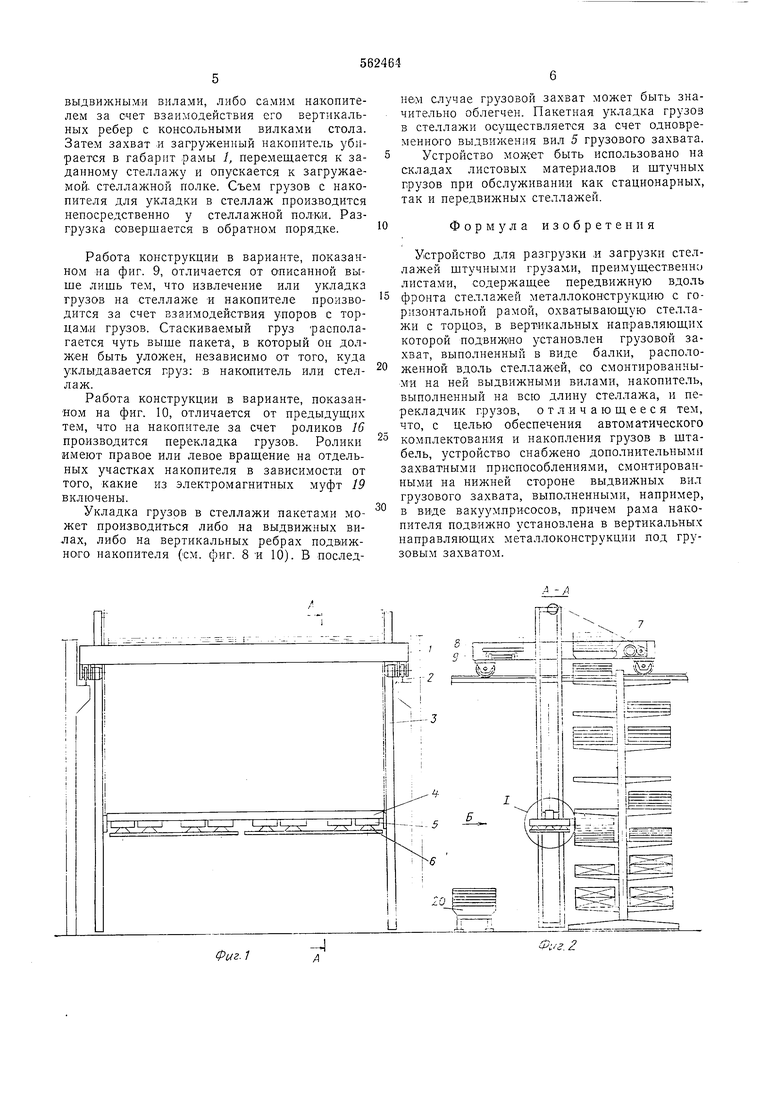
выдвижных ЗИЛ смонтиро-ваны дополнительные захваты 6. На горизонтальной раме металлоконструкции установлен накопитель 7 с вертикальными грузонесущими ребрами и перекладчик грузов, который ра:Сноложе;1 по другую сторону от захвата и выполнен в виде каретки 8, подвижно установленной в нродольных направляющих 9.
Дополнительные захваты выполнены в виде вакуумприсосов 10 (конструкция вакуумприсосов лодрО|бно не описывается, так как широко известна).
В варианте конструкции, показанной на фиг. 5, вакуумприсосы смонтированы на выД1ВИЖ.ИЫХ вилах захвата, которые выполнены Т10|Воротными вокруг вертикальной оси //.
В варианте конструкции, показаной на фиг. 6, дополнительные захваты выполнены в виде электромагнитов 12. В варианте конструкции, показанной на фиг. 7, дополнительные захваты выполнены в виде крюков 13. вза.имодействующих с грузами, снабженными для этого петлями М. В варианте конструкции, показанной на фиг. 8, накопитель для .грузов установлен подвижно в вертикальных напра вляющих металлоконструкции под грузовым захватом. Накоцитель имеет независимое вертикальное перемещение относительно захвата от собственного привода, установленного на горизонтальной раме, и взаимодействует с грузовым захватом.
В варианте конструкции, показанной на фиг. 9, дополнительные захваты выполнены в виде упоров 75, смонтированных на обоих концах выдвижных вил 5 и вза.имодействующих с тордам.и грузов.
В варианте конструкции, показанной на фиг. 10, накопитель, подвижно установленный под грузовым захватом, выполнен в виде роликового конвейера, ролики 16 которого установлены на вертикальных ребрах. Ролики имеют общий при1водной .вал /7 и связаны с ним при ПОМОП1И конических зубчатых колес. Конические зубчатые колеса 18, установленные на валу J7, могут отключаться от него все в.месте иди группами при помощ.и электромагнитных муфт 19. Отдельные группы роликов могут реверсироваться и затормаживаться независимо от остальных.
Устройство работает следующим образом.
На загрузочном столе 20 с вертикальными или консольными ребрам.и фор,мируется пакет грузов (листов) по высоте. Пр,и небольшой длине грузов (листов) по длине стола может быть уложено несколько пакетов. Формирование пакетов осуществляется любым методом, включая использование дополнительных зах(ватов (присосов, электромагнитов, крюков) предлагаемого устрорктва. Грузы снимаются со стола выдвижными вилами 5 грузового захвата, поднимаются в габар.ит рамы / металлоконструкции и перекладываются в накопитель за счет утанливания выдвиж/ных вил между ребрами накопителя
цо высоте. Затем грузы транспортируются к заданному межстеллажному проходу. Захват с выдвижными вилами приподнимается над пакетами грузов, вилы выдвигаются над накопителем с грузами, и захват опускается нч пакет вакуумприсосами. Захват с помощью вакуумприсосов снимает верхние грузы с иакетов и выдвижные вилы возвращаются в исходное положен.ие. Затем захват опускается к загружаемой стеллажиой полке, выдвижные вилы вводятся в стеллаж и укладывают грузы на стеллажную полку. В том случае, когда по длине стеллажной полки уже уложены пакеты грузов разной высоты, пакеты дополняются грузами последовательно. Вначале вилы вь1двигаются напротив пакета большей высоты, укладывают грузы и возвращаются в исходное положение, затем грузы укладываются в пакеты меньшей высоты. Таким же образом, как описано выше, в стеллаж укладывается оставшийся в накои ;теле груз. Если при последней загрузке оставшийся в накопителе груз не соответствует заданным места.м загрузки на стеллажных , то в работу вступает перекладчик грузов. Каретка 8 перекладчика перемещается в направляющих 9 и устанавливается напротив груза в накопителе, подлежащего перекладке. Груз снимается выдвижными вилами захвата, укладывается на перекладчик и транспортируется к заданным выдвижным вилам, которые сни.мают груз с перекладчика и укладывают его в стеллажи. Г1ри загрузке последующих стеллажных полок пгрекладка, при необходи.мости, совершается аналогично описанному выше. Устройство с порожним накопителем возвращается к столу 20 или производит разгрузку стеллажей, осуществляемую аналогично описанному выше, но в обратном порядке.
Работа конструкции в варианте, пока.занном на фиг. 5, ана.логична вышеописанной и отличается лишь тем, что выдвижение вил происходит за счет их поворота вокруг вертикальной оси, а также очередностью укладки грузов на стеллажную полку, которая соблюдается уже при съеме с накопителя.
Последовательность операций при работе конструкции в вариантах, показанных на фи1Г. 6 и 7, происходит так же, как и при работе с вакуумприсосами. Различие заключается в характере взаимодействия дополнительных захватов с грузами.
При магнитном сцепе в верхнюю часть грузов (контейнеров) должны быть за.ранее вмонтированы металлические пластины 21, взаимодействующие с магнитными за.х-ватами, а при механическом сцепе выдвижные вилы могут совершать дополнительное движение по вводу или выводу крюка из зацепления.
В варианте конструкции, показанной на фи,г. 8, устройство работает следуЕощим образом. Пакеты грузов снимаются со стола 20 и перекладываются в подвижный накопитель
выдвижными вилами, либо самим накопителем за счет взаимодействия его вертикальных ребер с консольными вилками стола. Затем захват и загруженный накопитель уб; рается в габарит .рамы /, перемещается к заданному стеллажу и опускается к загружаемой- стеллажной полке. Съем грузов с накопителя для укладки в стеллаж производится непосредственно у стеллажной полки. Разгрузка совершается в обратном порядке.
Работа конструкции в варианте, показанном на фиг. 9, отличается от олисанной выше лишь тем, что извлечение или укладка грузов на стеллаже и накопителе производится за счет взаимодействия упоров с торцам.и грузов. Стаскиваемый груз располагается чуть выше пакета, в который он должен быть уложен, независимо от того, куда уклыдавается груз: в накопитель или стеллаж.
Работа конструкции в варианте, показанном на фиг. 10, отличается от предыдущих тем, что на накопителе за счет роликов 16 производится перекладка грузов. Ролики имеют правое или левое вращение на отдельных участках накопителя в зависимости от того, ка.кие из электромагнитных муфт 19 включены.
Укладка грузов в стеллажи пакетами может производиться либо на выдвижных вилах, либо на вертикальных ребрах подвижного накопителя (см. фиг. 8 и 10). В последнем случае грузовой захват может быть значительно облегчен. Пакетная укладка грузов в стеллажи осуществляется за счет одновременного выдвижения вил 5 грузового захвата. Устройство может быть использовано на складах листовых материалов и штучных грузов при обслуживании как стационарных, так и передвижных стеллажей.
Формула изобретения
Устройство для разгрузки и загрузки стеллажей штучными грузами, преимущественно листами, содержащее передвижную вдоль
фронта стеллажей металлоконструкцию с горизонтальной рамой, охватывающую стеллажи с торцоз, в вертикальных направляющих которой подвижно установлен грузовой захват, выполненный в виде балки, расположенной вдоль стеллажей, со смонтированными на ней выдвижными вилами, накопитель, выполненный на всю длину стеллажа, и перекладчик грузов, отличающееся тем, что, с целью обеспечения автоматического
комплектовакия и накопления грузов в штабель, устройство снабжено дополнительными захватными приспособлениями, смонтированными на нижней стороне выдвижных вил грузового захвата, выполненными, например, в виде вакуумприсосов, причем рама накопителя подвижно установлена в вертикальных направляющих металлоконструкции под грузовым захватом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547379A1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU547377A1 |
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547378A1 |
| Устройство для загрузки и разгрузки стеллажей склада штучными грузами | 1974 |
|
SU685569A1 |
| Устройство для азгрузки стеллажей штучными грузами и разгрузки их | 1974 |
|
SU547376A1 |
| Стеллаж для хранения штучныхгРузОВ | 1979 |
|
SU806554A1 |
| Устройство для загрузки и разгрузки стеллажейСКлАдА | 1979 |
|
SU839883A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Устройство для накопления и выдачи штуч-НыХ гРузОВ | 1978 |
|
SU835892A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ и РАЗГРУЗКИ СТЕЛЛАЖЕЙ | 1973 |
|
SU391980A1 |


Фиг. А
Jтг
JU
Фиг. 5
125
/
21
1 Г . - - U
5 4
иг 9
