1
Изобретение относится к сканирующим устройствам ДЛЯ неразрушающего контроля труб с наружными винтовыми ребрами и может найтн нрименение в металлургической промышленности и в атомной энергетике.
Известно устройство для контроля нзделий цилиндрической формы, содержащее каретку, снабжеиную направляющими колесами, ободы которых обеспечивают обкатку каретки по трубе, преобразователь, устройство поворота каретки и ее привод 1.
Известно высокоскоростное устройство для контроля ребристых труб, являющееся прототипом изобретения, содержащее каретку с двумя опорами кольцеобразной формы, устарювленный на каретке по крайней мере однн преобразователь, направляющие щтпфты, ориентирующие отиосительно преобразователя контролнруемую трубу н привод теремещення трубы 2.
Целью изобретения является сканирование изделий с наружными винтовыми ребрами и контроль околореберной зоны.
Это достигается тем, что устройство снабжено самоцентрпруЕОЩимся патроном, через который проходит изделие, радиально-упорным подщипником, связанным наружной обоймой с кареткой, а внутренней - с патроном, приводом колебательного движения патрона, взаимодействующим посредством щатуна с
внутренней обоймой нодщппннка п сообщающим последней колебательное двпженне относительно осп вращения, а патрон вьшолнен с зажимными кулачками в виде подпружиненных в направлени : осп перемещения ролнков по чпслу ребер изделия, установленных с йозмо;к1юстью врапления вокруг двух взаимноиериендикулярных осей, расположенных в ПЛОСКОСТИ, нерпенднкулярной осп перемещепня каретки, а преобразователп, количество которых равно числу ребер, щарнирно соединены с патроном.
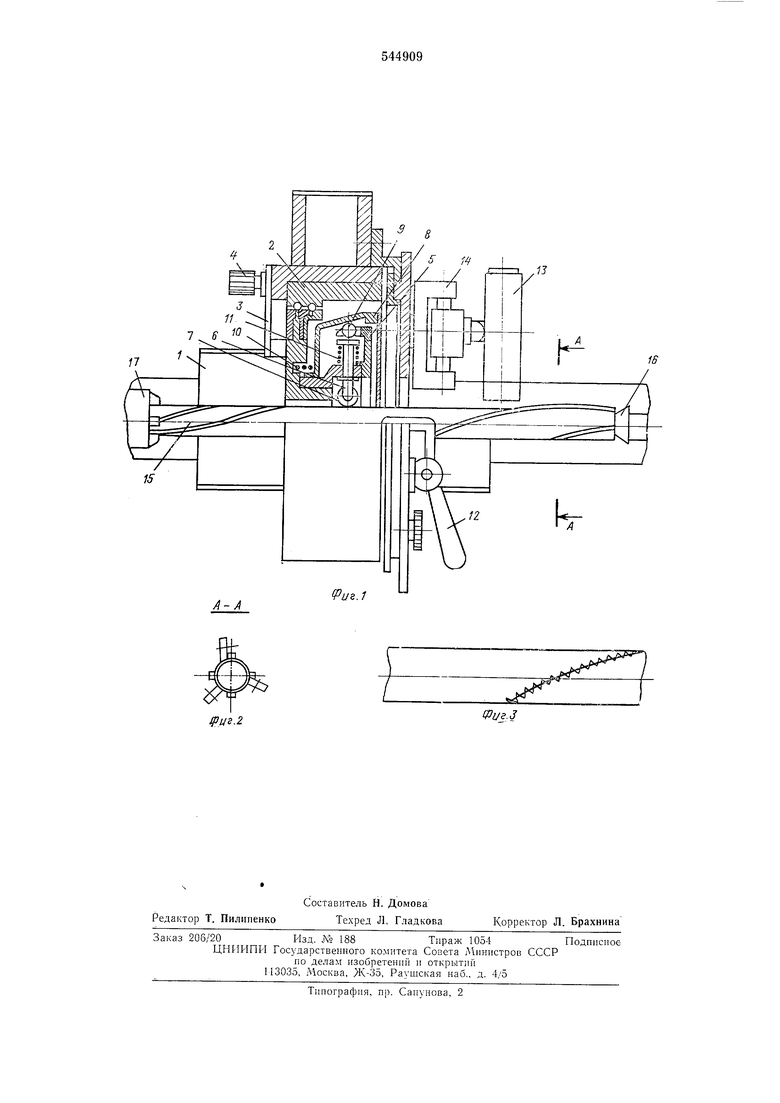
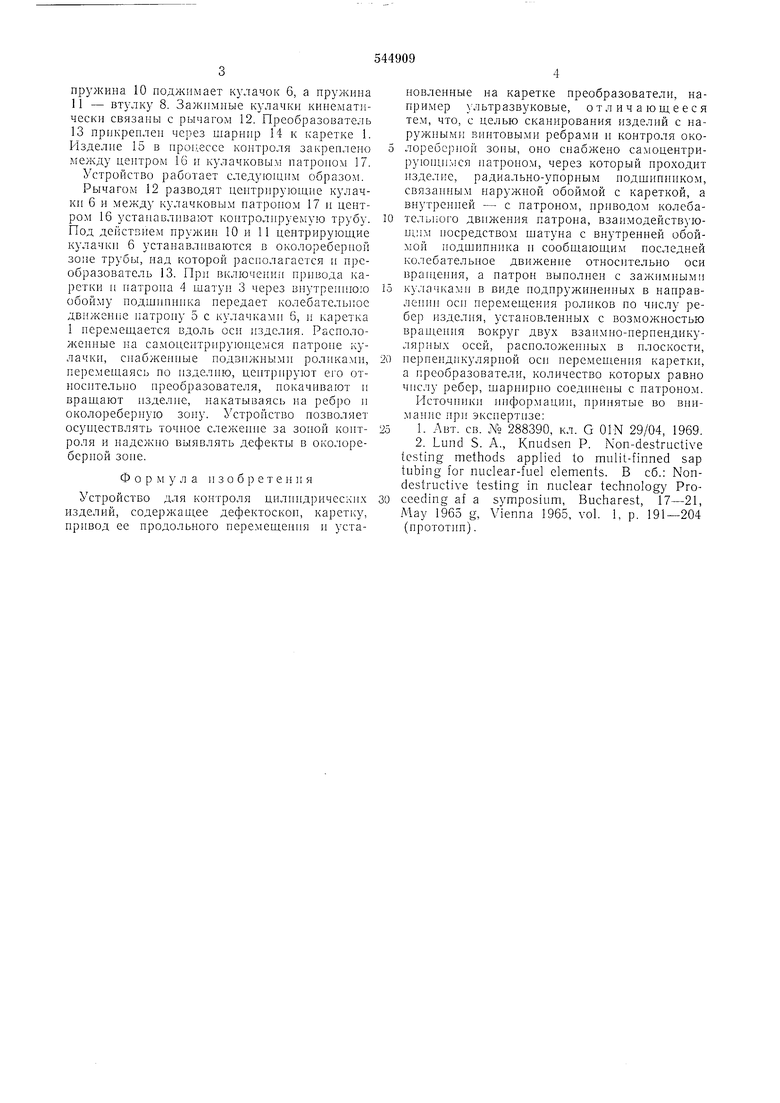
На фиг. 1 иоказапо предлагаемое уетройство, общпй вид; на фпг. 2 - сечение по А-А
па фиг. 1; на фпг. 3 - траектория сканирования.
Устройство ДЛЯ контроля цилиидричееких изделий с иаружиым винтовыми ребрами содержит каретку 1, радиально-упорный щариконодщпнппк 2, устаиовлеппый iia его наружной обойме щатун 3, один конец которого тарнпрно соединен с ириводом 4 колебательного двпження, а второй - с внутренней обоймой подщппника, иа которой установлен
самодектрирующийся патрон 5. В патроне 5 размен ены зажнмиые центрирующие кулачки 6, которые снаб;кеиы роликами 7, коитактирующими с изделием в процессе коигроля. Кулачки 6 взаимодействуют с коиичеекой
втулкой 8 через нажимной niapriK 9, при этом
пружина 10 поджимает кулачок 6, а пружина 11 - втулку 8. Зажимные кулачки кинематически связаны с рычагом 12. Преобразователь 13 прикреплен через шариир 14 к каретке 1. Изделие 15 в npoLiecce контроля закреплено между пептром 16 и кулачковым иатропом 17.
Устройство работает следующим образом.
Рычагом 12 разводят неитрирующие кулачки 6 и между кулачковым иатроиом 17 и центром 16 устанавливают коптролпруемую трубу. Под действием пружии 10 и 11 центрируюпше кулачки 6 устанавливаются в околореберпой зоне трубы, над которой располагается и преобразователь 13. При включении привода каретки н патрона 4 шатуп 3 через внутреннюю обойму подшппннка нередает колебательное движение патропу 5 с кулачкамн 6, и каретка 1 перемещается вдоль оси изделия. Расположенные на са.моцеитрируюнлемся иатроне кулачки, спабженпые нодзижнымн роликами, перемещаясь по нзделпю, цептрпруют его относ 1тельно преобразователя, покачивают и вращают изделие, накатываясь на ребро н околореберную зону. Устройство позволяет осун;ествлять точное ележеипе за зоной контроля и падежпо выявлять дефекты в око.юреберпой зопе.
Фор м у л а н 3 о б р е т е i-i н я
Устройство для контроля цилппдрпческпх изделий, содержащее дефектоскоп, каретку, нрпвод ее продольиого перемещения и установленные на каретке преобразователи, напри.мер ультразвуковые, отличающееся тем, что, с целью сканирования изделий с наружными винтовыми ребрами н контроля околореберпой зоны, опо снабжено самоцентрируюни1мся натроном, через который проходит пзделие, радпально-упорным подщииником, связанным наружной обоймой е кареткой, а внутренней - с патроном, приводом колебательпого движения патроиа, взаимодействующим посредством щатуна с внутренней обоймой подшипн Нса и еообщающим последней колебательное движение относительно оси врап1,ення, а патрон выполнен с зажимными
кулачкамп в виде подпружиненных в направлении оси перемещения роликов ио числу ребер изделия, установленных с возможностью врап1,еппя вокруг двух взапмно-пернеидикулярных осей, расноложенных в плоскости,
перпендикулярной оен перемещення кареткп, а преобразователи, количеетво которых равно числу ребер, щарнирио соедииены с патроном. Источники ппформации, принятые во внимание нрп экспертизе:
1. Авт. св. Л 288390, кл. G 01N 29/04, 1969. 2. Lund S. А., Knudsen Р. Non-destructive testing methods applied to muiit-finned sap tubing for nuclear-fuel elements. В сб.: Nondestructive testing in nuclear technology Proceeding af a symposium, Bueharest, 17-21, May 1965 g, Vienna 1965, vol. 1, p. 191-204 (ирототип). JT J л/, l4
Уиг.2
Фиг.З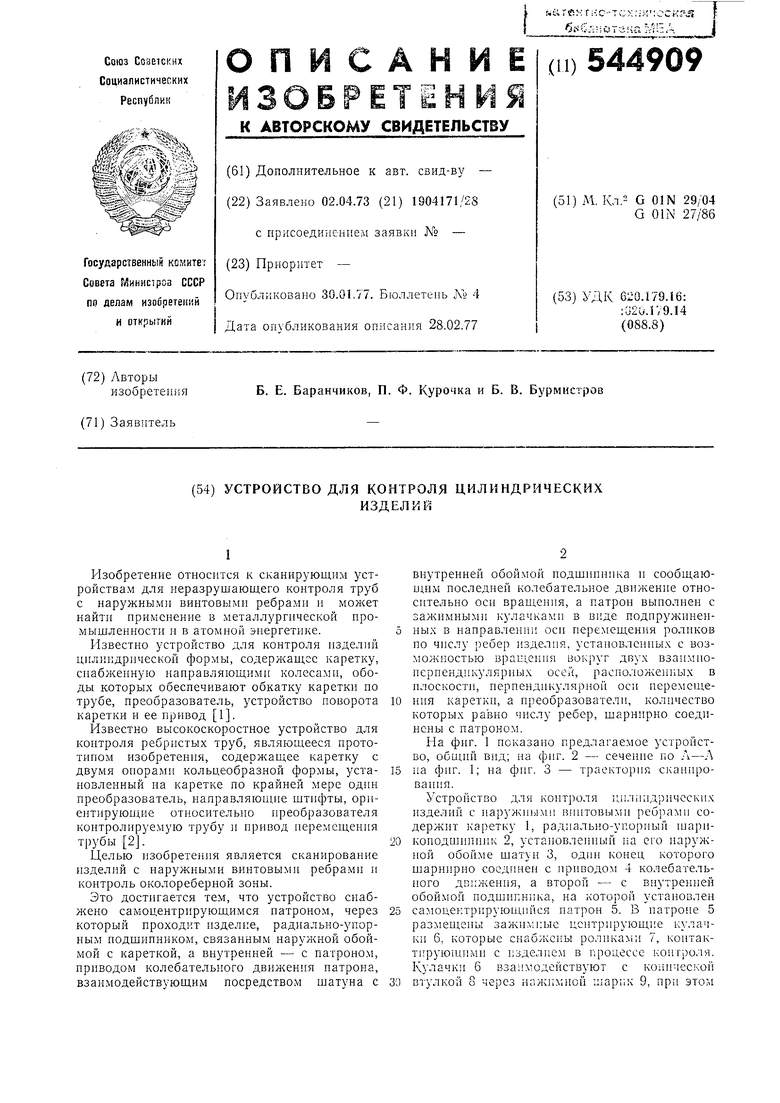
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулачковый самоцентрирующий патрон | 1974 |
|
SU503642A1 |
| УЛЬТРАМИКРОТОМ | 1967 |
|
SU192431A1 |
| Устройство для накатки кольцевых канавок на трубчатых заготовках | 1983 |
|
SU1133000A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ТОНКОСТЕННЫХ ТРУБЧАТЫХ ВИНТОВЫХ ШТАНГ | 2021 |
|
RU2776915C1 |
| Механизм подачи стана холодной прокатки труб | 1975 |
|
SU550189A1 |
| Стан для переменно-периодической прокатки трубчатых конических изделий | 1978 |
|
SU763029A1 |
| Многониточный стан периодическойпРОКАТКи издЕлий | 1977 |
|
SU795681A1 |
| Патрон к механизированным ручным инструментам | 1981 |
|
SU1061980A1 |
| МЕХАНИЗМ ПОДАЧИ И ПОВОРОТА СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1999 |
|
RU2207202C2 |
| Устройство для обработки внутренних поверхностей | 1983 |
|
SU1162574A1 |