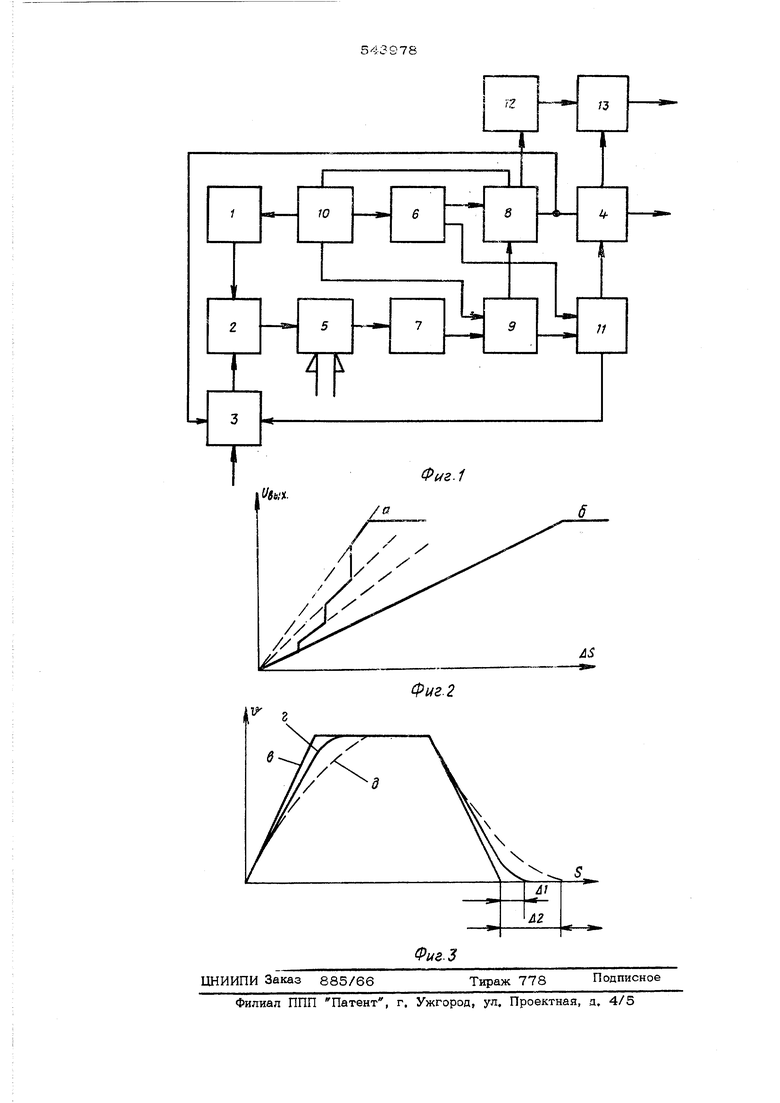
Изобретение :)Т 1ост;тся к автзл ап:ке и вычис ительной тех1;ике и мэжет iiaiiTir применение в замкнутых ся( числового программного управления (СЧПУ) положением подвижных элементов станка. Известен преобразователь перемещений в код по авт, свид. Xv 519746. Этот преобразователь имеет ограниченны динамические характеристики, что выражается в почучении дополнительной динамической погрешности отслеживания перемещения подвижного органа станка пг. заданной програм в режиме контурной обработки. Целью изобретения является уменьшение динамической погр€1шност:1 преобразователя перемещения в код. Это достигается те, что в преобразователь введены формироватеть опэрногз н;лпряжения и дополнительнь;й Ш фрс-аналоговый преобразователь, один пз входов котооого соединен с реверсивных; счетчиком,а другой - с выходом фор п рователя опорного напряжения, вход которого соединен с вьхэдом блока выбора дискретности. BToi.oro Шфро-аналогового преобразователя яв яогся выходом преобразователя поррмощонпя в код. На фпг. 1 iio;,Oi;.;-A, с1ГУкт;/f | ая схема прэобг1азоБат: л;; : ;p;.N-;3i;jO:iiiH в коа; на фпг. 2 - характ:;|.ч:ст;;ка арээбразовотэля, на фиг. о - ьа:иск;лость скорости asp lSlliSния от его всл-Чииы. Преобразовато-п; содержит фильтр 1, цифро-аналоговь:й прообразоватсть 2, реверсивнь:е счетчики 3,4. датчик 5, форлпрователь динамических программ 6, усилитель 7, блок выбора дискретност;-: А, анализатор рас :огллсо вания 9, расиредетггтоль 10, блок Егьбс)|а знака 11, фор ;ироватеть опорного наиряжпипя 12, дополнительны цифро-аналоговый преобразователь 13. Импульсньи сигнал распреде.лителя 10 фильтром 1 иреобразуется в синусот1дальньи1, являющийся 1есущим иапряжениел.-i информаиионного сигнала. В цифро-аналоговом преоС разоват-по 2 производится кюдз лирование этого напряжения по законам синуса и косинуса. Амплитуда модуляции определяется сигнаio vf, поступающим со счетчика 3, состояние
которого устанавливается блоками выбора знака 11 и дискретности 8 в зависимости от знака сигнала, поступающего с датчика 5 через усилитель 7 в анализатор рассогласования 9. Анализатор рассогласования 9 определяет знак сигнала рассогласования. Сигнал с анализатора рассогласования 9 через блоки выбора дискретности 8 и знака 11 записывается в счетчик 3 и с противоположным знаком в счетчик 4.
Дискретность обработки сигнала рассогласования выбирается по результату анализа тестовой программы,, задаваемой формирователем динамических программ 6. Сче-рчик 4 является накопителем рассогласования. Его выход является цифровым выходом устройства. Для управления приводом (на чертеже не показан) цифровой сигнал со счетчика 4 цифро-аналоговым преобразователем 13 преобразуется в аналоговый сигнал. Опорное- напряжение для этого сигнала формируется формирователем опорного напряжения 12, управляемым блоком выбора дискретности 8 так, что величина его пропорциональна скорости изменения информации.
Устройство работает следующим образом. Распределитель 1О вырабатывает тактирующие импульсы. Сигнал, поступающий на цифро-аналоговый преобразователь 2 с фильт ра 1, 1преобразуется в два модулированных по законам синуса и косинуса напряжения, отношение амплитуд которых равно тангенсу угла, пропорционального величине перемещения подвижной части датчика относительно неподвижной.
Состояние цифро-аналогового преобразователя 2 определяется сигналами, поступающими со счетчика 3, запись в который производится сигналом, такой величины, чтобы скомпенсировать рассогласование ( ДЗ ), вызванное перемещением подвижной части датчика 5 исполнительным механизмом. Эта величина определяется блоком выбора дискретности 8, а знак сигнала - блоком выбора знака 11. Этот же сигнал, но с противоположным знаком, записывается в счет чик 4.
Анализ величины рассогласования производится следующим образом.
Определение истинного значения измеряемой величины осуществляется заданием динамической тестовой программы, имеющей переменную дискретность, сравнением и логическим анализом переходов через нуль положительного и отрицательного приращений
компенсационной величины. Дискретность програмг-лы определяется результатом анализа величины рассогласования: с увеличением рассогласования дискретность увеличивается и наоборот. Работа анализатора рассогласования 9 и блока выбора дискретности 8 тактирована от распределителя 10,
Для управления приводом цифровой сигнал со счетчика 4 преобразуется цифре-аналоговым преобразователем 13 в постоянное напряжение, величина которого пропорциональна перемещению.
Так как постоянный наклон характеристики преобразователя при увеличении рассогласования приводит к увеличению отставания привода от программы, т.е. увеличению динамической ошибки (см. фиг. 2 и 3), то для изменения крутизны ее введен формирователь опорного напряжения 12. Он формирует опорное напряжение с величиной, зависящей от величины дискретности отработки сигнала рассогласования. Характеристика преобразователя 13 имеет вид, показанный на фиг. 2, где кривая характеристика преобразователя с переменной крутизной, кривая о - с постоянной крутизной.
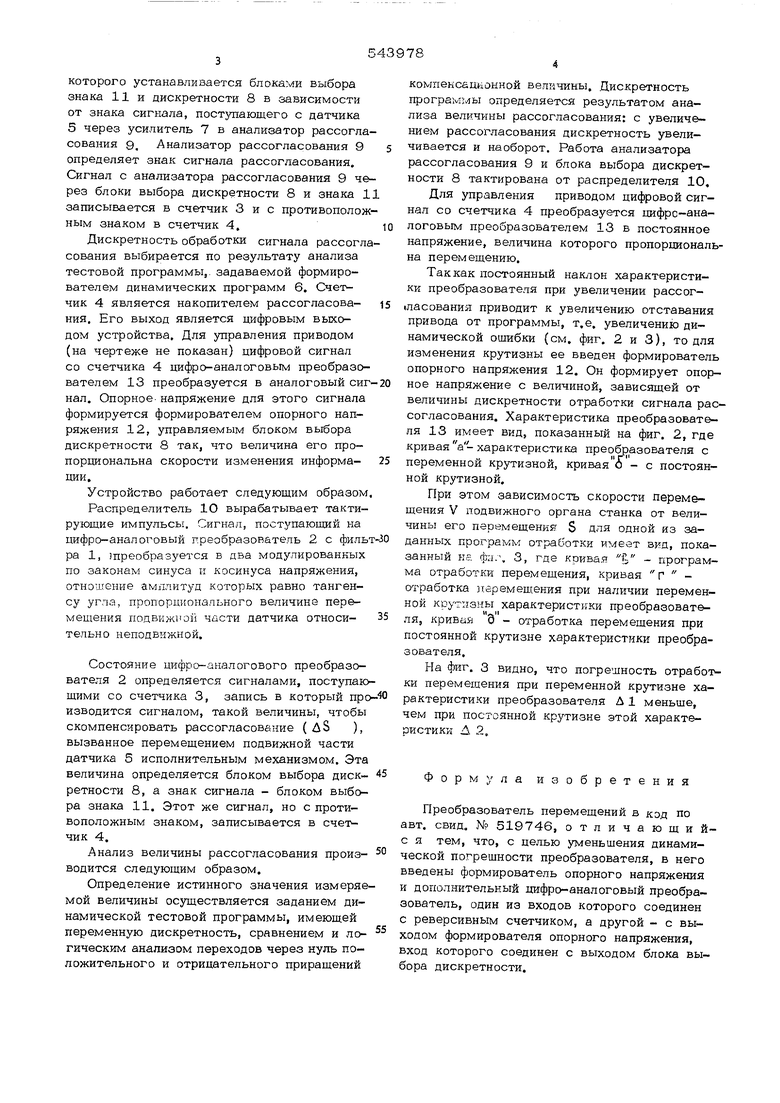
При этом зависимость скорости перемещения V подвижного органа станка от величины его перемещения S для одной из заданных программ отработки имеет вид, показанный Не. фл. 3, где кривая S - гфограмма отработки перемещения, кривая г отработка зтеремещения при наличии переменной крутизны характеристики преобразователя, кривая д - отработка перемещения при постоянной крутизне характеристики преобразователя.
На фиг. 3 видно, что погрешность отработ ки перемещения при переменной крутизне характеристики преобразователя Д 1 меньше, чем при постоянной крутизне этой характеристики 2,
Формула изобретения
Преобразователь перемещений в код по авт. свид. № 519746, отличающийс я тем, что, с целью уменьшения динамической погрешности преобразователя, в него введены формирователь опорного напряжения и дополнительный цифро-аналоговый преобразователь, один из входов которого соединен с реверсивным счетчиком, а другой - с выходом формирователя опорного напряжения, вход которого соединен с выходом блока выбора дискретности.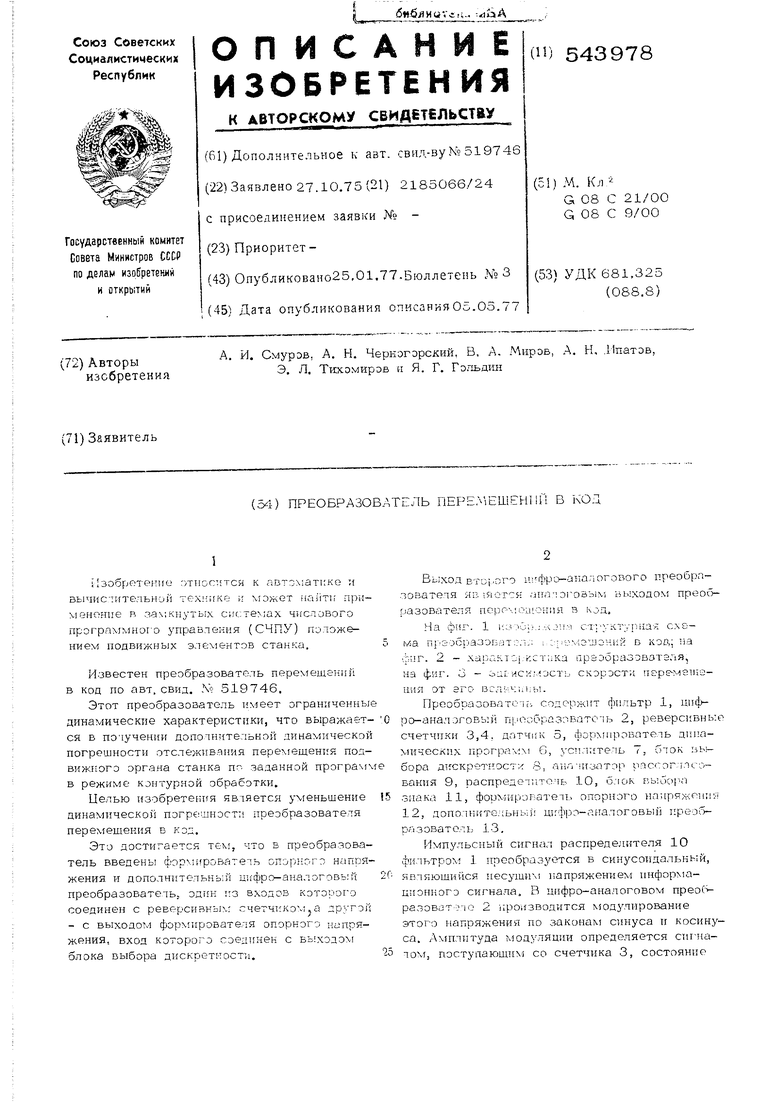
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений в код | 1977 |
|
SU620999A2 |
| Преобразователь перемещений в код | 1974 |
|
SU519746A1 |
| Преобразователь перемещений в код | 1977 |
|
SU674067A1 |
| Устройство для преобразования перемещений в код | 1978 |
|
SU742999A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| Многоканальное устройство для управления следящими приводами | 1977 |
|
SU691809A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1111189A1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |