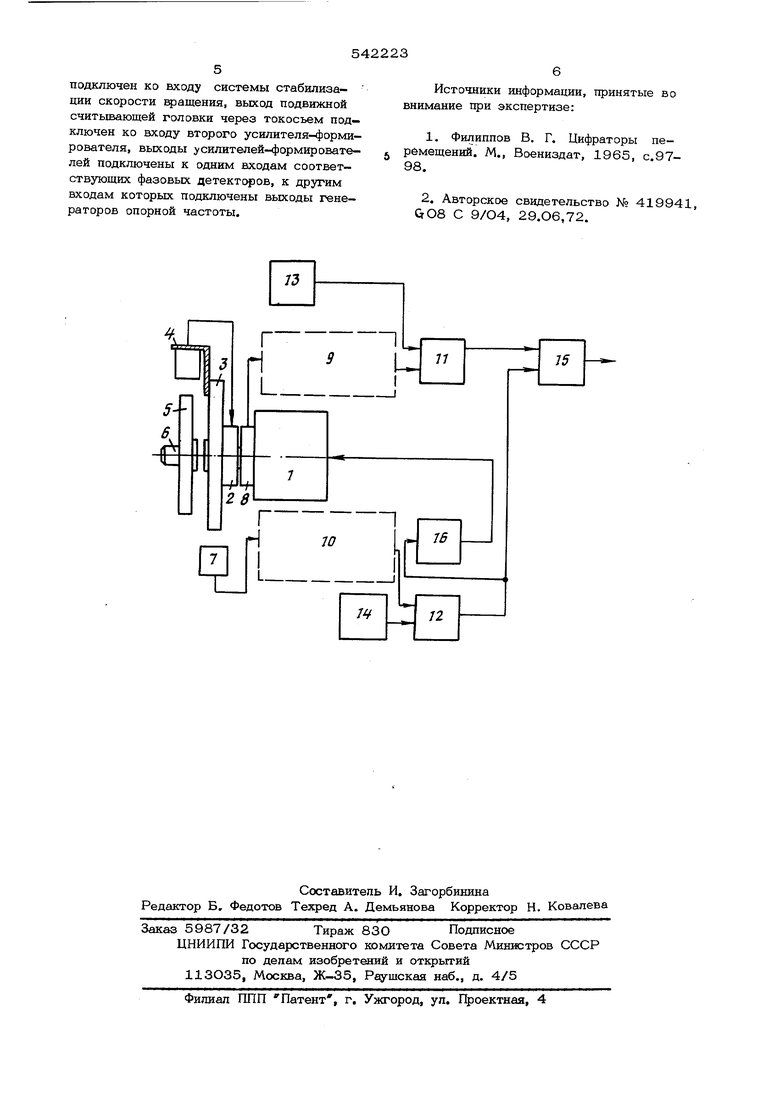
На валу электродвигателя 1 установле ротор токосъема 2 и подвижный кодовый диск 3, на котором размещена подвижная считывающая головка 4, расположенная напротив меток кодового диска 5, соедин ного со входным валом 6. Неподвижная считывающая голсвка 7 расположена напротив магнитных меток кодового диска Статор токосъема 8 и выход неподвижной считывающей головки 7 подключены через соответствующие усилители-формирователи 9 и 1О к одним входам фазовых детек торов 11 и 12, к другим входам котор подключены соответствующие генераторы 13 и 14 опорной частоты. Выходы фазовых детекторов 11 и 12 подключены ко входам сумматора 15. Выход подвижносчитывающей головки подключен к ротору токосъема 2. Токосъем может быть бесконтактным, например индуктивнъш. Выход фазового детектора 12 подключен через систему стабилизации скорости вращения 16 ко входу электродвигателя 1. Система стабилизации скорости вращения может быть выполнена на основе тиристорного широтно -импульсного преобразователя. Работает преобразователь следующим образом. Электродвигатель 1, управляемъш сис темой стабилизации скорости вращения 1 вращается с постоянной скоростью, которая стабилизируется частотой генератора опорной частоты 14 и выходным сигнало фазового детектора 12. Въгходное напряжение фазового детектора несет в себе информацию о колебаниях угла вала электродвигателя 1 по цепи: неподвижная считывающая головка усилитель-формирователь 1О, фазовый де тектор 12 с частотой - число меток на кодовом диске 3. Шд - скорость вращения электродв гателя 1, Информация о перемещениях входного вала 6, считываемая подвижной считывающей головкой 4 с кодового диска 5 с частотой f имеет вид: число магнитнъхх меток на кодовом диске 3; скорость вращения входного вала 6. Далее напряжение выхода считывающей головки 4 с частотой f,, поступает на ротор токосъема 2. Фазовъй детектор формирует напряжение на выходе в зависимости от фазового рассогласования частот с усилителя-формирователя 9 эталонной и генератора 13 опорной частоты. Напряжение его вьЕСода зависит только от фазового рассогласования частот i На въкоде фазового детектора 12 кроме полезного сигнала о перемещениях входного вала 6 имеется низкочастотная составляющая, вызванная колебаниями скорости электродвигателя 1. В то же время информация об этих колебаниях со- держится в въгходном напряжении фазового детектора 11. В сумматоре 15 переменная составляющая в выходном напряжении детектора 11 компенсируется аналогичной составляющей в въкодном нап- ряжении фазового 12. Таким образом, основная погрешность измерения перемещений входного вала, вызванная нестабильностью скорости вращения электродвигателя, в предлагаемом преобразова- теле устраняется. Высокая точность измерений угловых перемещений входного вала в статических и динамических режимах его работы существенно расщиряет функциональные возможности устройств, в которък используется предлагаемъш преобразователь. Применение его в системах автоматизированного электропривода, в частности позволяет распространить ча них фазовьй принцип управления, а следовательно и их точностные показатели. Формула изобретения Преобразователь угла поворота вала в электрический сигнал, содержащий кодовые диски с магнитными метками и неподвижную и подвижную считывающие головки, причем подвижная считывающая головка размещена на диске, установленном на одном валу с ротором токосъема и электродвигателем, вход которого соединен с выодом системы стабилизации скорости вращения, въкод неподвижной считьшаю- щей головки соединен с входами первого усилителя-формирователя, второй усилитель-формирователь, отличающийся тем, что, с целью повышения точности преобразователя, в него введены генераторы опорной частоты, сумматор .и фазовые детекторы, выходы которък соединены со входами сумматоpa, въ1ход первого фазового детектора
подключен ко входу системы стабилизации скорости ращения, выход подвижной считьшающей головки через токосъем подключен ко входу второго усилителя-формирователя, выходы усилителей-формирователей подключены к одним входам соответствующих фазовых детекторов, к другим входам которых подключены выходы генераторов опорной частоты.
Источники информации, принятые во внимание при экспертизе:
1. Филиппов В. Г. Цифраторы перемещений. М., Воениздат, 1965, с.9798.
2. Авторское свидетельство № 419941, CrOS С 9/04, 29.06,72.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ изготовления эталона для проверки преобразователей угла поворота | 1973 |
|
SU578649A1 |
| Преобразователь угла поворота вала в интервалы времени | 1989 |
|
SU1661999A1 |
| Устройство для стабилизации скоростиВРАщЕНия элЕКТРОпРиВОдА | 1979 |
|
SU811469A1 |
| Устройство для стабилизации скорости электродвигателя | 1972 |
|
SU498700A1 |
| Устройство управления скоростью дискового носителя информации | 1986 |
|
SU1455361A1 |
| Способ угловых гармонических ускорений | 1975 |
|
SU577460A1 |
| Устройство для стабилизации скорости электродвигателя | 1982 |
|
SU1035764A2 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ИМПУЛЬСНЫЙ СИГНАЛ | 1972 |
|
SU419941A1 |
| Преобразователь угол-код | 1983 |
|
SU1116447A1 |
| Электропривод постоянного тока | 1981 |
|
SU978304A1 |
