(54) ПОГРУЗЧИК ДЛЯ ШТАБЕЛИРОВАНИЯ КОНТЕЙНЕРОВ
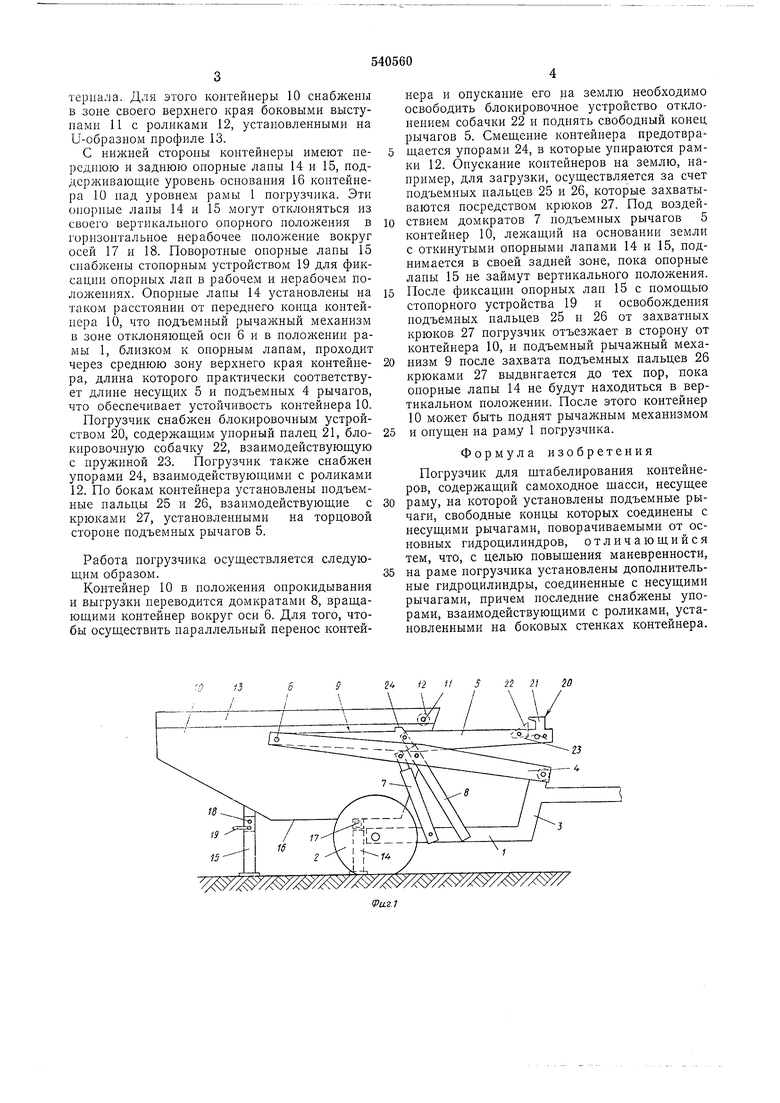
териала. Для этого контейнеры 10 снабжены в зоне своего верхнего края боковыми выступами 11 с роликами 12, установленными на U-образном нрофиле 13.
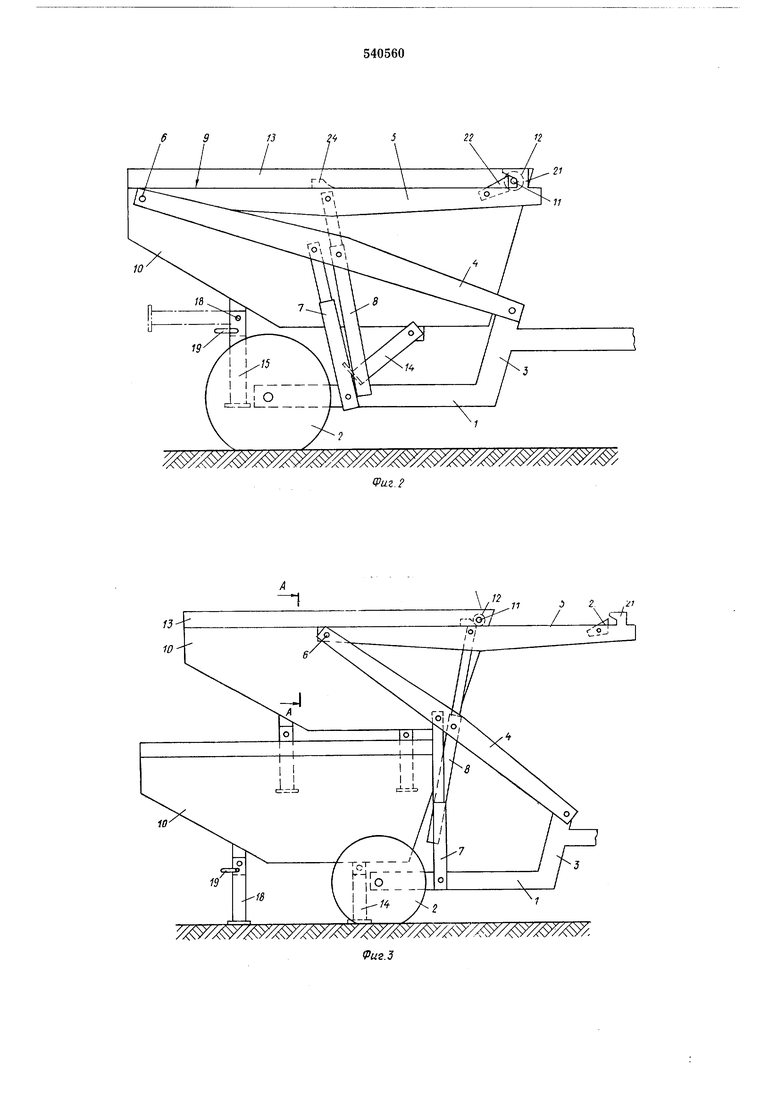
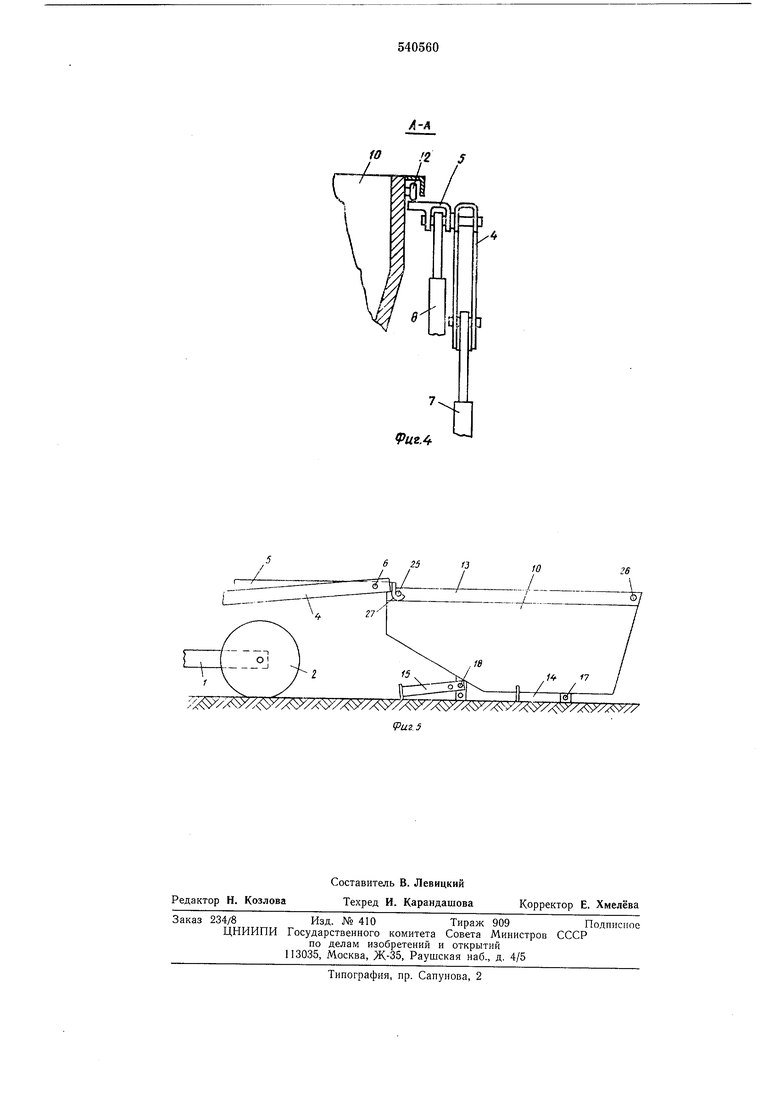
С иижней стороны контейнеры имеют переднюю и заднюю опорные лапы 14 и 15, ноддерживающие уровень основания 16 контейнера 10 над уровнем рамы 1 погрузчика. Эти опорные лапы 14 и 15 могут отклоияться из своего вертикального опорного положения в горизонтальное нерабочее положение вокруг осей 17 и 18. Поворотные опорные лапы 15 спабжены стопорным устройством 19 для фиксации опорных лан в рабочем и нерабочем ноложеииях. Опорные лапы 14 установлены на таком расстоянии от переднего конца контейнера 10, что подъемный рычажный механизм в зоне отклоняющей оси бив положении рамы 1, близком к опорным лапам, проходит через среднюю зону верхнего края контейнера, длина которого практически соответствует длине несущих 5 и подъемных 4 рычагов, что обеспечивает устойчивость контейнера 10.
Погрузчик снабжен блокировочным устройством 20, содержащим упорный палец 21, блокпровочную собачку 22, взаимодействующую с пружиной 23. Погрузчик также снабжен унорами 24, взаимодействующими с роликами 12. По бокам контейнера установлены нодъемные пальцы 25 и 26, взаимодействующие с крюками 27, установленными на торцовой стороне подъемных рычагов 5.
Работа погрузчика осуществляется следующим образом.
Контейнер 10 в положения опрокидывания и выгрузки переводится домкратами 8, вращающими контейнер вокруг оси 6. Для того, чтобы осуществить параллельный перенос контейнера и онускание его на землю необходимо освободить блокировочное устройство отклонением собачки 22 и поднять свободный конец рычагов 5. Смещение контейиера нредотвращается упорами 24, в которые упираются рамки 12. Опускание контейнеров на землю, например, для загрузки, осуществляется за счет подъемных пальцев 25 и 26, которые захватываются посредством крюков 27. Под воздействием домкратов 7 подъемиых рычагов 5 контейнер 10, лежащий на основании земли с откинутыми опорными лапами 14 и 15, поднимается в своей задней зоне, пока опорные лапы 15 не займут вертикального ноложения.
После фиксации опорных лап 15 с помощью стопорного устройства 19 и освобождения иодъемных иальцев 25 и 26 от захватных крюков 27 погрузчик отъезжает в сторону от контейнера 10, и подъемный рычажный механизм 9 после захвата подъемных иальцев 26 крюками 27 выдвигается до тех иор, пока опорные лапы 14 не будут находиться в вертикальном положении. После этого контейнер 10 может быть поднят рычажным механизмом
и оиущен на раму 1 погрузчика.
Формула изобретения
Погрузчик для щтабелирования контейнеров, содержащий самоходное щасси, несущее
раму, на которой установлены подъемные рычаги, свободные концы которых соединены с несущими рычагами, поворачиваемыми от основных гидроцилиндров, отличающийся тем, что, с целью повыщения маневренности,
на раме иогрузчика установлены дополнительные гидроцилиндры, соединенные с несущими рычагами, причем последние снабжены упорами, взаимодействующими с роликами, установленными на боковых стенках контейнера.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ЗАСТРОПОВКИ И ОТСТРОПОВКИ УНИВЕРСАЛЬНЫХ КОНТЕЙНЕРОВ | 1965 |
|
SU176376A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПРИЕМА И ТРАНСПОРТИРОВКИ МУСОРА | 1993 |
|
RU2119883C1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| СКЛАДНАЯ ИНТЕРМОДАЛЬНАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2011 |
|
RU2584043C2 |
| БОЛЬШЕГРУЗНЫЙ ТРАНСПОРТНЫЙ КОНТЕЙНЕР | 1994 |
|
RU2125532C1 |
| ПОДЪЕМНИК | 1993 |
|
RU2061648C1 |
| Устройство для укладки предметов в контейнеры | 1980 |
|
SU929496A1 |
| Ротационная ремизоподъемная каретка для ткацкого станка | 1981 |
|
SU1148568A3 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
69
22
Фиг.З 12
-HhA f-
РигЛ
/« 17
PU.2S
