Известны экскаваторы с шагающим ходом, производящим попеременное передвижение корпуса экскаватора и опорных башмаков. Это передвижение достигается тем, что приводная от мотора ось эксцентрично насажена на колесах, перекатывающихся по опорным рамкам, связанным с башмаками. Ходовые колеса снабжены пальцами, которые при качении колес перемещаются по прямолинейным кулисам, составляющим одно целое с рамками.
В таких механизмах шагающего хода в некоторый момент между рамками ходовыми колесами возникает трение скольжения, а вследствие того, что при передвижении корпуса вес машины передается через ходовые колеса на основание рамок, имеет место значительная потеря энергии на трение между колесами и рамками.
Это вызывает необходимость устанавливать сложные зубчатые передачи с большим передаточным числом для создания необходимого крутящего момента, способного преодолеть указанную силу трения, что влечет за собой уменьшение скорости передвижения экскаватора.
Кроме того, возникающее значительное трение между колесами и рамками способствует быстрому износу последних, что вызывает частую их смену.
Предлагаемая конструкция шагающего хода увеличивает скорость передвижения экскаватора при прочих равных условиях на 25-35%.
Сущность предложения заключается в том, что совершающий перемещение по вертикали палец заменен кулаком жестко связанным с осью, на которую свободно насажено колесо. Кулак может быть выполнен либо в виде круглой шайбы, либо в форме трехгранного диска с наружным очертанием равными по длине дугами одного и того же радиуса.
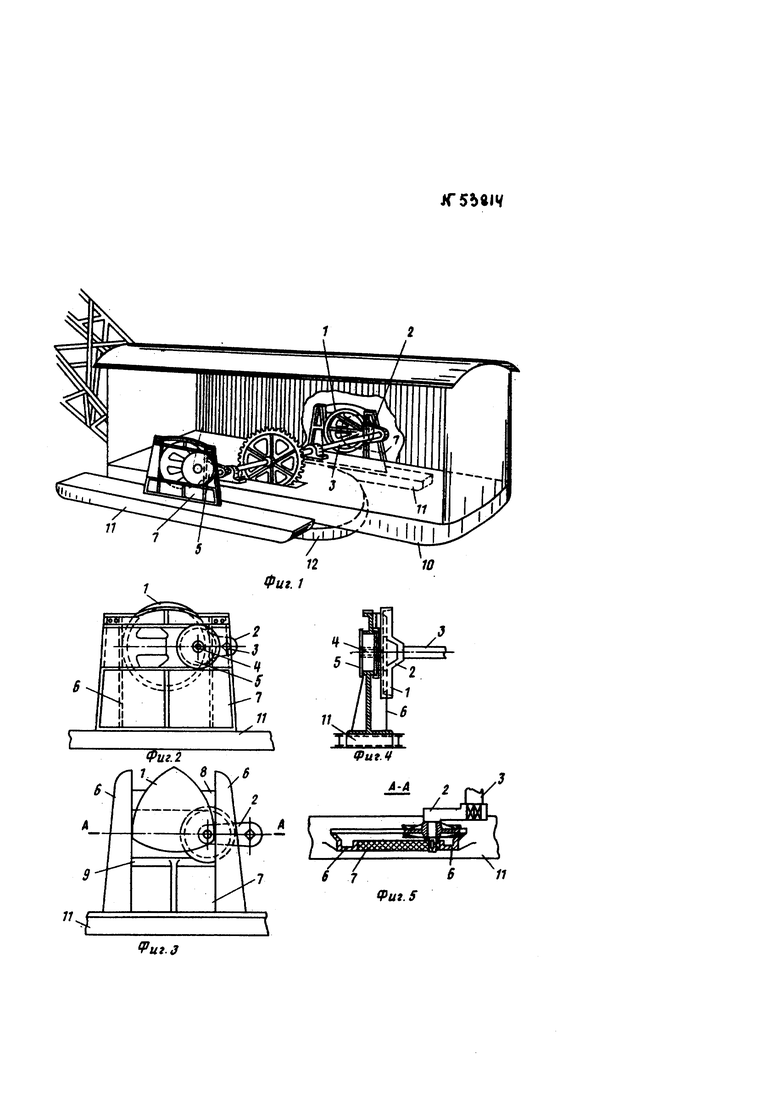
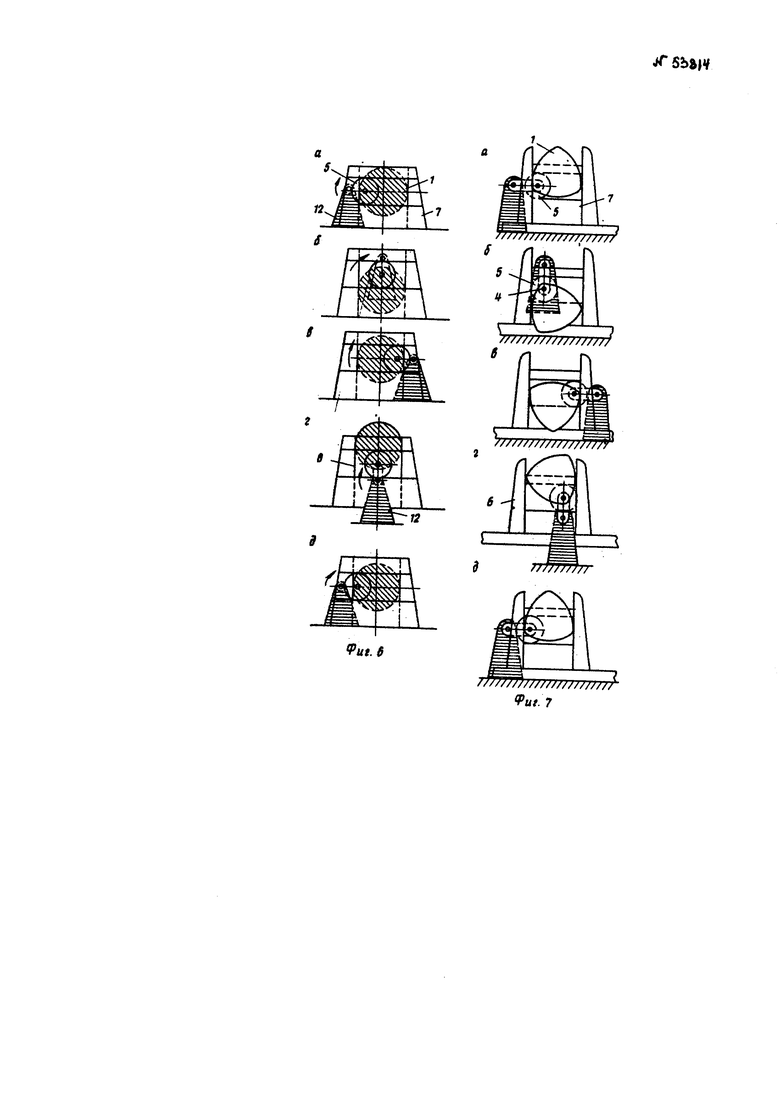
На фиг. 1 изображен экскаватор, перспективный вид; на фиг. 2 и 3 - предлагаемый механизм, вид сбоку (два варианта выполнения); на фиг. 4 - то же, вид сзади; на фиг. 5 - разрез по А-А на фиг. 3; на фиг. 6 и 7 - схемы различных наиболее характерных последовательных положений механизма.
Предлагаемый механизм включает круглый или трехгранный кулак 1 (см. фиг. 1, 2, 3) с наружными очертаниями граней равными дугами одного и того же диаметра. Кулак 1 жестко соединен с кривошипом 2 приводного вала 3 и снабжен эксцентрично укрепленной на нем осью 4, на которой свободно насажено ходовое колесо 5. Кулак также снабжен ребордами, ограничивали ими его движение вдоль вертикальных направляющих 6 рамки 7.
Ходовые колеса 5 могут перекатываться в горизонтальном прорезе ранки, ограниченном верхней ходовой поверхностью 8 и нижней поверхностью 9.
Приводной вал 3 установлен на корпусе 10 повозки и приводится во вращение посредством трансмиссии от двигателя.
Рамки 7 находятся по обеим сторонам платформы и соединены о башмаками 11, служащими для передачи веса корпуса повозки на грунт при его передвижении.
При рассмотрении действия механизма хода видно, что вращательное движение приводного вала будет трансформироваться при неподвижной рамке и подвижной корпусе (или неподвижном корпусе и свободной рамке) во вращательное движение кривошипа 2 и жестко с ним связанного кулака 1 относительно оси 4 колеса 5 и поступательное движение оси относительно рамки, совершаемое в горизонтальном прорезе ее и обусловленное эксцентричным расположением оси ходового колеса в кулаке 1 и принужденным движением этого кулака в вертикальных направляющих 6 рамки 7.
При неподвижной рамке и направлении вращения приводного вала согласно фиг. 6,а, 7,а, последний начнет приподниматься, описывая траекторию, обусловленную суммой двух движений: поворота кривошипа 2 относительно оси колес и поступательного перемещения последних в горизонтальном прорезе рамки.
При этом подъем приводного вала повлечет за собой и подъем связанного с ним корпуса и нижней опорной базы повозки, которая, приняв слега наклонное положение, будет скользят по грунту, касаясь его лишь своей задней кромкой.
Положение, показанное на фиг. 6,б, 7,б соответствует смещению корпуса, когда приводной вал, а с ним и корпус поднят на максимальную величину, равную расстоянию между осью вала 3 и осью 4 колеса 5.
В конце шага корпуса (фиг. 6,в) нижняя база машины вновь опущена на грунт. Величина горизонтального передвижения (шаг) равна удвоенному расстоянию от оси приводного вала до центра кулака 1.
Дальнейшее вращение приводного вала вызовет движение оси 4 колес по круговой траектории вверх и обусловленный этим подъем рамок 7 и связанных с ними башмаков 11 на величину, равную расстоянию между осью приводного вала 3 и осью 4 колес 5, при одновременном передвижении рамок вперед по отношению к корпусу 10 (фиг. 6.г, 7,г).
В конце цикла, соответствующего одному повороту приводного вала (фиг. 6.д, 7,д) рамки 7 с башмаками 11 вновь опущены на грунт и передвинуты вперед на величину шага. Колеса 5 находятся снова в левом крайнем изложении относительно рамок и механизм подготовлен для совершения дальнейшего передвижения корпуса повозки.
Изменение направления движения достигается поворотом корпуса 10 вокруг центральной оси нижней базы 12 обычным имеющимся поворотным механизмом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| ШАССИ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО РАЗЛИЧНЫМ ОПОРНЫМ ПОВЕРХНОСТЯМ С КОЛЕСНО-ШАГОВЫМИ ДВИЖИТЕЛЯМИ | 2015 |
|
RU2628285C2 |
| Шагающий механизм к самоходной повозке | 1955 |
|
SU112203A1 |
| I БИ&ЛИСГГЕНААвторыБ. И. Левин и П. К. Мороз | 1973 |
|
SU381599A1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| Приспособление для приведения в движение шагающей моторной повозки | 1928 |
|
SU15818A1 |
| Движитель транспортного средства | 1987 |
|
SU1483817A1 |
| Автопогрузчик для укладки в штабель и разборки из него различного рода штучных грузов | 1959 |
|
SU126413A1 |
| Колесно-шагающий движитель транспортного средства | 1977 |
|
SU715376A1 |
| Гусеничная моторная повозка для уборки камыша | 1933 |
|
SU36189A1 |
1. Эксцентриковый шагающий ход для экскаватора, в котором ходовые колеса, насаженные эксцентрично относительно ведущей оси, перекатываются по горизонтальным опорным рамкам, связанным с лыками, которые переставляются самими же ходовыми колесами, отличающийся тем, что каждое ходовое колесо свободно насажено на эксцентричном пальце шайбы, перемещающейся в вертикальных направляющих и имеющей больший диаметр, чем диаметр ходового колеса.
2. Ход по п. 1, отличающийся тем, что перемещающаяся в вертикальных направляющих шайба выполнена трехгранной с наружным очертанием граней равными дугами одного и того же радиуса.
3. Ход по п. 1, отличающийся тем, что перемещающийся в вертикальных направляющих кулак выполнен трехгранным с наружным очертанием граней равными дугами одного и того же радиуса.
