Известны устройства для автоматической Застроповки и отстроповки универсальных контейнеров, включающие раму с захватными крюками, поворотные и неиодвижные направляющие козырьки и замковый механизм. Замковый механизм выполнен в виде щарнирносоединенных звеньев, связанных с подъемноопускной относительно стоек рамы траверсой с подвещенным к ней несущим противовес рычагом, имеющим на свободном конце ролик, взаимодействующий при перемещении траверсы со смонтированными на раме неподвижной и подвижной площадками. При опускании траверсы ролик, перекатываясь по неподвижной площадке, заходит под нее, а при подъеме, перемещаясь, воздействует на подвижную площадку и на щарнирно-рычажные механизмы управления захватными крюками.
Описываемое устройство для автоматической застроповки и отстроповки универсальных контейнеров отличается от известных тем, что на стойках рамы смонтирована вторая подвижная траверса с комплектом захватных рычагов, расположенная ниже первой, взаимодействующая с ней посредством своего стопорного механизма при их совмещении в процессе работы устройства. Вторая траверса снабжена фигурным рычагом, воздействующим при перемещении траверсы на один из
поворотных подпружиненных направляющих козырьков рамы, который через систему шарнирно-связанных между собой тяг соединен со вторым поворотным направляющим козырьком, расположенным противоположно первому, чем обеспечивается точная наводка устройства на крышу контейнера. Такая конструкция устройства повышает эффективность его работы с контейнерами разного типа размеров.
Стопорный механизм верхней траверсы выполнен в виде управляемых электромагнитами кулачков, взаимодействующих с пазами нижней траверсы при их совмещении.
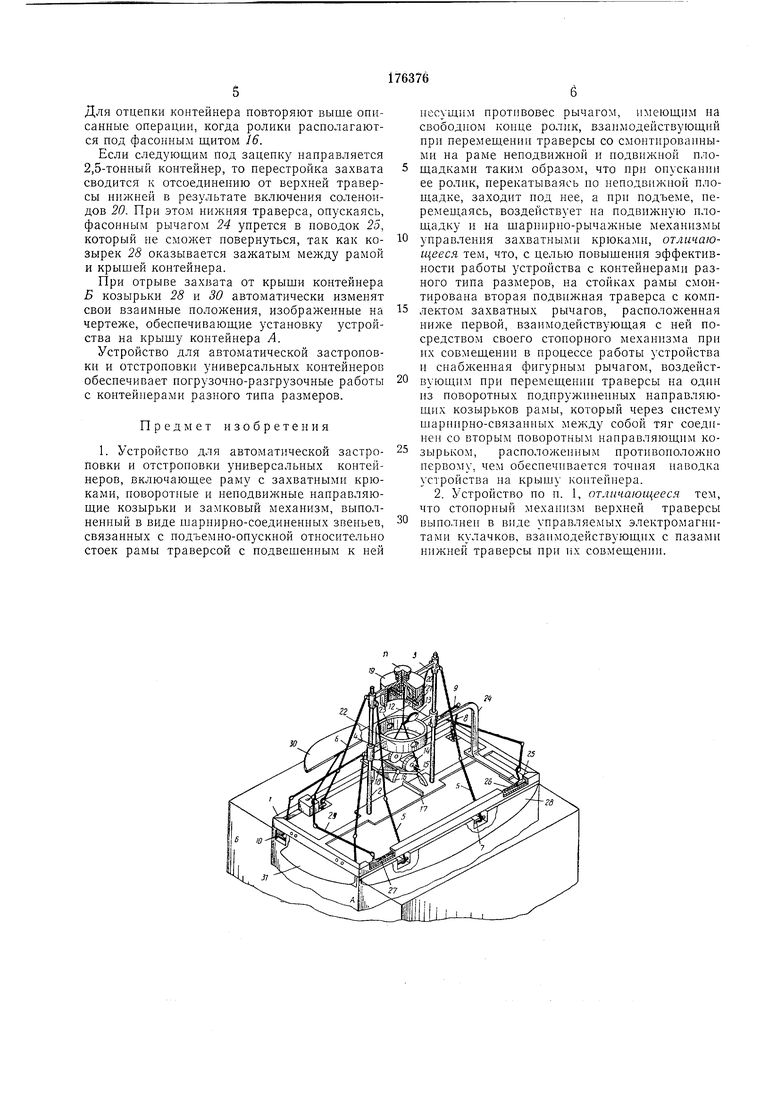
На чертенке изображено предлагаемое устройство.
Устройство для автоматической застроповки и отстроповки универсальных контейнеров содержит раму 1, размеры которой равны размерам крыши 2,5-тонного контейнера А. С рамой жестко связаны направляющие стойки 2, вдоль которых могут перемещаться верхняя 3 и нижняя 4 траверсы, управляющие захватными крюками, каждый комплект которых состоит из четырех крюков. Одним комплектом крюков, которыми заканчиваются рычаги 5, подвижно связанные через рычаги 6 с верхней траверсой, осуществляется захват за скобы 7 контейнера А. Другим комплектом крювижно связанные через рычаги 9 с нижней траверсой, осуществляется захват за скобы 10 5-тонного контейнера Б. Крюки подвижно соединяются с рамой. Каждый комплект крюков попарно размеш,ается по длинной и короткой сторонам рамы.
На чертеже контейнер А внисан посередине контейнера Б.
Верхняя траверса имеет оголовок // для крепления к валу поворотчика погрузчика или крана. С верхней траверсой подвижно соединен рычаг 2 с асимметрично расположенным противовесом 13. На свободном конце рычага 12 расположены ролики 14.
На раме устройства жестко закреплена наклонная неподвижная площадка 15, заканчивающаяся фасонным щитом 16. Под ней расположен направляющий щит 17, жестко связанный с рамой устройства.
Продолжением неподвижной площадки служт подвижная площадка 18.
На верхней траверсе укреплен перевернутый стакан 19, в котором размещены соленоиды 20, управляющие подпружиненными кулачками-сердечниками 21. Нижняя траверса снабжена стаканом 22 с отверстиями 23 на боковой поверхности и на ней жестко закреплен фасонный рычаг 24, взаимодействующий с поводком 25, жестко укрепленным на валу, который пружинами 26 и 27 соединен с рамой. С поводком 25 жестко связан поворотный направляющий козырек 28, расположенный по одной из длинных сторон рамы, а с козырьком - система щарнирно-соединенных между собой тяг 29, связывающих козырек 28 со вторым подвижным козырьком 30, расположенным противоположно первому. На одной короткой стороне рамы неподвижно сидит направляющий козырек 31. При таком расположении поворотного направляющего козырька 28 устройство углом, образуемым этим козырьком и неподвижным направляющим козырьком 31, наводится на крыщу контейнера А и накладывается на него.
Козырек 28 занимает рабочее положение благодаря тому, что поводок 25 под действием веса нижней траверсы и фасонного рычага 24 повернут в горизонтальное положение. При этом второй козырек 50, связанный с первым посредством системы тяг 29, занимает нерабочее положение, а траверса 4 - крайнее нижнее положение.
При подъеме верхней траверсы крюки рычагов 5 зацепляются за скобы 7 контейнера А, и он может быть поднят.
Для отцепки контейнера крановщик, ослабляя тяговый трос, опускает верхнюю траверсу до крайнего нижнего положения, при этом ролики 14 скатываются с неподвижной наклонной площадки 15. Стакан 19 траверсы 3 соединяется со стаканом 22 траверсы 4 с помощью подпружиненных кулачков 21, которые при совпадении с отверстиями 23 стакана 22 войдут в них.
хвату, также 2,5-тонный, то при подъеме захвата и для подготовки его нод зацепку крановщик включает соленоиды 20 управления кулачками 21 стопорного механизма верхней траверсы. Сердечники соленоидов втянутся внутрь стакана 19 и при подъеме верхней траверсы ролики 14, выжимаемые противовесом 13 и направляемые щитом 17, займут положение под фасонным щитом 16. Усилие подъема
будет передаваться на неподвижную площадку 15 и при подъеме захвата крюки отцепятся от скоб 7 контейнера А. В таком положении захват может быть снят с крыщи предыдущего контейнера и. наброщен на крыщу следующего такого же контейнера.
Для зацепки контейнера крановщик ослабляет тяговый трос, опускает верхнюю траверсу. Ролики 14, отрываясь от фасонного щита 16, выжимаемые противовесом 13, попадут
под подвижную площадку 18. При дальнейщем подъеме верхней траверсы площадка 18 повернется вокруг оси, и ролики зай.мут положение над площадками. Тяговое усилие будет передаваться на захватные крюки рычагов 5,
которые, повернувшись вокруг неподвижных осей, вмонтированных в раму, зацепят контейнер за скобы 7.
Если следующий контейнер, предназначенный для зацепки, 5-тонный, то при отцепке
захвата от 2,5-тонного траверсы 3 и 4 оставляют соединенными и подтягивают их до тех пор, пока ролики не попадут под фасонный щит 16. Нкжняя траверса, а с нею и фасонный рычаг 24 поднимутся на такую высоту,
что поводок 25 выйдет из-под рычага 24.
Поводок 25, жестко связанный с валом направляющего козырька 28, может быть повернут под действием пружин 26 н 27 в положение, близкое к вертикальному. Поворот поводка невозможен до тех пор, пока козырек 28 прижимается к боковой поверхности контейнера.
При подъеме захвата и отрыве от контейнера козырька 28 последний, поворачиваясь
вместе с валом и поводком, размещается под рамой устройства. При повороте козырька 28 на соответствующий угол повернется и козырек 30 за счет системы тяг.29, связывающих козырьки между собой. В таком положении
захват готов для зацепки контейнера Б, наводку на крыщу которого осуществляют углом, теперь образованным плоскостями неподвижного козырька 31 и подвижного козырька 30.
Для зацепки 5-топного контейнера за скобы 10 крюками рычагов 8, управляемыми нижней траверсой, крановщик, ослабляя тяговый трос, подает вниз верхнюю траверсу и с ней связанную нижнюю траверсу. При этом ролики 14 будут выведены противовесом 13 из-под фасонного щ.ита 16. Теперь при подъеме траверс ролики повернут подвижную направляющую площадку 18, а нижняя траверса через рычаги 8 и 9 повернет захватные крюки,
Для отцепки контейнера повторяют выше описанные операции, когда ролики располагаются под фасонным щитом 16.
Если следующим под зацепку направляется 2,5-тонный контейнер, то перестройка захвата сводится к отсоединению от верхней траверсы нижней в результате включения соленоидов 20. При этом нижняя траверса, опускаясь, фасониым рычагом 24 упрется в поводок 25, который не сможет повернуться, так как козырек 28 оказывается зажатым между рамой и крышей контейнера.
При отрыве захвата от крыши контейнера Б козырьки 28 и 30 автоматически изменят свои взаимные положения, изображенные на чертеже, обеспечивающие установку устройства на крышу контейнера А.
Устройство для автоматической застроповки и отстроповки универсальных контейнеров обеспечивает погрузочно-разгрузочные работы с контейнерами разного типа размеров.
Предмет изобретения
1. Устройство для автоматической застроповки и отстроповки универсальных контейнеров, включающее раму с захватными крюками, поворотные и неподвижные направляющие козырьки и замковый механизм, выполненный в виде шарнирно-соединенных звеньев, связанных с подъемно-опускной относительно стоек рамы траверсой с подвешенным к ней
несущим противовес рычагом, имеющим на свободном конце ролик, взаимодействующий при перемещении траверсы со смонтированными на раме неподвижной и подвижной площадками таким образом, что при опускании ее ролик, перекатываясь по неподвижной площадке, заходит под нее, а при подъеме, перемещаясь, воздействует на подвижную площадку и на щарнирно-рычажные механизмы управления захватными крюками, отличающееся тем, что, с целью повышения эффективности работы устройства с контейнерамн разного типа размеров, на стойках рамы смонтирована вторая подвпжная траверса с комплектом захватных рычагов, расположенная ниже первой, взаимодействующая с ней посредством своего стопорного механизма при их совмещении в процессе работы устройства и снабл енная фигурным рычагом, воздействующим при перемещен 1и траверсы на один из поворотных подпружиненных направляющих козырьков рамы, который через систему шар1И1рно-связанных между собой тяг соединен со вторым поворотным направляющим козырьком, расположенным противоиоложно первому, чем обеснечивается точная наводка устройства на крышу О11тейнера.
2. Устройство по п. 1, отличающееся тем, что стопорный механизм верхней траверсы выполнеи в виде управляемых электромагнитами кулачков, взаимодействующих с пазами нижней траверсы при их совмещении.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ЗАСТРОПОВКИ и ОТСТРОПОВКИ КОНТЕЙНЕРОВ | 1966 |
|
SU179453A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1973 |
|
SU388997A1 |
| Грузозахватное устройство | 1989 |
|
SU1720986A1 |
| Захватное устройство для грузов с проушинами | 1990 |
|
SU1787925A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Автоматический захват для штучных грузов | 1972 |
|
SU439459A1 |
| Грузоподъемное устройство на автомобиле-фургоне | 1986 |
|
SU1382690A1 |
| Захватное устройство для мягких контейнеров | 1991 |
|
SU1781159A1 |
| Устройство для подъема и раскрывания двухстворчатых кюбелей | 1957 |
|
SU113430A1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
