(54) ВОЛОЧИЛЬНЬГЙ СТАН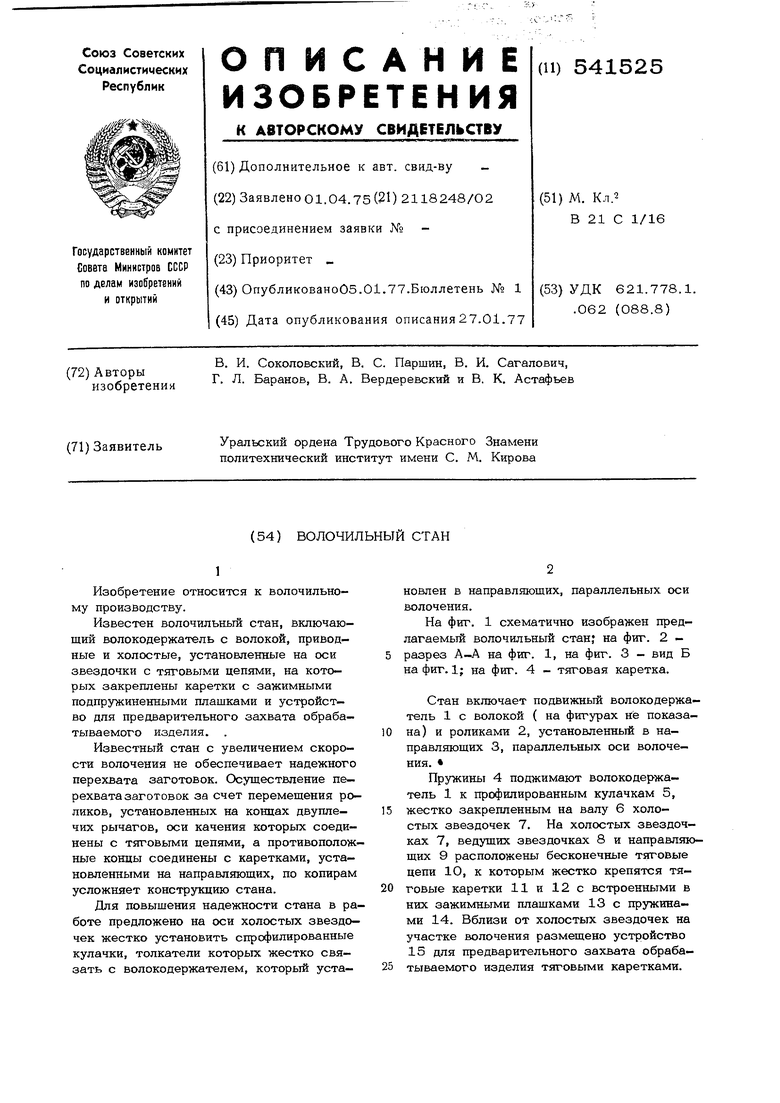
| название | год | авторы | номер документа |
|---|---|---|---|
| Волочильный стан | 1980 |
|
SU935150A1 |
| Волочильный стан | 1976 |
|
SU599876A1 |
| Волочильный стан | 1980 |
|
SU925466A1 |
| Волочильный стан | 1975 |
|
SU558735A1 |
| Волочильный стан | 1980 |
|
SU950461A1 |
| Непрерывный волочильный стан | 1977 |
|
SU743742A1 |
| Непрерывный волочильный стан | 1978 |
|
SU801929A1 |
| Непрерывный волочильный стан | 1981 |
|
SU980894A1 |
| Волочильный стан | 1982 |
|
SU1042834A1 |
| Волочильный стан | 1983 |
|
SU1126350A1 |
Изобретение относится к волочильному производству.
Известен волочильный стан, включающий волокодержатель с волокой, приводные и холостые, установленные на оси звездочки с Т5п овыми цеп$п« и, на которых закреплены каретки с зажимными подпружиненными плашками и устройство для предварительного захвата обрабатываемого изделия. .
Известный стан с увеличением скорости волочения не обеспечивает надежного перехвата заготовок. Осуществление перехвата заготовок за счет перемещения роликов, установленных на концах двуплечих рычагов, оси качения которых соединены с тяговыми цепями, а противоположные концы соединены с каретками, установленными на направляющих, по копирам усложняет конструкцию стана.
Для повышения надежности стана в работе предложено на оси холостых звездочек жестко установить спрофилированные кулачки, толкатели которых жестко связать с волокодержателем, который установлен в направляющих, параллельных оси волочения.
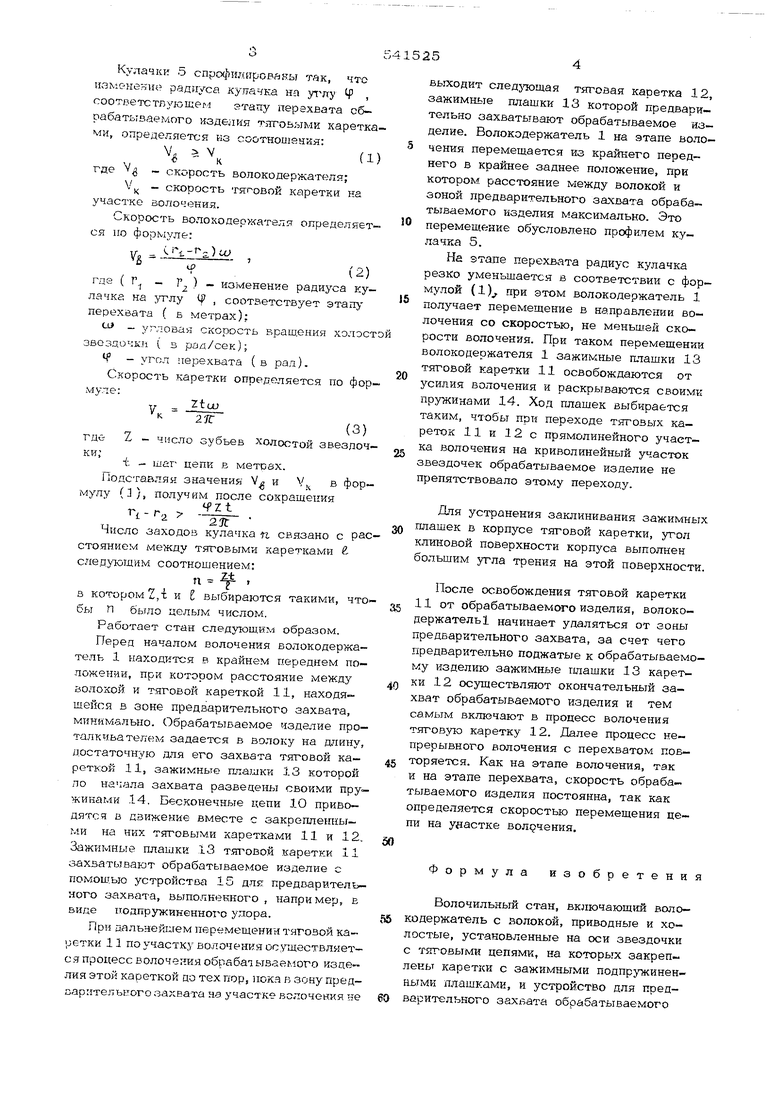
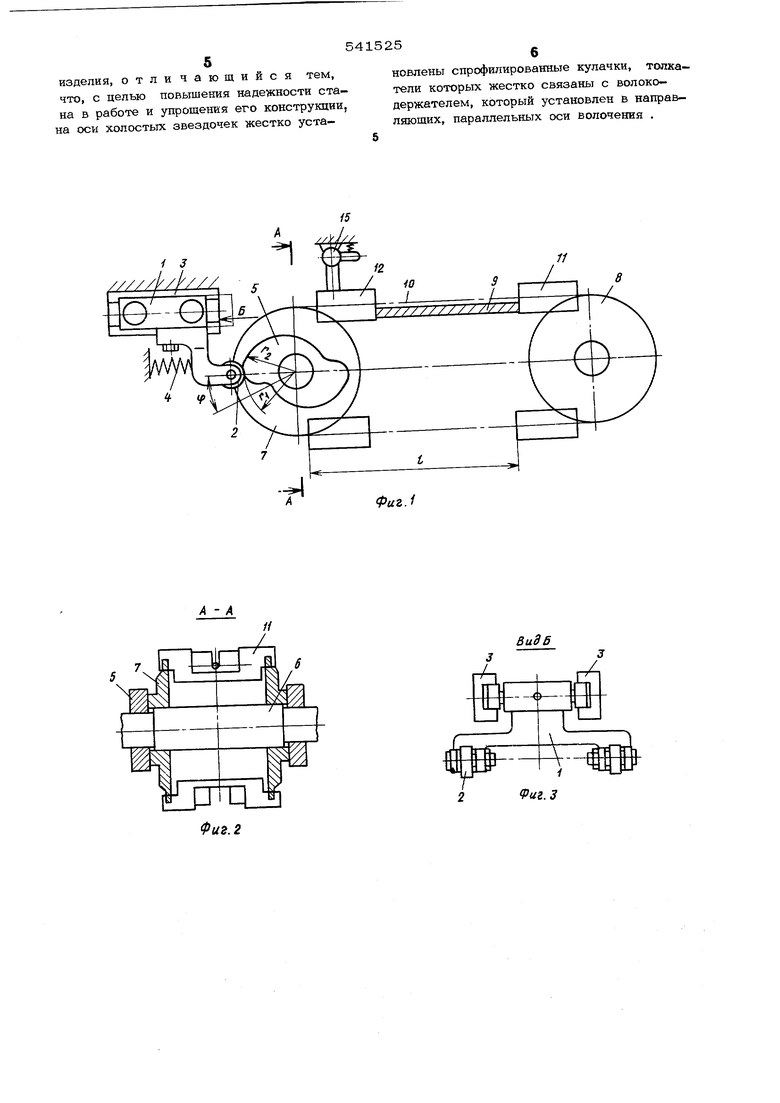
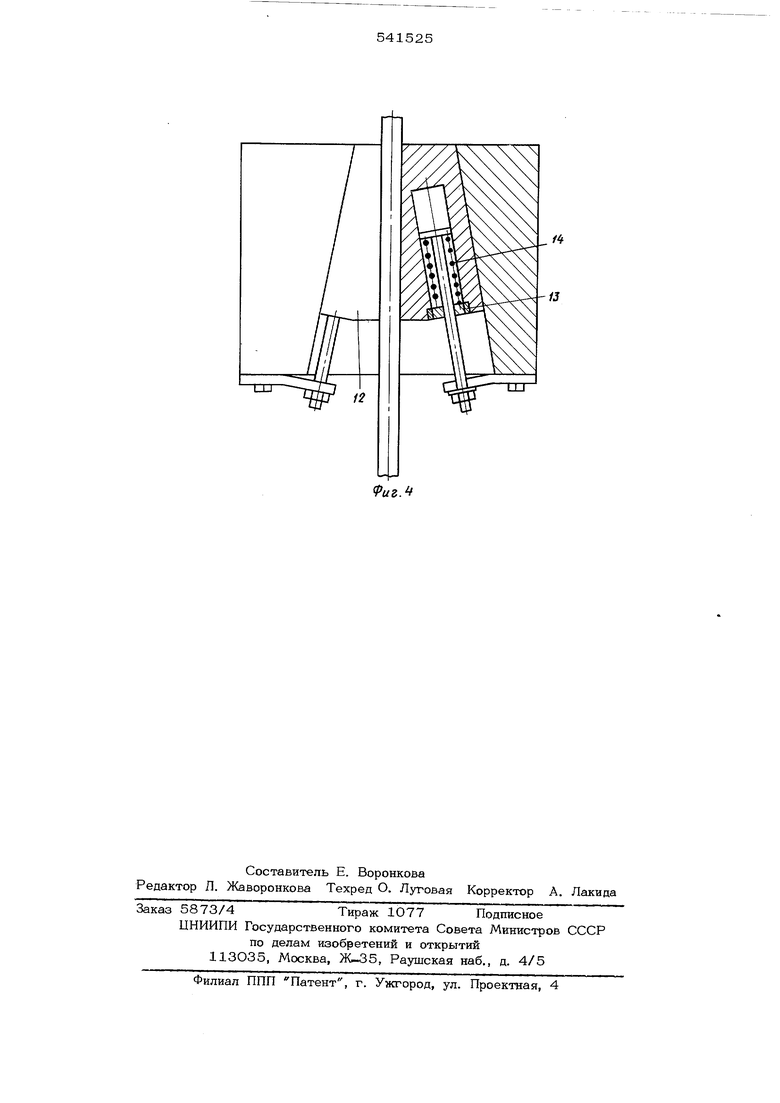
На фиг. 1 схематично изображен предлагаемый волочильный стан, на фиг. 2 разрез А-А на фиг. 1, на фиг. 3 - вид В на фиг. 1; на фиг. 4 - тяговая каретка.
Стан включает подвижный волокодержа тель 1 с волокой ( на фигурах не показана) и роликами 2, установленный в направляющих 3, параллельных оси волочения.
Пружины 4 поджимают волокодержатель 1 к профилированным кулачкам 5, жестко закрепленным на валу 6 холостых звездочек 7. На холостых звездочках 7, ведущих звездочках 8 и направляющих 9 расположены бесконечные тяговые цепи 10, к которым жестко крепятся тяговые каретки 11 и 12 с встроенными в них зажимными плашками 13 с пружинами 14. Вблизи от холостых звездочек на участке волочения размещено устройство 15 для предварительного захвата обрабатываемого изделия тяговыми каретками. Кулачки .э спрофилировАкы так, что иамене ; раднуса куиачка на ут-лу Ф , соотБетствующем этапу перехвата сбрабатьтваемого изделия тяговыми каретками, определяется кз соотношения: V. 5 V. где V скорость волокодержателя; V| - скорость тяговой каретки на участке золочения. Скорость БОЛОкодержателя определяется по формуле: У . , (2) где ( Г - Г) - изменение радиуса кулачка на углу tf , соответствует перехвата ( в метрах); ti - угловая скорость вращения холост звездочки ( 3 рад/сек); Ц - угол перехвата ( в рад). Скорость каретки определяется по формуле:(3) где Z - число зубьев холостой звездочки;i, - шаг цепк в метрах. Подставляя значения V и Y, в формулу (3), получим после сокращения г.-г 2ЯГ Число заходов кулачка -п. связано с рас стоянием между тяговыми каретками и. следующим соотношением: п 4 . в котором Z,i; и Е выбираются такими, что бы п было целым числом. Работает стан следующим образом. Перед началом волочения волокодержатель 1 находится в крайнем переднем по- ложенаи, при котором расстояние между волохой и тяговой кареткой 11, находящейся в зоне предварительного захвата, минимально. Обрабатываемое изделие проталкивателем задается в волоку на длину, достаточную для его захвата тяговой кареткой 11, зажимные плашки 13 которой ло начала захвата разведены своими пружинами 14. Бесконечные цени 1О приводятся в движение вместе с закрепленными на них тяговыми каретками 11 и 12 Зажимные плашки 13 тяговой каретки 11 захватывают обрабатываемое изделие с помощью устройства 15 для предваритель ного захвата, выполненного , например, в виде подпружиненного упора. Г1ри дальнейшем перемещении тяговой каретки 11 по участку волочения осуществляется процесс волочения обрабатываемого изде- ЛИЯ этой кареткой до тех пор, пока в зону пре дсармтельного захвата на участке волочения не выходит след5тощая тяговая каретка 12, зажимные плащки 13 которой предварительно захватывают обрабатываемое изделие. Волокодержатель 1 на этапе воло- чения перемещается из крайнего переднего в крайнее заднее положение, при котором расстояние между волокой и зоной предварительного захвата обрабатываемого изделия максимально. Это перемещение обусловлено профилем кулачка 5. На этапе перехвата радиус кулачка резко уменьщается в соответствии с формулой (1) при этом Волокодержатель 1 получает перемещение в направлении волочения со скоростью, не меньщей скорости волочения. При таком перемещении волокодержателя 1 зажимные плащки 13 тяговой каретки 11 освобождаются от усилия волочения и раскрываются своими пружинами 14. Ход плащек выбирается таким, чтобы при переходе тяговых кареток 11 и 12 с прямолинейного участ- ка волочения на криволинейный участок звездочек обрабатываемое изделие не препятствовало этому переходу. Для устранения заклинивания зажимных плашек в корпусе тяговой каретки, угол клиновой поверхности корпуса выполнен большим угла трения на этой поверхности. После освобождения тяговой каретки 11 от обрабатываемого изделия, вопокодержатель начинает удаляться от зоны предварительного захвата, за счет чего предварительно поджатые к обрабатываемому изделию зажимные плашки 13 каретки 12 осуществляют окончательный захват обрабатываемого изделия и тем самым включают в процесс волочения тяговую каретку 12. Далее процесс непрерывного волочения с перехватом повторяется. Как на этапе волочения, так и на этапе перехвата, скорость обрабатываемого изделия постоянна, так как определяется скоростью перемещения цепи на уаастке волочения. Формула изобретения Волочильный стан, включающий воло- кодержатель с волокой, приводные и холостые, установленные на оси звездочки с тяговыми цепями, на которых закреплены каретки с зажимными подпружиненными плащками, и устройство для предварительного захвата обрабатываемого
изделия, отли чающийся тем, что, с целью повышения надежности стана в работе и упрошения его конструкции, на OCVI холостых звездочек жестко установлены спрофилированные кулачки, толкатели которых жестко связаны с волоко- держателем, который установлен в направляющих, параллельных оси волочения .
Фиг.1
иг.з
