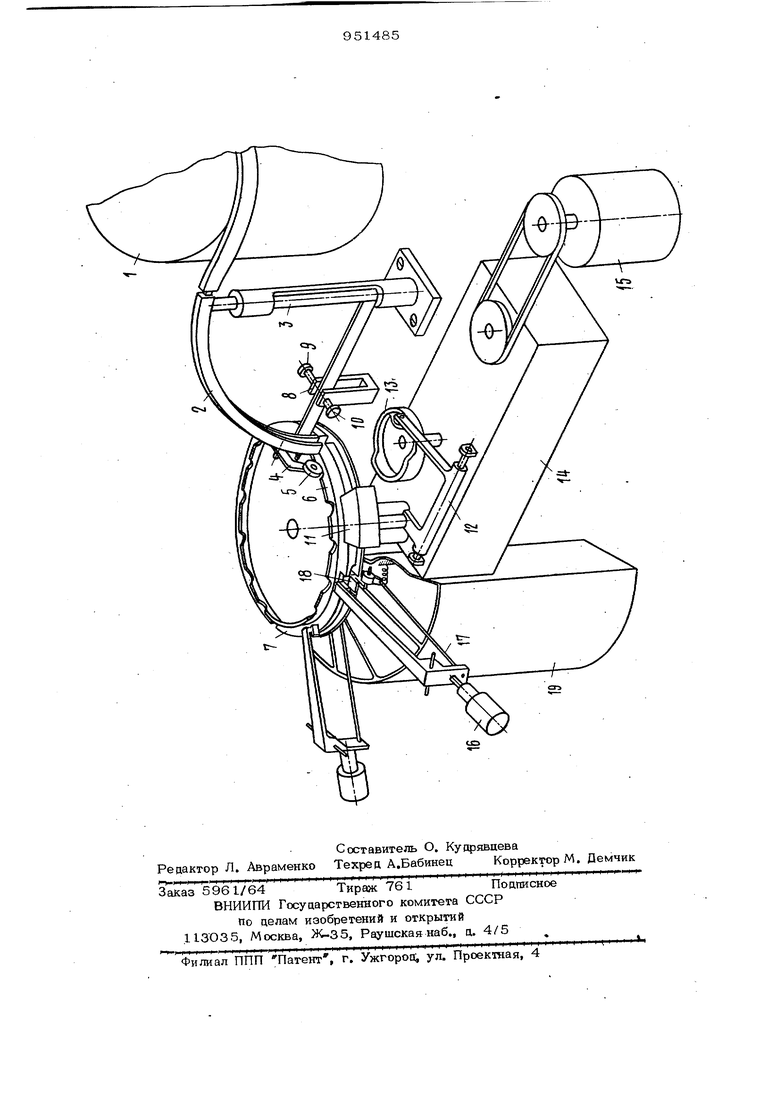
Изобретение относится к полупроводниковому машиностроению и может быть использовано в электронйой промышленности при контроле параметров полупршодниковых йриборов. Известны устройства Щ1я классификации полупроводниксеых приборов, содержащих вибробункер, загрузочный лоток, ротср с шаговым вращением, контактрую группу и измерительные блоки С J Нецостатком известных ;уч тррйст6 5ВЛяется жесткая фиксация загрузочных лотков, по которым приборы из вибро ункера напра вляются в гнезца ротора. При наличии жестко зафиксированного лотка трепетен повышенная точность шага ротора к жесткий aotiycK на габаритные размеры приборе, обеспечение которых требует большой труцоемкости, а разбрсх: габаритных раамерсв приводит к перекосу прибора при его движении в лотке и заклиниванию, что yxyivшает нааежность работы автомата, снижарет его производительность из-ёа вынужиевдых остановок автомата. Наиболее б/шзким к предлагаемому является автомат для классификации полупроводниковых приборов, содержащий виброQyvKsp, загрузочный лоток, транспортирвгюший ротор с гнездами для псиувроводаиковых приборов, кштактный мехвшам, мвхашсзм сортировки, лЬгичессий и измерительный блоки С2. О{щако этот автомат также недостаточно надежен в работе и обладает невысокой проиав одательностью. Цель изобретения - повышение надежн х:ти и производительности. Поставленная цель достигаетса тем, что в автомате для классификации попупроводдиковых приборш, содержащем вибробувкер, загрузочный лоток, травспортируюший ротор с гнездами для полупроводниковых приборсб, контактный механизм, мехе янзм сортировки, логический и взмеритвлный блоки, транспортирующий ротор сна&39Sжен профильным кольцом, кажаый паз которого размещен соогвегст)венно гнезпу транспоргируюшего ротора, а загрузочный лоток установлен на поворотной оси и сна бжен подпружиненным рычагом с роликом размещенным с возможностью взаимоцействия с каждым пазом профильного кольца транспортирующего ротора. На чертеже изображена схема автомата для классификации полупроводниковых приборов. Автомат для классификации полупров.од виковых приборов содержит вибробункер 1 загрузочный лоток 2., установленный на поворотной оси 3, укрепленного на кснце лотка подпружиненного рычага 4 с роликом 5, контактирующим с профильным кольцом б, аксиально закреп/юнным на тран спортирующем роторе 7, ограничительной скобы 8 с регулируемыми упорами 9 и 10, контактного механизма 11, рычаГа 12, торцового кулака 13, привода 14, электродвигателя 15. Разгрузочное устройство включает в себя э/юктромагнит 16, тягу 17 и откидывающую площадку 18. Магазин 19 имеет четырнадцать емкостей для рассортированных приборов. -Автомат работает слвсо ющим образом. Из вибробункера 1 срриентированные приборы поступают в загрузочный лоток 2. Лоток 2 закреплен на оси 3 и через ро,дак 5 подпружиненного рычага 4 находится в контакте с профильным кольцом 6, При совмещении лотка 2 с гнездом в .я.с роторе 7. подпружинеиный ролик о скатыtвается в паз кольца 6 и увлекает лоток k kасм9по(ГУ о ггао f кч тт trt TTQ Юсьи rrrHn oV 2 в направлении, противоположном движению ротора 7. Лоток под действием ине щиснных сил проскакивает устойчивое положение j и ролик накатьшается на противоположный подъем паза профильного кольца. Под действием пружины ролик возвращается в обратном направлении и увлекает за собой лоток и так до момента устойчивого положения ролика 5 в пазу профильного кольца 6, т.е. профильное кольцо своими пазами обеспечивает колебание, совмещение и фиксацию лотка относительно соответствующего гнезда ротора на позиции загрузки прибора. Колебание 54 легка усграняег закл1шизание приборов в канале логка и обеспечивает надежную за- грузку приборов в гнезда ротора, Загруженные в ротор 7 приборы на позкции замера заправляются в контактный механизм 11 и кулаком 13 через рычаг 12 зажимаются в ней. Затем осуществляется контроль надежности кситактирова- НИН, замер электрических параметров. Результаты измерения логический блок запоминает и, когда прибор будет находиться в зоне соответствующей емкости магазина 19, электрический сигнал логического блока будет подан на электромагнит 16, который через тягу 17 развернет откидываемую площадку 18 и прибор вьтадет из гнезда ротора 7, Предлагаемый автомат более надежен в работе и более производителен. Форм, ула изобретения. Автомат для классификации подупрово никовых приборов, содержащий вибробункер, загрузочный лоток, транспортирующий ротор с гнездами для полупроводниковых приборов, контактный мехадазм, механизм сортировки, логический и измерительный блоки, отличающийся тем, что, с целью повышения надежности и производительности, транспортирующий ротор снабжен профильным кольцом, каждый паз которого размещен соответсгвенно гнезду транспортирующего ротора а f загрузочный лоток установлен на поворотs ной оси и снабжен подпружиненным рычагом с роликом, размещенным с возможностью взаимодействия с каждым пазом профильного кольца транспортирующего ротора. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 5S7436, кл.Н OIL 21/66,04.03.75. 2. Авторское свидетельство СССР № 53481О, кл. Н OIL 21/66, 03.05.73.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки полупроводниковых приборов | 1981 |
|
SU983834A1 |
| Автомат для классификации полупроводниковых приборов | 1973 |
|
SU534810A1 |
| Автомат для контроля и сортировки герконов | 1990 |
|
SU1749941A1 |
| Классификатор полупроводниковых приборов | 1976 |
|
SU995160A1 |
| Автомат для разбраковки полупроводниковых приборов | 1975 |
|
SU561234A1 |
| УСТРОЙСТВО ДЛЯ УПАКОВКИ МЕЖДУ ЛЕНТАМИ ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ С ОДНОНАПРАВЛЕННЫМИ ВЫВОДАМИ, РАСПОЛОЖЕННЫМИ В ОДНОЙ ПЛОСКОСТИ | 1991 |
|
RU2028030C1 |
| АВТОМАТ ДЛЯ РАЗБРАКОВКИ ПОЛУПРОВОДНИКОВЫХ | 1973 |
|
SU390601A1 |
| Установка для сборки перед пайкой корпуса с выводами | 1982 |
|
SU1050824A1 |
| Устройство для контроля и сортировки полупроводниковых приборов с гибкими выводами | 1976 |
|
SU752838A1 |
| Автомат для сортировки изделий | 1980 |
|
SU895559A1 |