(54) МЕХАНИЗМ ПЕРЕНОСА ЗАГОТОВОК ПО ПОЗИЦИЯМ ХОЛОДНОВЫСАДОЧНОГО АВТОМАТА
12
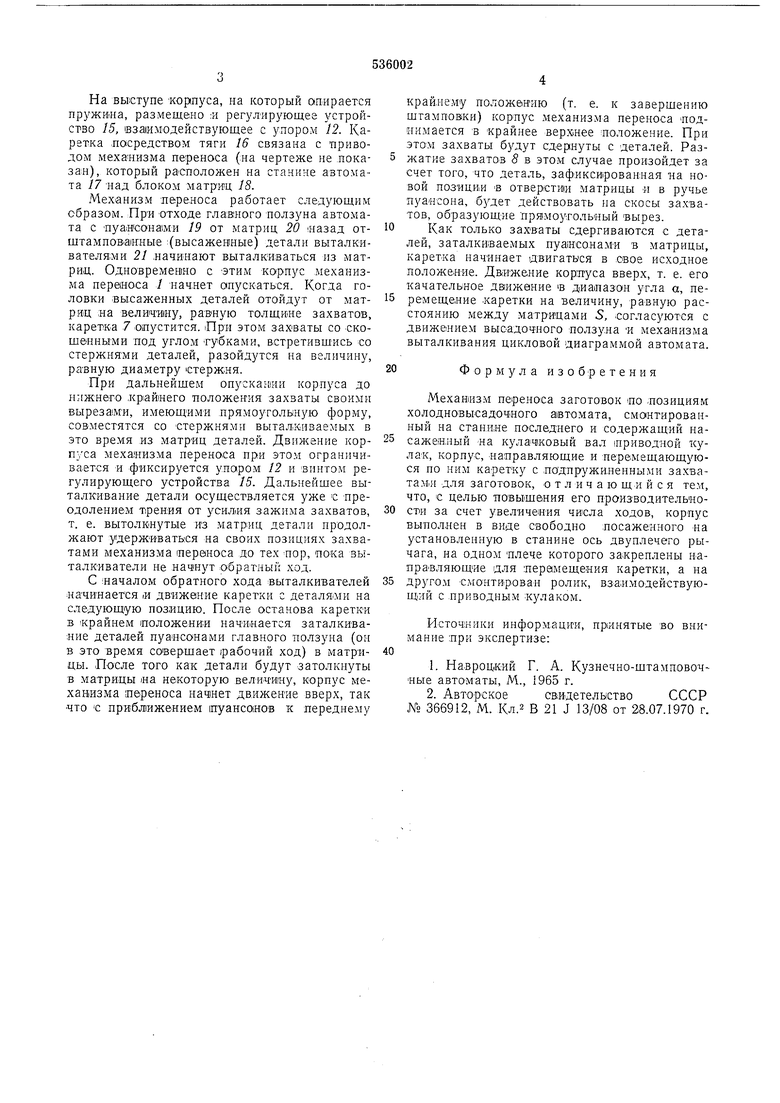
На выступе корпуса, на который опирается пружина, размещено ;и регулирующее устройство 15, взаимодействующее с упором 12. Каретка .посредством тяги 16 связана с приводом механизма переноса (на чертеже не .показан), который расположен на станине автомата 17 над блоком матрищ 18.
Механизм переноса работает следующим образом. Лри отходе гла;в ного ползуна автомата с пуамсона1ми 19 от матриц 20 назад отштамповранные (высажен1ные) детали выталкивателЕми 21 .начинают выталкиваться пз матриц. Одновременно с этим корпус механизма переноса / начнет опускаться. Когда головки высаженных деталей отойдут от матриц на величину, равную толщине захватов, каретка 7 опустится. При этом захваты со скошенными под углом губками, встретивщись со стержнями деталей, разойдутся на величину, равную диаметру стержня.
При дальнейшем опускании корпуса до нижнего .кр айнего положения захваты своими выреза мн, имеющими прямоугольную форму, совместятся со стержнями выталкиваемых в это время из матриц деталей. Двил :ение корпуса механизма переноса при этом ограничивается и фиксируется упором 12 и винтом регЗлирующего устройства 15. Дальнейщее выталкивание детали осуществляется уже с преодолением трения от усилия зажима захватов, т. е. вытолкнутые из матриц детали продолжают удерживаться на своих позициях захватами механизма переноса до тех нор, пока выталкиватели не начину т обратный ход.
С началом обратного хода выталкивателей начинается и движение каретки с деталял1и на следующую позицию. После останова каретки в Крайнем положении начинается заталкивание деталей пуансонами главного ползуна (он в это время совершает /рабочий ход) в матрИцы. После того как детали будут затолкнуты в матрицы на некоторую величи1ну, корпус механизма переноса движение вверх, так что с приближением inyancoiHOB к переднему
край.не.му положению (т. е. к завершению штампов1ки) корпус механизма переноса поднимается в крайнее верх;нее положение. При этом захваты будут сдернуты с деталей. Разжатие захватов 8 в это.м случае произойдет за счет того, что деталь, зафиксированная на новой позиции в отверстии матрицы и в ручье пуаисона, будет действовать на скосы захватов, образующие Цря1моугольный вырез.
Как только захваты сдергиваются с деталей, заталкиваемых пуаисонаМИ в матрицы, каретка начинает двигаться в свое исходное положение. Дв(Ижение корпуса вверх, т. е. его качательное движение в диапазон угла а, перемещение .каретки на величину, равную расстоянию между матрицами S, согласуются с движением выс-адочного ползуна и механизма выталкивания цикловой диаграммой автомата.
Формула изобретения
Механизм переноса заготовок по позициям холодновысадочного а1втомата, смонтированный на станине последнего и содержащий насаже1нный на кулач1ковый вал приводной кулаК, корпус, направляющие и перемещающуюся по ним каретку с подпружиненными захватам1И для заготовок, отличаю щи и с я тем, что, с целью повышения его производительност)и за счет увеличения числа ходов, корпус выполнен в виде свободно посаженного на установленную в станине ось двуплечего рычага, на одном плече которого закреплены направляющие для перемещения каретки, а на
другом Смонтирован ролик, взаимодействующ-нй с приводным кулаком.
Источники информацрги, принятые во внимание при экспертизе:
1.На.вроцкий Г. А. Кузнечно-щтамповочные автоматы, М., 1965 г.
2.Авторское свйдетелыство СССР № 366912, М. Кл.2 В 21 J 13/08 от 28.07.1970 г.
Фиг.1
536002
ВидА
Фиг г
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для высадки | 1972 |
|
SU471944A1 |
| Механизм переноса заготовок многопозиционных холодновысадочных автоматов | 1978 |
|
SU740374A1 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
| ЗОЮЗНАЯ \Ь;;,П:НТй^-|?ШМ?04(Ц 1^нЬЛуТЕНД- j | 1972 |
|
SU331839A1 |
| Устройство для изготовления осесимметричных полых ступенчатых деталей | 1990 |
|
SU1790463A3 |
| Холодновысадочный автомат | 1979 |
|
SU829293A1 |
| Холодновысадочный автомат | 1978 |
|
SU710740A1 |
| Бункерное захватно-ориентирующее устройство | 1977 |
|
SU772653A1 |
| МНОГОПОЗИЦИОННЫЙ ХОЛОДНО-ВЫСАДОЧНЫЙ АВТОМАТ | 1973 |
|
SU378278A1 |
| Устройство для высадки | 1981 |
|
SU996027A1 |


