(54) МЕХАНИЗМ ПЕРЕНОСА ЗАГОТОВОК МНОГОПОЗИШОННЫХ Изобретение относится к кузнечно- ipecсовому оборудованию и может быть испопь аовано для ггереноса заготовок между позициями высадочного автомата. Известен механизм переноса заготовок многопозиционных холодновысадочных автоматов, содержаший связанную с неподвижным корпусом каретку со .шпиндепямИ| несущими на нижних концах, захватные паль цы, и устройство для разв о1ёГа1ахватнья тюльцев Ш . Однако в этом механизме зазоры в пере редаче шестерня-рейка создают дополнитель teHbHHfl шум и влияют на точность разворота. Пружины возврата каретки создают динамический удар, который способствует микроколебанию захватов, что ведет к потерям захватными пальцами заготовок в процессе их переноса между позициями высадки. Цель изобретения.- повышение точности захвата заготовок, и снижение шУма при работе.,.
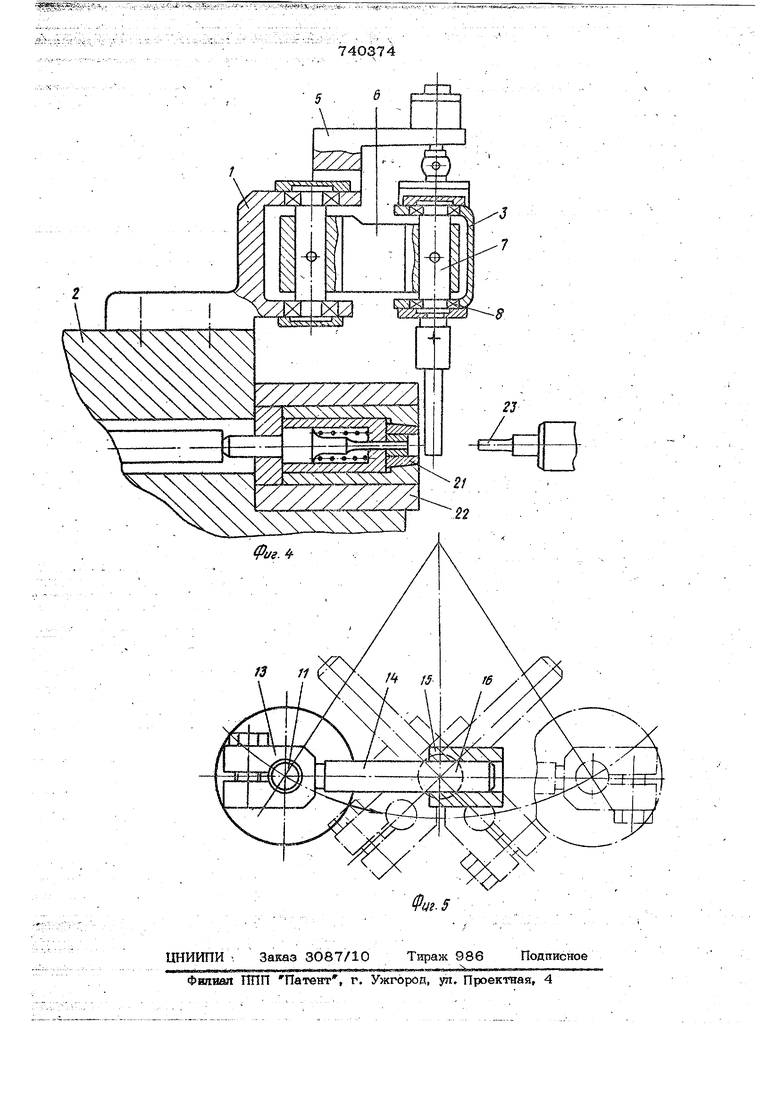
ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ . . 2 Эта цель достигается аа счет бго, устройство для разворота захватных пальцев выполнено в виде закрепленного- на неподвижном корпусе кронштейна и соответствующих по количеству шпивделям подшипника, укрепленного на кронштейне, ва-. лика, свободно вращающегося на подшипнике, смонтированной на валике втулки и ;вилки, охватывающей зубцами верхни.й шпинделя и заходяшей стержневой частью во втулку. На фиг. 1 изображен главный вид механизма переноса (схема относительного расположения шпинделя и устройства разворота захватных пальцев); на фйг. 2 - механизм переноса (схема расположения шарниров в исходном положении тяги и каретки); на фиг. 3 - схема качания каретки переноса на величину шага между высадочными позициями; на фиг. 4 - механизм переноса, разрез по шарнирам и матрице; .йа фиг, 5 - CKQMB движения шпинделя по дуге относительно валика, располо3 74 женного параллельно шпинделю, и постепенного поворота шпинделя на 18О, Механизм переноса содержит корпус 1, закрепленный на станййе 2 автомата, каретйу 3, соединенную с корпусом 1 с по liioDibio шарниров 4, и кронштейн 5, зак репленный на корпусе 1. Шарниры 4 состоят из рерьги 6, осей 7, сяэедйнёнйых с корпусом и кареткой под шипниками качения 8, С помощью тяги 9 каретка 3 соединена с. приводом (на рисунках не показан), сообщающим каретке качатеяьйое движение, В каретке 3 смонтврова1ад на подшилниках качения 1О шпиндели 11, кш ниж HiBX ковдах которых закреплены захватные пальцы 12, а на верхних - вилки 13, , Цилиндрический стержень 14 випкй 13 свободно входит во втулку ISt закрепленйую на валике 16, свободно вращающемся на подшипниках качения 17 в кронштейне 5, Если по технологии изготовления на какой-либо П031ЩИИ высадки 18 не тре(8ует-( са разворот (захватных, пальцев 12 то шпиндель 11 может быть закреплен на каретке 3 планкой 19 и стержнем 20, Захватнь1е пальцы 12 совершают дви- мсенйб между позициями высадки, состоя- шими из матриц-21, закрепленных в мат-, ричном блоке 22, и пуансонов 23, закрепленных в ползуне (не показан), Работйет м анизм следующим образом, В {кжодном положении захватные йащицы 12 расположены нротив высадочных позЕДИй 18 (фиг. 1), Механизм выталкивания (не показан) выталкивает заготовки на матрвд s захватные пальцы 12 Из поснедней позиции законченная обработкой заготовка выталквовайтся в лоток. 4 Привод переноса с помощью тяги 9 перемещает каретку 3 по дуге на величину шага между позициями (фиг, 3). При движении каретки 3 по дуге стержень 14, скользя по втулке 15, разворачивается вместе с ней. Происходит развод рот захватных пальцев 12 на 180 (фиг. 5). В ковще хода каретки пуансонами 23 заготовки заталкиваются в матрицы 21. При отходе ползуна автомата каретка 3 механизма переноса возвращается приводом в исходное положение с одновременным разворотом захватных пальцев в обратном направлении. Формула изобретения Механизм переноса заготовок многопо-. зийионных холоднЬвысадочных автоматов, содержащий связанную с неподвижным кор пусом каретку со шпинделями, несущими на нйж)щх кощах захватные пальцы, и устройство для разворота захватных пальцев, о т л и Ч а ю щ и и с я тем, что, с целью пе1БЫШвНйя точности захвата заготовок ji Сниженияшума при работе, устройство для разворота захватных пальцев выполнено в виде закрепленного на неподвижном корпусе кронштейна и соответствук шах йо количеству шпинделям подшипника, укрепленного на крошитейне, валика, свободно вращающегося на подшипнике, смонтврованной на валике втулки и вилки, охватывающей зубцами верхний конец шпи деля и заходящей стержневой частью во втулку. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР П 361009, кл, В 21 J 13/08, 1971. 740374 /7 W 15 rg УО
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разворота захватных пальцев | 1980 |
|
SU893384A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННЫХ ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ | 1973 |
|
SU366912A1 |
| Устройство к холодновысадочномуАВТОМАТу | 1978 |
|
SU801943A1 |
| Механизм отрезки заготовок | 1977 |
|
SU721240A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| Механизм отрезки заготовок | 1973 |
|
SU487704A1 |
| Холодновысадочный автомат для изготовления полупустотелых заклепок | 1989 |
|
SU1632599A1 |
| Многопозиционный холодновысадочный автомат | 1980 |
|
SU986565A1 |
| Автомат для двусторонней высадки утолщений на стержневых заготовках | 1983 |
|
SU1174144A1 |
| Механизм переноса заготовок многопозиционных высадочных автоматов | 1978 |
|
SU738742A1 |

S
z
-f
