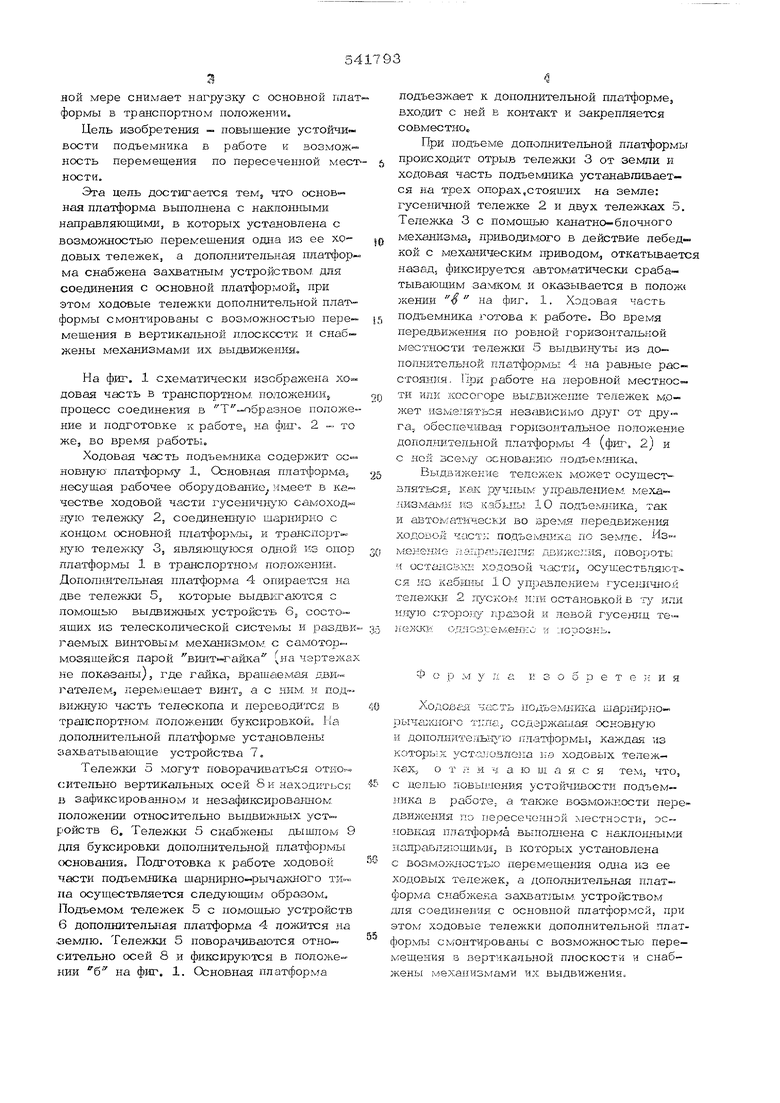
ной мере сни.мает нагрузку с основной пла формы в транспортном положении. Цель ивобретения - повышение устойчи вости подъемника в работе к возможность перемещения по пересеченной мест ности. Эта цель достигается тем, что основная платформа выполнена с наклонными направляющими, в которых установлена с возможностью перемещения одна из ее ходовых тележек, а дополнительная платформа снабжена захватным устройством, для соединения с основной платформой, при этом ходовые тележки дополнительной платформы смонтированы с возможностью перемещения в вертикальной плосксстк и снабжены механизмами их выдвижения На фиг. 1 схематически изобрал ена хо довая часть в транспортном, положении,. процесс соединения в Т -образное положа нне и подготовке к работе, на фиг. 2 - то же, во время работы. Ходовая часть подъемника содержит ос новную платформу 1, Основная плат-форма; несущая рабочее oбopyдoвaниe имеет в качестве ходовой части гусеничную самоход 2-1ую тепежку 2, соединенную шарнирно с кондом, основной п.латформы, и транспор- Hjno тележку 3, являющуюся одной кз опор платформы 1 в транспортном жзложэнии. Дополнительная платформа 4 ог ирае.гся на две тележки 5, которые выдвигаются с пом.ощью выдвияшых устройств 65 состоящих из телескопической системы и разд.ви аемых винтовым м.еханнзмом. ; сам.отормозяшейся парой винт-г-айка чартажа не показаны), где гайка, врашаем.ая дви-гателем, переы.ещает винт, а с ним. и подвижную часть телескопа и переводится в транспортном, положении буксировкой. lia дополшитепьной платформе установлены гшхватывающие устройства 7, Тележки 5 могут поворачиваться сительно вертикальных осей 8 и находиться в зафиксированном .и незафиксированном, положении относительно выдвижных устройств 6. Тележки 5 снабжены дышлом 9 для буксировки дополнительной платформы сюнования. Подготовка к работе ходовой части подъемршка шарнирно-рычажного ти™ па осуществляется следующим образом, Подъемом тележек 5 с пом.ощью устройств 6 дополнительная платформа 4 лонштся на аемлю. Тележки 5 новорачиваюгся относительно осей 8 .и фиксируются в положении б на фиг. 1. Основная плат подъезжает к дополнительной платформез входит с ней в контакт и закрепляется совместно При подъеме дополнительной платформы происходит отрыв тележки 3 от земли и ходовая ча-сть подъемника устанавливается на трех опорах,СТОЯШ.НХ на земле: гусеничной тележке 2 и двух тележках 5. Тележка 3 с помощью калатно-бпочного механизма.; приводимого в действие лебедкой с механическим приводом, откатывается назад, фиксируется .-автоматически сраба. тываюшим замком, и оказывается в полож( жении на фиг. 1. Ходовая часть подъемника .готова к работе. Во время передвижения по ровной горизон-тальной местности тележки 5 выдвин5ты из дополнительной платформы 4 на равные рас- С-ГОЯНИ.Я. 1.ШИ работе на неровной местное- ти ипк косогоре .выдвижение тележек м.о- жет излшпяться нез;авискмо друг от друга., обес.печивая горизонтальное положение дополнитепьной п.латфоргуты 4 (фиг, 2) и с ней зселгу (основанию подъемника. Выдвижерл-ш тедожек может осуществляться,, как р;гчиым управлением м.еха/{измами из кабы1ы 10 подъел/гника так .и автоматичесв,.и во время передвижения ХОДОВО.Й частк пoдъe EIИкa по земле, з- менение ;-1адр Ьлеки2 двил еиия; повороты а ocTai-ic.BKK ходовой части, осуществляют- ся из кабаны 10 управлением гусеничной о о и е т е Ходовея часть подъелскйка шарниртю- рычссш-юго Tirna, содержащая основную и дополните ribiijio платформы, каждая из которых уст.-;аювле а кв ходовых тележкеХ; о т л и ч а ю щ а я с я тем., что, с цепью повышения устойчивости подъемника в рабств; а также возможности передвилсення п.о пересеченной местности, эс.човная платформа выполнена с наклоннъхми ;1алравпя1ощимл, в которых ycTajiOBHeHa ВОЗМ.ОЖНОСТЫО пере.мещения одна из ее ходовых тележек, а дополнительная платорма снабже.ка захватным, устройством ля соединения с основной платфор.мой, при том ходовые тележки дополнительной платор.мъ смонтированы с возможностью переещения в вертикальной плоскости и снабены механизмами их выдвижения.
N
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| Гусеничная ходовая тележка крана | 1983 |
|
SU1146274A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2002 |
|
RU2314961C2 |
| СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2003 |
|
RU2252889C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ПУТЕВЫХ ЗВЕНЬЕВ | 1995 |
|
RU2088720C1 |
| Самоходный грузоподъемный кран | 1990 |
|
SU1776630A1 |
| Устройство для выгрузки крупногабаритного оборудования | 1982 |
|
SU1111968A1 |
| Установка сухого тушения кокса | 1978 |
|
SU1002345A1 |
| Гусеничный движитель транспортного средства | 1991 |
|
SU1799795A1 |
| МАШИНА ДЛЯ СБОРА УРОЖАЯ ВЫСОКОТРАВНЫХ ГЕЛОФИТОВ И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2007 |
|
RU2392792C1 |


