(54) ХРАПОВОЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Храповой механизм | 1981 |
|
SU1033800A1 |
| Устройство для обработки периодически повторяющихся участков с фасонной поверхностью на деталях типа тела вращения | 1976 |
|
SU657973A1 |
| Привод транспортного устройства | 1979 |
|
SU829498A1 |
| Устройство для резки труб | 1986 |
|
SU1450935A1 |
| Устройство для сборки узлов | 1978 |
|
SU764923A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Станок для нанесения граней на стеклоизделия | 1983 |
|
SU1106640A1 |
| Многопозиционный штамп для обработки штучных заготовок | 1980 |
|
SU940950A1 |
| Устройство для поштучной выдачи деталей | 1988 |
|
SU1608000A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ДВУХФОНТУРНОЙ КРУГЛОВЯЗАЛЬНОЙ МАШИНОЙ | 1970 |
|
SU264597A1 |
1
Изобретение относится к механизмам прерывистого вращения и может быть использовано в любой отрасли машиностроения.
Известны храповые механизмы, содержащие храповое колесо, собачку и фщссируюшее устройство, вьтолненное в виде фиксирующего с ним фиксатора и дополнительных звеньев, связывающих фиксатор с приводом механизма ij и 2.
Такие механизмы имеют сложную конструцию из-за большого числа звеньев, фиксирующих храповое колесо.
Наиболее близок к изобретению храповой мехаш зм, содержащий храповое колесо с рабочей собачкой, водило, на котором размещена ось рабочей собачкИ; и фиксирующую собачку, взаимодействующую с храповым колесом з .
В таком механизме для фиксации храповэго колеса используется меньшее количество звеньев. Однако он не обеспечивает достаточной степени надежности и точности фиксации, так как фиксация осуществляется только в конце рабочего хода и выстоя храпового колеса, а при холостом ходе собачки происходит самопроизвольная расфиксания. Кроме тэг о, храповое колесо фиксируется только в одном направлении, что может привести к дальнейщему повороту храпового колеса по инерции или под действием ударньи: нагрузок, возкикающ1гх в момент остановок.
Ие.ть изобретения - повышение надежности и точности фиксации храпового колеса.
Эта цель достигается тем, что храповой механизм снабжен размещенными на фиксирующей собачке копирными накладками, расположе1шой на водиле и подпружиненной в радиальном направлении храпового колеса вилкой и устано.вленными на ней роликами, взаимодействующими с копггрными накладкаык, а на фиксирующей собачке выполнен паз форма которого соответствует форме зубьев храпового колеса.
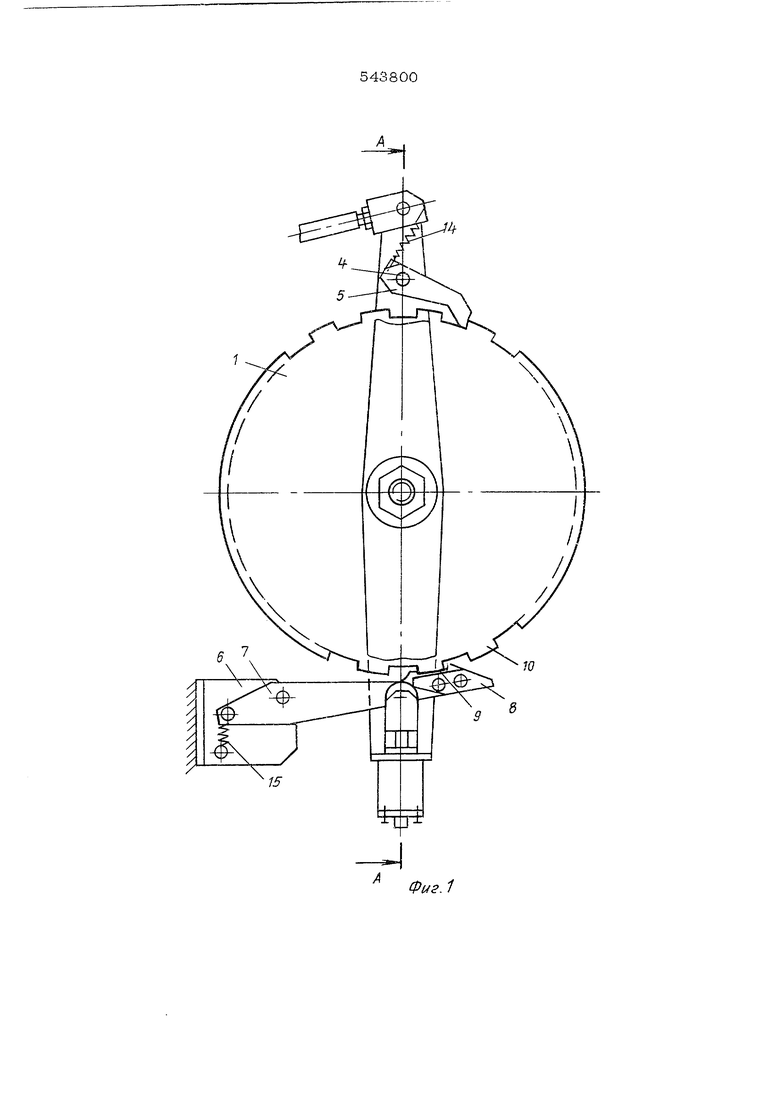
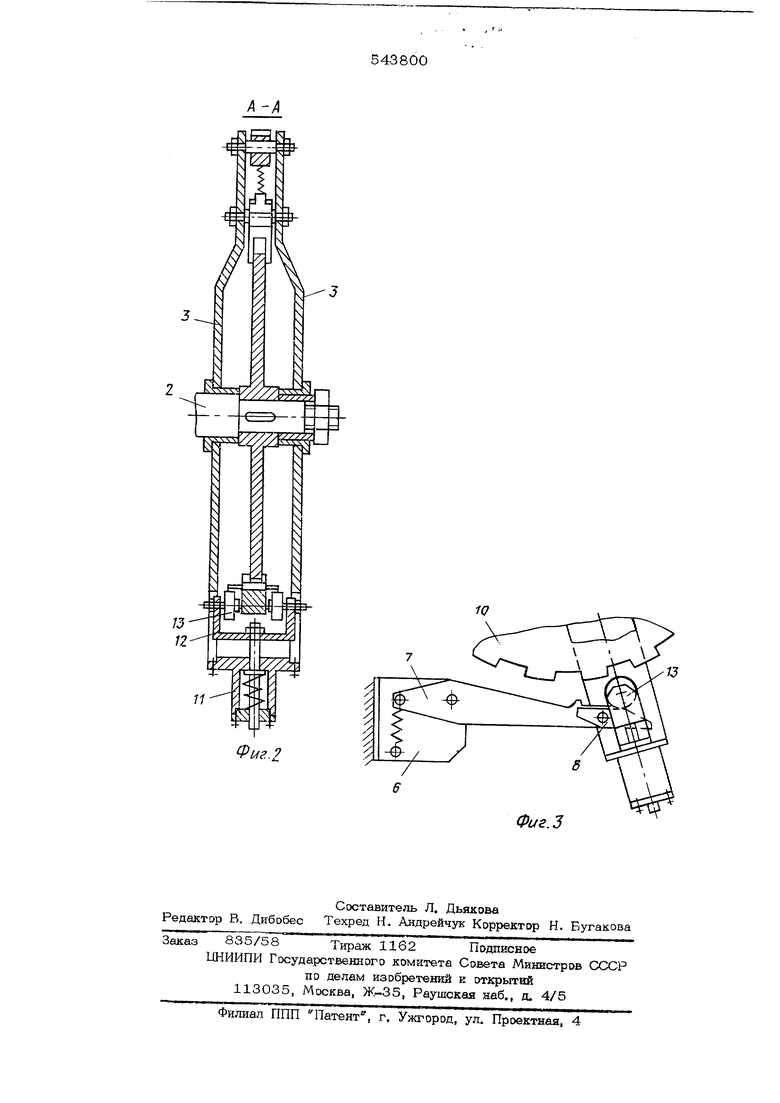
На фиг. 1 изображен храповой механизм общий вид; на фиг. 2 - разрез А-А на фгсг. 1; на фиг, 3 - фиксирующая собачка, при рабочем ходе колеса.
Храповой механизм содержит храповое колесо 1, закрепленное на валу 2, свободно установленное на TDM же валу водило 3, састояшее из двух частей, охватывающих храловае кг.ггесгз. На водиле устано.&лена с возможностью поворота вокруг оси 4 собащ :а 5. С против оно ложной стороны храпового колеса на опоре 6 шарнирно устанойлена фиксирующая собачка 7 на боковых сторонах которой закреплены копирные нак.iia.oKjj 8j а на поверхности, обращенной к :;фаповому колесу, выполнен паз 9j форма которого соответствует форме зубьев 10 храпового колеса. На торце водила закреплен стакан ll в котором устанокаена подпружиненная вилка 12с двумя роликами 13 Рабочая 5 и фиксируюшая 7 собачки пршки /;аются к храповому колесу пруж-инами 14 и 15. Водило полЗ чает качательное движение DT привода, капри&гер силового цилиндра, кр .зсШиш:1С --шатуняэго, кулисного или других N-iexaHHavioB (ка чертеже не показан). Качающаяся вместе с водилом рабочая собачка о при качакии водила по часовой стрелке совершает сЕ:)бодлый ход, продолжающийся до момента зацепления собачки с очередным эубрм :храпового колеса, после чего храпозое колесо, а следовательно, и вал поворачи заются на определенный уг-ол. Одновременно с этим на протяжении свободнаг-о кода рабочей собачки 5 ролики 13 вилки 1 2- бпагодаря скосам на копирньсс накпа :1}.ел 8, отодврггают фиксирующую собач ку 7 от :хранового колеса 1, а при дальнейшем ходе, перекатываясь по ровному участк удержи.Ьс|1от ее з т-эком положении до конца рабоче г-и хода привода, В конце хода рабочая собачка 5 останав .пивается, а фиксирующая собачка 7 под дей CTSiieiv; кружинь 15 соскакивает с ролшсов J.3 и, прижимаясь к храповому колесу, ев ,и пазом 9 захватывает очередной зуб 10, жестко застопорив храповое колесо. При обратном ходе приводного механизма рабочая собачка 5 приподнимается и переходит за очередной зуб 10 храпового колеса, а ролики 13 заходят по скосу на наружную сторону копирных накладок 8, создавая с помошью подпружиненной вилки 12 дополнительное усилие на фиксирующую собачку 7, В конце обратного хода водила ролики 13 соскакивают с копирных накладок 8, освобождая фиксирующую собачку 7, В дальнейшем цикл повторяется,, Формула изобретения Храповой механизм, содержащий храповое колесо с рабочей собачкой, водило, на котором размещена ось рабочей собачки, и фиксир тощую собачку, взаимодействующую с храповым колесом, отличающийс я тем, что, с целью повышения надежности и точности фиксации, он снабжен размещенными на фиксирующей собачке копирными накладками, расположенной на водиле и подпружиненной в радиальном направлении храпового колеса вилкой и установленными на ней роликами, взаимодействующими с копирными накладками, а на фиксир тощей собачке вьшолнен паз, форма которого соответствует форме зубьев храпового колеса. Источники информации, принятые во вни-мание при экспертизе: 1.Авторское свидетельство СССР № 214986, М. Г 16 Н 29/02, 1966, 2.Авторское свидетельство СССР № 366290, М, Р16 Н 27/04, 1970. 3.Артоболевский И. И. Механизмы в современной технике, т.П, И., Наука, с. 668, рис. 806 (прототип).
4
Фиг.1
//
.2
/
Фиг.З
