1
Изобретение относится к машиностроению, а именно, к устройствам для контроля линейного перемещения рабочих органов металлорежущих станков.
Известно устройство для контроля позиционирования рабочих органов станка, приводимых в движение посредством ходового винта, содержащее датчик положения, соединенный с электронным блоком измерения величины перемещения рабочих органов 1.
Недостатком этого устройства является сложность выполнения безлюфтовых соединений ходового винта с рабочим органом.
Наиболее близким к предлагаемому изобретению ио технической сущности является устройство для линейной индикации позиционирования рабочего органа, приводимого в движение посредством ходового винта, содержащее импульсный датчик и связанный с ним блок индикации, позволяющий визуальный отсчет величины линейного перемещения рабочего органа. Импульсы, поступающие от датчика, используемые в качестве измерительных сигналов, подаются на блок индикации, где преобразуются в световые цифровые изображения величины перемещения рабочего органа 2.
Однако в этом устройстве не предусмотрен учет влияния люфта между ходовым винтом и рабочим органом на показания блока индикации, из-за чего возникает несоответствие между показаниями блока индикации и фактическим перемещением рабочего органа, эквивалентное величине люфта.
Целью изобретения является автоматическое исключение влияния люфта между ходовым винтом и рабочим органом на показания блока индикации. Это достигается тем, что устройство снабжено включенным между датчиком и блоком индикацнн промел-суточным блоком, содержащим первый, второй и третий электронные ключи, управляемый счетчик импульсов, триггер и узел образования сигнала «сброс, вход
которого соедииен с выходом датчика. Последний соединен с первыми входами первого и третьего электронных ключей. Выход первого ключа связан со входом счетчика, выход которого через второй ключ соединен
со входом триггера, а выход последнего - со вторыми входами первого и третьего электронных ключей. Выход узла образования сигнала «сброс связан со сбросовымн входами счетчика и триггера.
На чертеже изображено предложенное устройство.
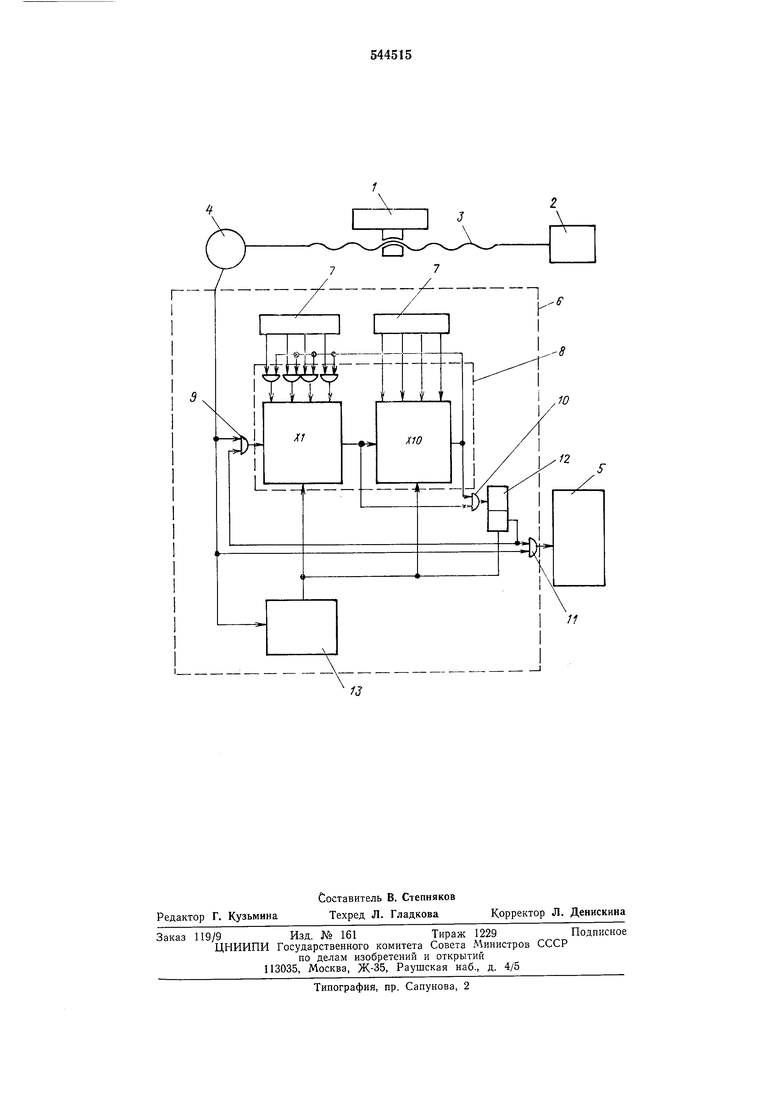
Рабочий орган 1 приводится в движение от привода 2 посредством ходового впита 3, соединенного с импульсным датчиком 4, н.мпульсы с которого поступают в блок 5 индикации
через промежуточный блок 6. Последний содержит управляемые переключатели 7 с шифратором обратного кода, управляемый счетчик 8 импульсов, электронные ключи 9, 10 и 11, триггер 12 и узел 13 образования сигнала «сброс.
Устройство работает следующим образом.
С помощью переключателей 7 с шифратором обратного кода в счетчике 8 записывается число, эквивалентное заранее измеренной величине люфта между ходовым винтом 3 и рабочим органом 1. С началом вращения ходового винта импульсы с датчика 4 поступают на вход счетчика 8 и заполняют его до того момента, пока количество их не станет равным величине имеющихся в счетчике потенциалов, эквивалентной величине люфта, в результате чего в счетчике 8 формируется импульс переполнения. Последний, пройдя через ключ 10, меняет состояние триггера 12, сигнал с которого запрещает прохождение импульсов через ключ 9 на вход счетчика 8 и разрешает их прохождение через ключ 11 на блок 5 индикации. С этого момента блок индикации начинает показывать фактическую величину перемещения рабочего органа.
В момент реверса привода 2 в узле 13 формируется сигнал «сброс, который возвращает счетчик 8 и триггер 12 в исходное состояние, и весь процесс повторяется сначала.
Таким образом, каждый раз в начале движения рабочего органа и при его реверсе блок индикации начинает показывать отсчет линейного перемещения с учетом люфта между ходовым винтом и рабочим органом, чем автоматически исключается ошибка в показании блока индикации.
Использование предлагаемого устройства позволяет автоматически исключать влияние
люфта между ходовым винтом и рабочим органом из показаний блока индикации и тем самым более эффективно использовать последний при отсчете перемещения рабочего органа, например суппорта или каретки, без необходимости предварительной коррекции люфта в начале их перемещения и при реверсе.
Формула изобретения
Устройство для индикации позиционирования рабочего органа, приводимого в движение посредством ходового винта, содержащее импульсный датчик и связанный с ним блок
индикации, отличающееся тем, что, с целью автоматического исключения влияния люфта между ходовым винтом и рабочим органом на показания блока индикации, оно снабжено включенным между датчиком и блоком
индикации промежуточным блоком, содержащим первый, второй и третий электронные ключи, управляемый счетчик импульсов, триггер и узел образования сигнала «сброс, вход которого соединен с выходом датчика,последНИИ соединен с первыми входами первого и третьего электронных ключей, выход первого ключа соединен со входом счетчика, выход которого через второй ключ соединен со входом триггера, выход последнего соединен со
вторыми входами первого и третьего электронных ключей, а выход узла образования сигнала, «сброс соединен со сбросовыми входами счетчика и триггера. Источники информации, принятые во внимание при экспертизе:
1.Патент США № 3241389, кл. 74-4248, 1966.
2.Журнал «Machine ontie, Франция, 1971 г., № Т-6, стр. 209 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| Устройство для управления промышленным роботом | 1981 |
|
SU970320A1 |
| Устройство для автоматического копирования линии сварного соединения | 1985 |
|
SU1318356A1 |
| Устройство управления и контроля работы невзрывных импульсных источников сейсмических сигналов | 1986 |
|
SU1408402A1 |
| Токарно-винторезный станок | 1987 |
|
SU1526954A1 |
| Привод периодической подачи | 1980 |
|
SU884948A1 |
| Устройство цифровой индикации линейных перемещений | 1975 |
|
SU657962A1 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ЛЕКАРСТВЕННЫХ ПРЕПАРАТОВ | 1991 |
|
RU2012358C1 |
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
| Устройство для измерения положения рабочего органа станка | 1980 |
|
SU929398A1 |