в линии, содержащей прессы 4 и 5, механизм 6 ориентации, механизм 7 загрузки. Колонка 3 установлена в корпусе 2 при помощи подшипников 8 и на ней закреплена шестерня 9. В колонке 3 имеется цилиндрическая полость а, вкоторой установлен поршень 10, несущий шток 11. Полость а закрыта крьшкой 12, имеющей отверстие для прохода щтока 11. На штоке 11 при помощи оси 13 шарнир- но закреплена механическая рука 14, несущая захват 15. В корпусе 2 соосно установлены (или выполнены в нем) горизонтальные и соосно силовые цилиндры 16 и 17. В корпусах силовых цилиндров 17 установлены поршни 18 со штоками 19, имеющими цилиндрические полости б. В полостях б установлен поршни 20 со штоками 21. В корпусах силовых цилиндров 16 установлены штоки-поршни 22,-на которых выполнены (или закреплены) зубчатые рейки 23, входящие в зацепление с шестерней 9. В поршнях-штоках 22 установлены регулируемые упоры, выполненные в виде винтов 24, взаимодействующих со штоками 21. Порщни 18 снабжены также штоками 25, в которых установлены дроссельные иглы 26. В поршнях 18 смонтированы дроссельные втулки 27 с отверстиями в к г, несущие шайбы 28. В полостях б между поршнями 20 и шайбами 28 размещены пружины 29 и жидкость (масло). Полости б связаны с емкостью 30 для размещения рабочей среды-масла. Емкость через регулятор давления 31 связана с пневмосистемой (не показана). У пресса 4 установлен механизм загрузки, содержащий основание 32, на котором смонтирован магазин 33 для размещения ctonbi плоских заготовок 34, силовой цилиндр 35, шиберный толкатель 36, связанный со щтоком 37 силового цилиндра 35, упор 38 и пластинчатые пружины 39. Механизм 6 ориентации содержит основание 40, установленный на нем вертика льно силовой цилиндр 41 с поршнем 42 и щтоком 43, закрепленный на штоке 43 корпус 44. В корпусе 44 установлен горизонтально силовой цилиндр 45, имеющий поршень 46 с двумя штоками 47 и 48. Штоки 47 и 48 жестко связаны с корпусом 44. На корпусе силового цилиндра 45 щарнирно закреплена при помощи оси 49 платформа 50 для размещения заготовок 34. По обе
стороны платформы 50 попарно установлены упоры, выполненные в виде винтов 51 - 54.
Промышленный робот работает следующим образом.
Заготовки 34 из магазина 33 шиберным толкателем 36 поштучно подаются до упора 38 и удерживаются пластинчатой пружиной 39.
Поршень 10 перемеш,ается вниз вместе с механической рукой 14. Захват 15 захватывает заготовку 34. В пoлdcть а подают масло, поршень 10 перемещается вверх вместе с механической рукой 14. Затем включают один из силовых цилиндров 16. Шток-порщень 22 перемещается и через зубчатую рейку 23 и шестерню 9 вращает колонку 3. В крайнем положении поршня-штока 22 винт 24 воздействует на шток 21. Поршень 20 перемещается и вытесняет масло из полости б через отверстие в дроссельной втулки
27 в емкость 30, так как шайба плотно прижата ко втулке 27 и перекрывает отверстия г. При повороте колонки 3 на заданный угол, поршень 10 опускается вниз вместе с механической рукой 14. Захват 15 перемещает заготовку 34 в рабочую зону пресса 4, Затем механическая рука 14 удаляет заготовку 34 из рабочей зоны пресса 4 и укладывает ее на платформу 50.
Включают силовой цилиндр 45, корпус которого перемещается по штокам 47 и 48 до взаимодействия платформы 50 с винтами 53 и 54.
Затем следующий манипулятор 3 перемешает заготовку 34 с платформы 50 в рабочую зону пресса 4.
Эффект от использования робота заключается в повышении надежности работы и уменьшения габаритов. 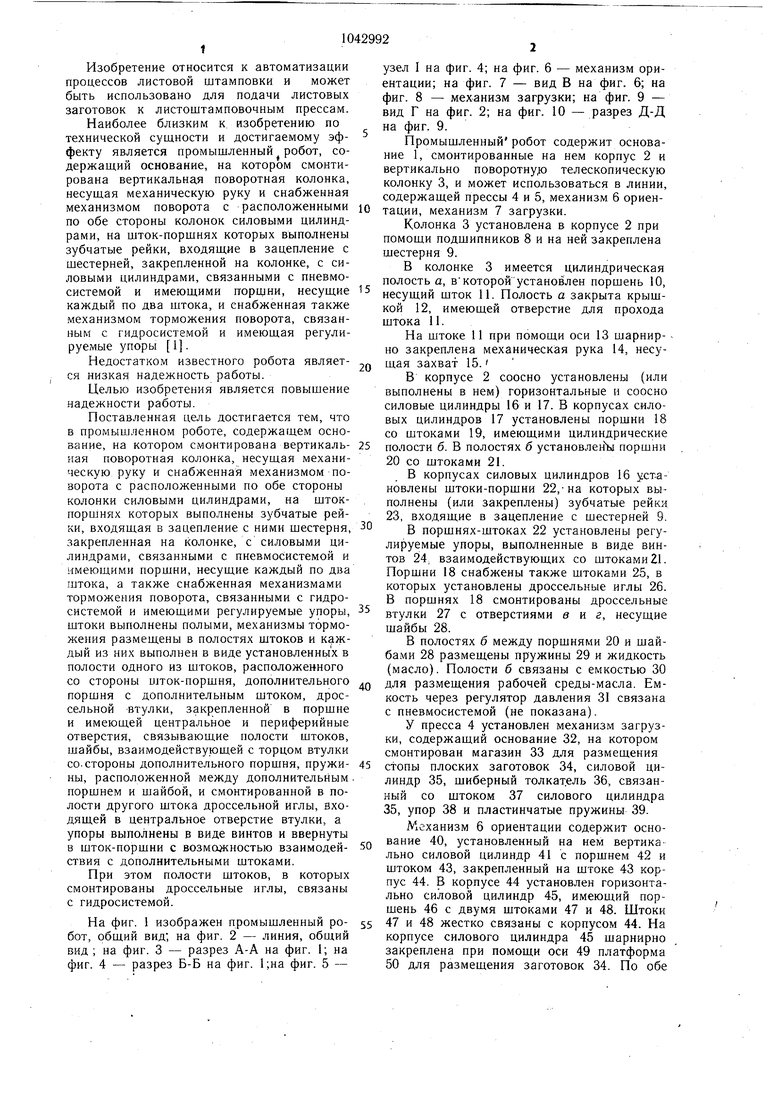
| название | год | авторы | номер документа |
|---|---|---|---|
| Токарный автомат | 1978 |
|
SU768570A1 |
| Линия для штамповки деталей из листового материала | 1985 |
|
SU1282946A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Устройство для подачи материала в рабочую зону пресса | 1982 |
|
SU1063513A2 |
| Устройство для подачи длинномерного материала в зону обработки | 1986 |
|
SU1342568A1 |
| Промышленный робот | 1976 |
|
SU607731A2 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| Устройство для перегрузки изделий | 1986 |
|
SU1346536A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Гидравлический демпфер | 1978 |
|
SU739279A1 |
1. ПРОМЫШЛЕННЫЙ РОБОТ, содержащий основание, на котором смонтирована с возможностью поворота вертикальная колонка, несущая механическую руку и снабженная механизмом поворота с расположенными по обе стороны колонки силовыми цилиндрами, на щток-порщнях которых выполнены зубчатые рейки, с входящей в зацепление с ними щестерней, закрепленной на колонке, с силовыми цилиндрами, связанными с пневмосистемой и имеющими порщни, несущие каждый по два щтока, а также снабженная механизмами торможения, связанными с гидросистемой и имеющими регулируемые упоры, отличающийся тем, что, с целью повыщения надежности работы и уменьщения габаритов, щтоки выполнены полыми,механизмы -торможения размещены в полостях щтоков и каждый из них выполнен в виде установленных в полости одного из щтоков, расположенного со стороны шток-порщня, дополнительного поршня с дополнительным штоком, дроссельной втулки, закрепленной в поршне и имеющей центральное и периферийные отверстия, связывающие полости щтоков, шайбы, взаимодействующей с торцом втулки со стороны дополнительного поршня, пружины, расположенной между дополнительным порШнем и шайбой, и смонтированной в полости другого штока дроссельной иглы, входящей в центральное отверстие втулки, а упоры выполнены в виде винтов и ввернуты в шток поршни с возможностью взаимодействия с дополнительными штоками. (Л 2. Промышленный робот по п. 1, отличающийся тем, что полости штоков, в которых смонтированы дроссельные иглы, связаны с гидросистемой. 4 СО со Ю 1
ч ч 23 22 2 16 21 У - f JL/L /i/ пнвбносети- - -
51 5
QudB
W
S3
0u&.7
,JJ
55 3S 37 ЗЦ- f 38
/////// // ////7//7/ //7/ Ч Х
Л-Л
(г -.
4-ZAi v 5Z /aW
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
