Изобретение относится к вычислительным средствам систем управления и автоматизации производственных процессов, может быть использовано в системе числового программного управления (СЧПУ) станками и другим техническим оборудованием.
Известно устройство для коррекции эквидистанты 1, реализующее способ построения эквидистанты с помощью основного линейнокругового интерполятора и определения поправок к координатам дуг окружностей с помощью вспомогательных линейного и кругового интерполяторов. Недостаток этого устройства - невысокое быстродействие.
Известно устройство 2, реализуюнд,ее способ построения эквидистанты с помощью линейно-кругового интерполятора и сложного вычислительного устройства, способного складывать, делить, возводить в квадрат и извлекать корень.
Кроме слолсности схемы к недостаткам такого устройства относится низкое быстродействие.
Наиболее близко к предлагаемому устройство для коррекции эквидистанты, содержащее блок задания программы, соединенный с первым входом основного линейно-кругового интерполятора и одним входом первого вспомогательного кругового интерполятора, другой вход которого подключен к выходу генератора
тактовых импульсов, а выход - к nepsoMv входу блока сравнения, первый вход которого соединен со входом генератора тактовых импульсов 3.
Недостаток схемы - низкое быстродействие.
Цель изобретения - повыщение быстродействия устройства - достигается тем, что в предлагаемое устройство введен второй всномогательный круговой интерполятор, выход которого соединен со вторым входом основного линейно-кругового интерполятора, а входы - с выходамн блока задания программы, генератора тактовых импульсов и вторым выходом блока сравнения, второй вход которого соединен с соответствующим выходом блок;1 задания программы.
Функциональная электрическая схема устройства приведена на чертеже.
Устройство содержит блок задания программы 1, основной линейно-круговой интерполятор 2, первый вход которого посредством канала 3 соединен с выходом блока программ 1, генератор тактовых импульсов 4, первый
вспомогательный круговой интерполятор 5. второй вспомогательный круговой интерполятор 6, блок сравнения 7, первый вход которого подключен каналом 8 к выходу первого вспомогательного интерполятора 5, второй
вход посредством канала 9 - к выходу блока
задания программы 1, второй выход каналом 10 - к первому входу интерполятора 6, первый выход каналом // - ко входу генератора тактовых импульсов 4, выход которого каналом 12 соединен с первым входом интерполятора 5 и со вторым входом интерполятора 6, выход которого каналом 13 соединен со вторым входом интерполятора 2, третий Вуход каналом 14 - с выходом блока задания программы 1, соответствующий выход которого каналом 15 соединен со вторым входом интерполятора 5.
Устройство работает следующим образом. Информация на отработку дуги кривой из блока задания программы / по каналу 3 поступает в основной линейно-круговой интерполятор 2, и последний начинает отработку дуги эквидистанты, начиная с конечной точки дуги эквидистанты предыдущего кадра. В этот момент тактовые импульсы по каналу 12 поступают из генератора тактовых импульсов 4 на тактовые входы вспомогательных круговых интерполяторов 5 и 6, количество разрядов регистров которых меньше количества разрядов регистров интерполятора 2. Интерполятор 5 отрабатывает дугу исходного контура, начиная с конечной точки дуги предыдущего кадра, а интерполятор 6 - дугу коррекции эквидистанты иачиная с конечной точки дуги коррекции предыдущего кадра. Интериоляторы 5 и 6 действуют до тех нор, пока текущее значение большей коордннаты исходного ког тура, поступающее из интерполятора 5 по каналу 8 в блок сравнения 7, не сравняется со значением конечной точки дуги исходного контура в данном кадре, промасштабированным в соответствии с представлением величин в интерполяторе 5. В этот момент блок сравнения 7 по каналу // отключает генератор тактовых импульсов 4, а по каналу 10 дает команду интерполятору 6 на передачу величин коррекции конечной точки эквидистанты данного кадра по каналу 13 в основной интерполятор 2, который продолжает отрабатывать дугу эквидистанты до скорректированных координат конечной точки эквидистанты. Одновременное начало работы иитериоляторов 2, 5, 6 обеспечивает правильность работы устройства. Таким образом, введение второго вспомогательного кругового интерполятора 6 и связь между блоком задания программы / и блоком сравнения 7 позволяет добиться ненрерывности в отработке эквидистанты и существенно новысить быстродействие устройства.
Формула изобретения
Устройство для коррекции эквидистантЫ; содержащее блок задания программы, соединенный с первым входом основного линейно-кругового интернолятора и одним входом первого вспомогательного кругового интерполятора, другой вход которого подключен к выходу генератора тактовых имнульсов, а выход - к первому входу блока сравнения, первый выход которого соединен со входом генератора тактовых импульсов, отличающеес я тем, что, с целью повышения быстродействия устройства, в него введен второй вспомогательный круговой интерполятор, выход которого соединен со вторым входом основного линейно-кругового интерполятора, а входы - с выходами блока задания программы генератора тактовых импульсов и вторым выходом блока сравнения, второй вход которого соединен с соответствующим выходом блока задания программы.
Источники информации, принятые во внимание при экспертизе:
1.Агурский М. С., Вульфсон И. А., Реми ров В. А. Числовое программное управление станками, «Л ашиностроенне, М., 196G, с. 58- 64.
2.Левин Б. И., Мальчик А. Ю. Способы подготовки программ и интерполяторы для контурных систем числового управления станками. «Мащиностроение, М., 1970, с. 130- 142.
3.Авторское свидетельство № 295113, G 05 В 19/00, 1971.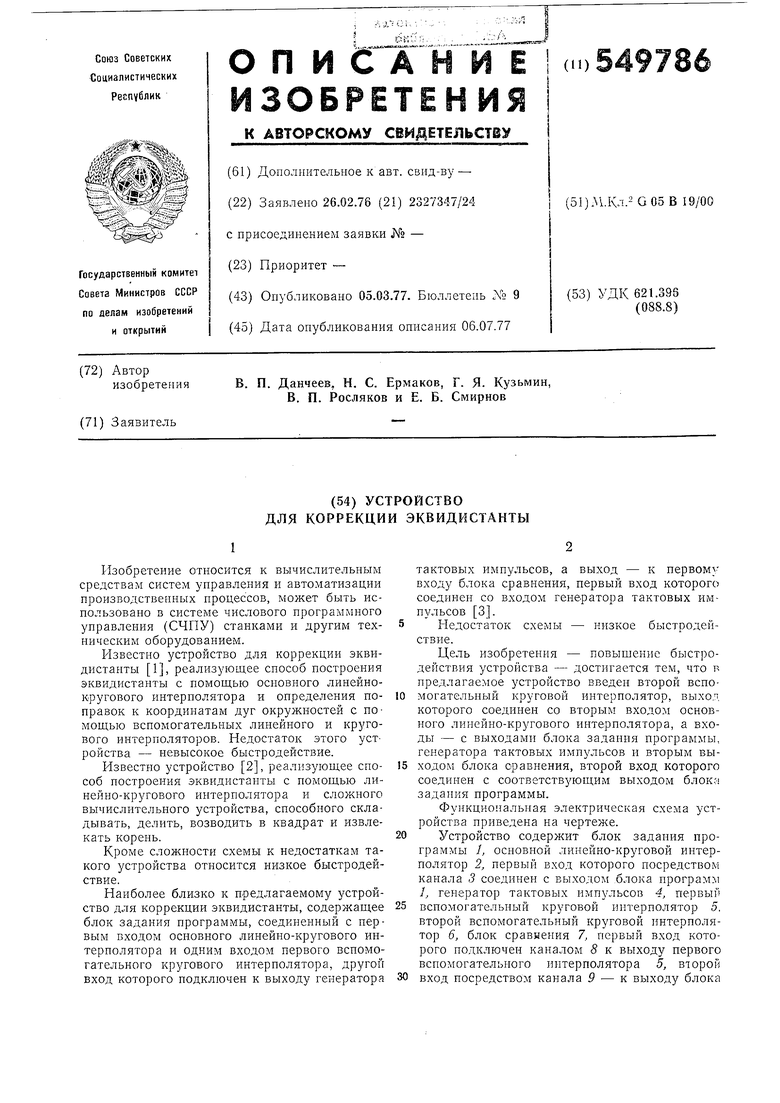

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции эквидистанты | 1975 |
|
SU538344A1 |
| Способ коррекции эквидистанты в системах числового программного управления | 1974 |
|
SU591822A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1317398A1 |
| СПОСОБ КОРРЕКЦИИ ЭКВИДИСТАПТЫЙСЯСОЮЗНАЯ^ • .'*"v-' - -"••;v-||Ap|, . ) .-il : Jb ' , ., •:, .^ -tltit'',b:-u.:^;-;o,,:^KA ( | 1971 |
|
SU295113A1 |
| Интерполятор для систем программного управления | 1977 |
|
SU658528A1 |
| Линейно-круговой интерполятор | 1977 |
|
SU741234A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1275375A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для коррекции эквидистанты | 1977 |
|
SU732816A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |